本文将分享来自UC Berkeley的工作:基于动态关系推理的多智能体轨迹预测问题。
公众号:将门创投(thejiangmen)作者:加州大学伯克利分校在读博士生 李家琛 卡内基梅隆大学在读硕士生 杨帆
多智能体交互系统在生活中随处可见,从纯物理学系统到复杂的社交网络都可以被囊括其中。在许多应用领域,对环境情况的有效理解以及对交互中个体行为与轨迹的准确预测起着至关重要的作用。
本文提出了一种通用的用于多智能体轨迹预测的算法,可以显式地对个体间的动态交互关系进行有效地识别并基于此进行多模态的长期预测。研究人员用多个不同领域的数据集对模型进行了测试,并在与目前最先进的算法的比较中取得了最优的效果。
论文链接:https://arxiv.org/abs/2003.13924
项目链接: https://jiachenli94.github.io/publications/Evolvegraph/
轨迹预测最新论文,代码及数据集集锦:
https://github.com/jiachenli94/Awesome-Interaction-aware-Trajectory-Prediction
一、背景与挑战
复杂的多智能体交互系统在我们的生活中是十分常见的,例如多粒子交互的物理系统,日常交通中车辆与行人,球场上处于合作或对抗关系中的球员等。在这些场景中,对于其中每个个体未来轨迹的准确预测经常起着至关重要的作用。
这类系统的特点之一是每个个体之间会存在多种多样的关系,并且这些关系也会随着时间不断地演变。另外,每个个体的未来运动轨迹很可能存在着多模态的特点——即不同种类的未来运动轨迹,例如一辆车在交叉路口可能直行也可能转弯。忽略关系推理的传统轨迹预测方法难以在如此复杂系统之上取得很好的效果。
针对此问题,Thomas Kipf等人在《Neural relational inference for interacting systems》一文中提出了一种基于图神经网络的模型对关系进行推断(以下简称NRI模型),并基于这种推断进行对未来轨迹的预测。但他们的算法难以应对不断演变的关系,尤其是关系突然改变的情况,同时也无法处理智能体行为存在多模态的情况,然而上述两点在诸如自动驾驶等问题中十分关键。
我们提出了一种名为EvolveGraph动态演化关系图的算法,能够有效地捕捉和预测多个智能体之间关系的变化,并且根据此关系预测未来的运动轨迹,同时能有效体现物体轨迹的多模态特点。我们在物理系统、自动驾驶场景、篮球运动员及行人数据集上验证了我们的算法,并且取得了比现有的最先进的算法更好的效果。
二、EvolveGraph算法框架
我们采用图结构表示多智能体系统,构建了全连接观测图 (observation graph) 并使用图中的节点和边的属性 (node/edge attribute) 来表征观测到的信息。基于观测图,我们在隐空间 (latent space) 中学习关系图 (interaction graph) 来表征针对每对智能体之间关系的推断。
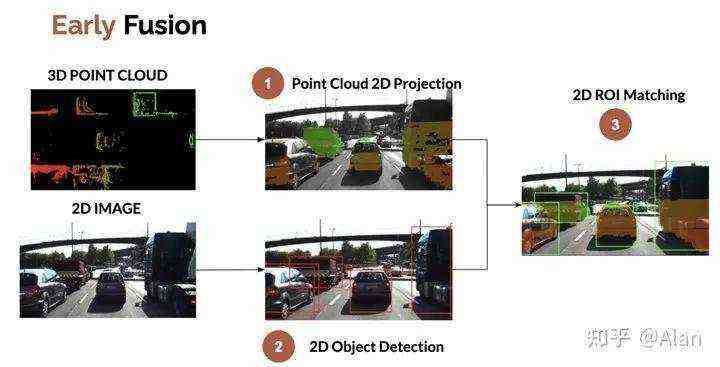
算法主要分为三部分,静态关系推断(static interaction graph encoding),动态关系演变(interaction graph evolution)以及基于推断关系的轨迹预测 (decoding),如Figure 1所示。
Figure1. EvolveGraph概要模型图1. 静态关系推断
观测图包含对应每个智能体的节点和一个环境节点,每个节点之间全连接表示他们之间可能存在关系。
算法第一步需要提取每个节点在观测图中的特征,每个节点可以根据自己的历史轨迹和环境信息获得自身属性 (self-attribute),同时可以根据所有相邻节点的信息获得出其社会属性(social-attribute)。两相结合可以用于更新自我节点的属性。
上述过程可以循环多次以提取更深层次信息,在实际操作中,一次该操作即可将全连接图的信息传递到任意一个节点,完成一次完整的特征提取。基于一对节点的属性可以更新二者之间边的属性,基于边的属性可以进行两节点之间关系的推断。
将该边的属性送入softmax函数,即可得到该两节点之间关系类别的概率分布,即该关系属于L种可能的关系类别中每一种的概率。整个关系推断的过程,既可以基于已知的历史轨迹,也可以基于模型输出的最新预测结果,用于做进一步的长期轨迹预测。
2. 动态关系演变
EvolveGraph采用循环神经网络GRU对关系图的演变进行建模。将不同时间步的静态关系推断得到的结果依次输入GRU网络中,使之能够根据过去关系的历史以及对当前最新关系的推断,获得未来关系可能的发展情况,为后续基于关系推理的轨迹预测奠定基础。
3. 基于动态关系的预测
针对每一种可能存在的关系类型,模型之中均有一种与之对应的全连接网络用于获取在这种关系下两节点之间的相互影响,其输入是两节点的属性。
针对某个特定节点,首先计算所有关系图中相邻节点的产生的影响,然后将其相加并与自己本身的信息一起送入循环神经网络,即可预测该个体未来的轨迹。
