PWM脉冲调制直流电机的simulink仿真
仿真模型构建
电机原理
直流电机的4个动态特性方程式分别为:
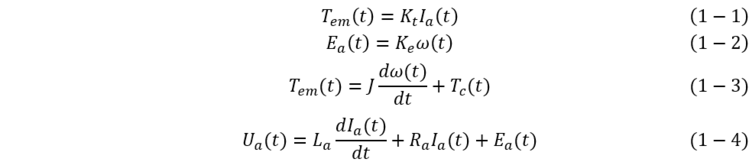
对上述式子去拉普拉斯变换并整理得:

其中
T
c
T_c
Tc为电机轴上的总阻转矩。画出电机的系统传递函数框图:

代入相应数据后,结合实际情况,我们考虑使用如下改进从而进一步增加实用性。

将其封装作为一个子模块如图:
H桥原理
H桥电机驱动电路的核心包括4个MOSFET管和1个电机,如下图所示。
电路工作原理如下:为了使电机运转,必须导通对角线上的一对MOSFET管。根据不同MOSFET管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。当Q3管和Q6管导通时,电流从电源正极经Q3从左至右穿过电机,再经Q6回到电源负极,该流向的电流将驱动电机顺时针转动。当MOSFET管Q4和Q5导通时,电流将从右至左流过电机,驱动电机逆时针转动。通过控制PWM波形的占空比,达到对电机调速的目的。我们使用单极性PWM波和方向信号控制电机的转速和转向。

H桥左边的附加电路的作用是方便单极性PWM波控制H桥4个MOSFET管的通断。其中V_GND模块是测量电路中该点相对GND的电势。分析可知通过R1,R11的上拉,电路在附加电路的MOSFET管未导通时,输出高电平。所以Dir1,Dir2输入端口输入LOW,HIGH信号即可使Ua端口输出正值。
电路中所有的N沟道MOSFET饱和导通电压阈值为1v,P沟道MOSFET饱和导通电压阈值为-1;H桥中的二极管起到续流的作用。附加电路的二极管的作用是保证只接受正电压。
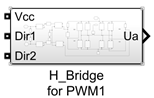
我们将该电路封装成一个子模块如下图。其中Vcc是电机能达到的最大工作电压。
方向信号控制原理
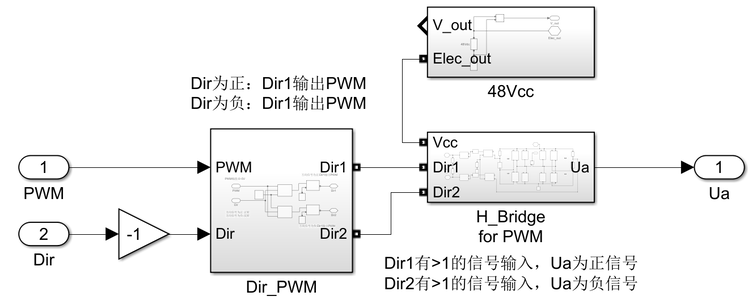
如图,方向信号为正时只有Dir1会输出PWM信号,而Dir2端口输出低电平信号。同理,方向信号为负时,只有Dir2会输出PWM信号,Dir1端口输出低电平信号。结合H桥及其附属电路模块,我们可以用Dir信号控制电机转动方向。
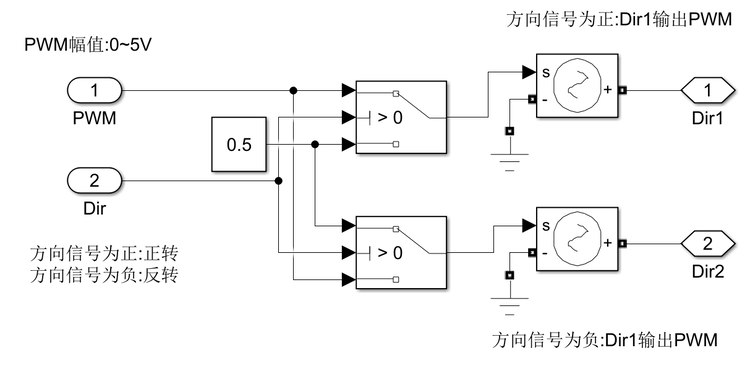
我们上图封装成一个子模块如下图:

