作者:邓尕恒_789 | 来源:互联网 | 2023-09-16 14:02
找了很多单片机和蓝牙模块的资料,根据自己已完成的经验简单说明下,希望帮助有理想又能坚持的人做出自己想要玩具。 孩子捡到一个Q7遥控车,用5节5号电池带差速,质量还不错。可没遥控器怎么办,总不能再去捡个
找了很多单片机和蓝牙模块的资料,根据自己已完成的经验简单说明下,希望帮助有理想又能坚持的人做出自己想要玩具。
材料:
//后电机
const int Spotlight = 12 ;//大灯
boolean TaillightState;
void setup() {
pinMode(MA01, OUTPUT);
pinMode(Spotlight, OUTPUT);
}
void loop() {
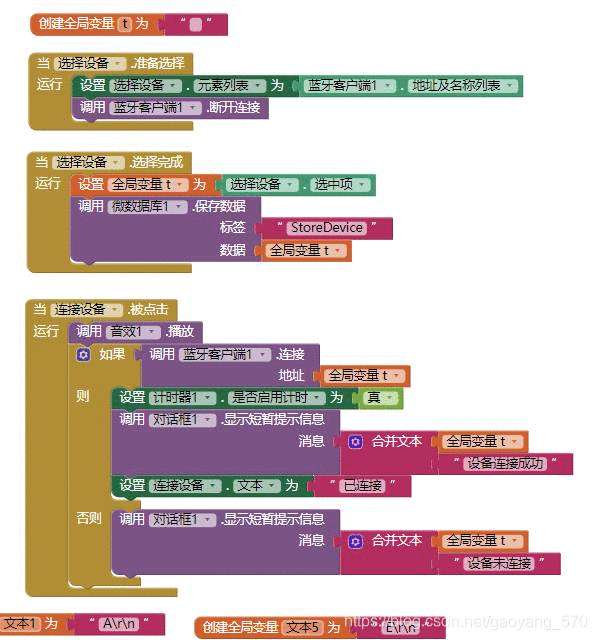
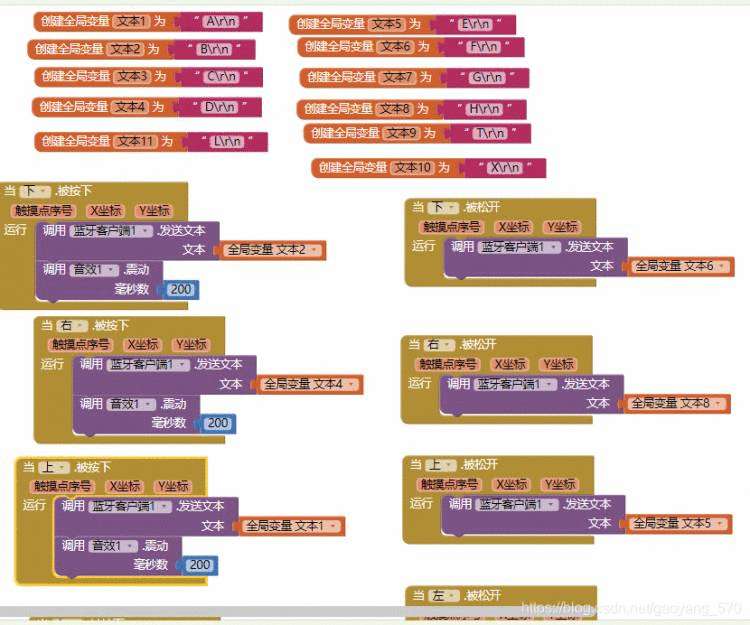
动下脑筋差不多就能理解代码的意思,需要说明的是,每个信号都有2个按键定义,分别是按下和松开的状态。
下面是我自己搭的app,适合装13,其实是为孩子玩方便,麻烦一点点也值得!
总觉得用Arduino做这么个东东太委屈它了。第二套方案是啥呢?其实是我最先想到的,应该是第一套方案吧。CC2541是集51单片机和低功耗蓝牙为一体的小东东,真的很小,我觉得更适合这种玩具应用,可软件方面感觉复杂些,至少我还要好好的学习一阵,资料也不多,很希望有朋友能带带我。拜托了!




![[译]技术公司十年经验的职场生涯回顾](https://img8.php1.cn/3cdc5/24912/711/b6574f3292f9dc00.png)






 京公网安备 11010802041100号
京公网安备 11010802041100号