对未来轨迹的预测是基于高斯混合模型的多模态分布,用于表征未来可能发生的多种模态下的运动轨迹。
4. 动态关系图与多模态的联系
不同模态下的运动常常伴随着不同的关系。例如,汽车直接通过十字路口可能是因为其他车辆在避让它,而汽车停在十字路口前等待可能是因为需要避让其他车辆,不同的交互关系会导致不同的结果,进而影响汽车的运动轨迹。
因此,一方面动态图的引入为对更复杂多样的模态的建模提供了帮助;另一方面,多模态算法的引入也使得动态图在训练过程中避免或缓解多种可能性坍缩成一个平均结果的情况,并且能够更大程度地获得具有多样性的预测结果。
三、实验结果
我们在多个数据集上验证了EvolveGraph算法并取得了与现有方法相比更好的预测效果。数据集涉及的应用领域覆盖了动态物理系统,车辆行人以及篮球运动员等。下面主要介绍在动态物理系统和车辆行人领域的部分结果,以预测误差和可视化的方式呈现,更多有趣的结果和细节详见论文。
1. 动态物理系统
我们设计了一个由三个粒子构成的动态系统,初始时所有粒子均处于x轴上方并且被一个刚性星型杆连接,系统整体具有随机初始速度和初始角速度,当某个粒子的轨迹穿越x轴时,刚性杆立刻消失,所有粒子开始以当前的速度进行匀速直线运动,在Table 1中用“Change”表示。
我们期望EvolveGraph模型可以从只包含轨迹观测的训练集中学到粒子间关系变化的规律,并且可以进行准确的长时间预测。为了增强完整性,我们也在粒子关系不变的系统上进行了实验,即刚性杆始终存在的情况,在Table 1中用“No change”表示。
我们在Table 1中展示了对粒子关系的识别准确率。我们先采用有监督学习 (supervised learning) 的方法训练,因其效果最好将其当作“Gold Standard”。然而在实际问题中是获取不到真实的交互关系 (ground truth) 的,所以有监督学习的方法并不适用。除此之外,跟其他baseline方法相比,EvolveGraph可以达到最高的准确率。
我们在Figure 2中展示了隐空间关系图演变过程以及粒子的运动轨迹。在上方的heatmap中,颜色越深表示粒子间有边相连的概率越大,从某一时刻起刚性杆(边)消失,真实的变化时间用白色字体标出。
从结果可以看出EvolveGraph可以及时准确地预测粒子关系的变化。从下方的粒子轨迹图中可以看出,EvolveGraph预测的轨迹与真实轨迹非常相似,一定程度上也体现出动态关系推理的重要性。
Figure 3展示了粒子轨迹预测的误差比较,可以看出随着预测时间的增长,EvolveGraph (dynamic) 的优势越来越明显。
Figure 2. 隐空间关系图演变过程及粒子运动轨迹Figure 3. 粒子轨迹预测的误差比较2. 车辆与行人
我们也在交通场景的数据集上进行了实验,并与最先进的模型如STGAT (ICCV 2019),Social-STGCNN (CVPR 2020), Trajectron++ (ECCV 2020) 等进行了比较,如Table 2所示。
结果显示EvolveGraph可以达到最小的预测误差,在长期预测 (4s) 中的提升更为显著。Figure 4展示了两个典型的测试场景,从预测的轨迹分布图中可以看出,真实轨迹均位于预测分布中概率最高的区域,并且预测分布具有多模态的特点。
例如,在 (b-1) 中,位于下方的车既有可能继续保持在转盘道内行驶,也有可能驶离转盘道,我们的模型可以同时预测出两种不同的可能,生成具有多模态的轨迹分布。
Figure 4. 车辆及行人轨迹图四、总结与展望
本文主要关注的是基于动态关系推理的多智能体轨迹预测问题,文中提出的算法框架具有一定的普适性,可以扩展应用到多个不同领域。目前文中提到的系统均为个体数量相对较少的系统,但该算法也具备扩展到大规模交互系统的潜力,如复杂物理系统仿真,大规模交通路网等,这也得益于图神经网络的发展与应用。
//
作者介绍:
李家琛,加州大学伯克利分校 (UC Berkeley) 五年级博士生,导师为Prof. Masayoshi Tomizuka。他的研究方向包括机器学习,图神经网络,计算机视觉等方法,以及它们在自动驾驶,多智能体关系推理,行为预测和决策规划等问题中的应用。本文的工作是在Honda Research Institute的实习期间完成的。
更多信息请访问个人主页:https://jiachenli94.github.io/
杨帆,卡内基梅隆大学 (Carnegie Mellon University) 机器人研究所一年级硕士生,清华大学本科2020年毕业,2019年曾在UC Berkeley交换。他的研究方向包括机器人抓取,强化学习,策略迁移,鲁棒控制等。
更多信息请访问个人主页:https://sites.google.com/view/fanyang98/home-page
-The End-
@将门创投· 让创新获得认可
如果喜欢,别忘了赞同、关注、分享三连哦!笔芯❤





 京公网安备 11010802041100号
京公网安备 11010802041100号