电机驱动模块原理
结合方向模块和H桥及其附属电路模块,我们得到电机驱动的模块。接上48V的Vcc后,我们得到如下图模块。
我们将其封装成子模块如图:
PWM生成原理
在本次模拟实验中,我们直接使用simulink中的一个PWM模块:
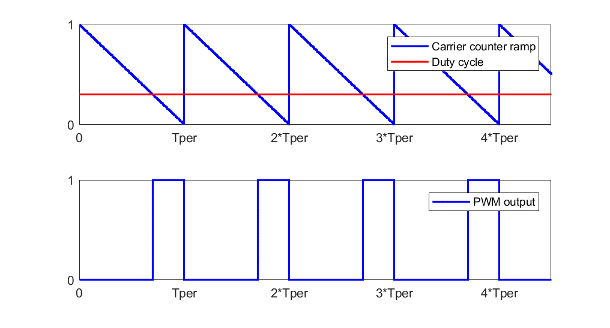
它的原理是:
我们输入一个阈值DC,选择载波类型(单边锯齿波和双边锯齿波)。然后当高于DC的时刻就输出低电平,低于阈值的时刻就输出高电平。这里我们选择上升沿的单边锯齿波(如上图)。由于载波的幅值为1,所以我们的阈值就是占空比值。载波的频率就是我们PWM波的频率。
最后,我们需要将PWM波的幅值变换到0~5V,以便我们控制使用。
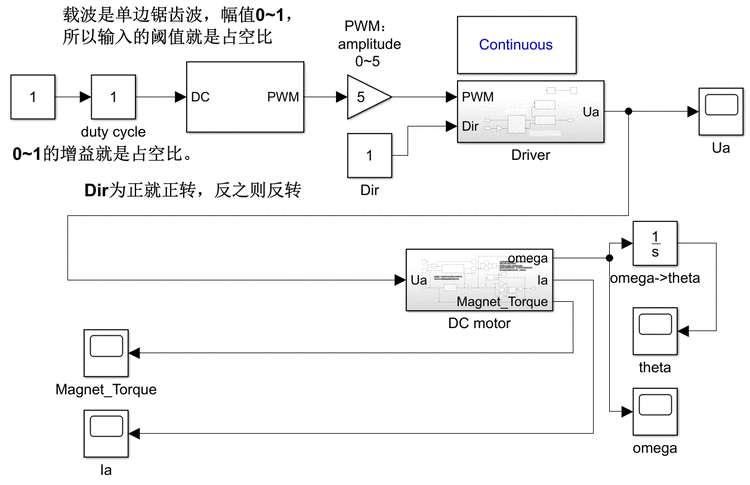
电机仿真总模型
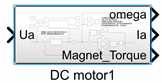
综上,我们得到了PWM驱动的直流电机的仿真图(如图1.12)。输入PWM波(通过调节duty circle来调节占空比的值)和方向信号(输入正值就正转,负值就反转),可以通过Scope观察各个输出量的信号。
其中theta是转过的角度,omega是转动的角速度,Magnet_Torque是产生的电磁力矩(减去阻力矩之前的值),Ia是电机的电流,Ua是电机的外部输入电压。
所分析的直流电机,
k
e
=
k
t
=
1
V
/
(
r
a
d
/
s
)
k_e=k_t=1V/(rad/s)
ke=kt=1V/(rad/s),R=1.6欧,L=16mH,驱动电压48V,轻负载时转动惯量
0.02
k
g
⋅
m
2
0.02kg\cdot m^2
0.02kg⋅m2,重负载时转动惯量
0.4
k
g
⋅
m
2
0.4kg\cdot m^2
0.4kg⋅m2,轻载时阻力矩
1.6
N
⋅
m
1.6N\cdot m
1.6N⋅m,重载时阻力矩
8
N
⋅
m
8N\cdot m
8N⋅m。PWM开关频率16kHz。
simulink源文件供下载
文中分析的模型完全可以自己搭建。所有部分均已提及。另外MATLAB自带有PWM调制的直流电机模型,不过直流电机模型是一个模块实现。本文是通过传递函数实现。
这里是simulink的源文件供下载,使用的是MATLAB2018a
标签:MOSFET,信号,电机,simulink,电路,模块,脉冲调制,PWM
来源: https://blog.csdn.net/tjh7808/article/details/111641820







 京公网安备 11010802041100号
京公网安备 11010802041100号