作者:教坏的黑天使_203 | 来源:互联网 | 2023-07-26 12:52
篇首语:本文由编程笔记#小编为大家整理,主要介绍了自动驾驶技术之——无人驾驶中的CAN总线相关的知识,希望对你有一定的参考价值。
CAN总线在整个无人驾驶系统中有着十分重要的作用。除了在VCU信号需要通过CAN总线进行传输外,无人车上的某些传感器(如雷达、Mobileye)的信号传递也是通过CAN实现的 。
前言
本文主要内容是——无人驾驶中的CAN(Controller Area Network )总线。
CAN总线在整个无人驾驶系统中有着十分重要的作用。除了在VCU信号需要通过CAN总线进行传输外,无人车上的某些传感器(如雷达、Mobileye)的信号传递也是通过CAN实现的。
我在无人驾驶,个人如何研究?中提到过
实现一个无人驾驶系统,会有几个层级: 感知层 → 融合层 → 规划层 → 控制层 更具体一点为: 传感器层 → 驱动层 → 信息融合层 → 决策规划层 → 底层控制层
“传感器层”在之前的分享中已经介绍过了,这次主要介绍的是“驱动层”相关的内容。
正文
CAN通信是一套高性能、高可靠性的通信机制,目前已广泛应用在汽车电子领域。有关CAN的总线的原理及特性并不是本次分享的重点。本文的重点在无人驾驶系统获取到CAN消息后,如何根据CAN协议,解析出想要的数据。从CAN总线中解析出传感器的信息,可以说是每个自动驾驶工程师,甚至每一个汽车电子工程师必备的技能。
认识CAN消息
以百度推出的Apollo开源的代码为例做CAN消息的讲解,我们先看到每一帧的CAN消息是如何被定义的。
可以看到这个名为CanFrame的消息结构中包含4个关键信息,分别是:
1. uint32_t id
CAN消息的ID号。
由于CAN总线上传播着大量CAN消息,因此两个节点进行通信时,会先看id号,以确保这是节点想要的CAN消息。最初的CAN消息id号的范围是000-7FF(16进制数),但随着汽车电控信号的增多,需要传递的消息变多,信息不太够用了。工程师在CAN消息基础上,扩展了id号的范围,大大增加了id号的上限,并将改进后的CAN消息称为“扩展帧”,旧版CAN消息称为“普通帧”。
如果拿写信做比较,这个id就有点类似写在信件封面上的名字。
2. uint8_t len
CAN消息的有效长度。
每一帧CAN消息能够传递最多8个无符号整形数据,或者说能够传递8*8的bool类型的数据。这里的len最大值为8,如果该帧CAN消息中有些位没有数据,这里的len就会小于8。
3. uint8_t data[8]
CAN消息的实际数据。
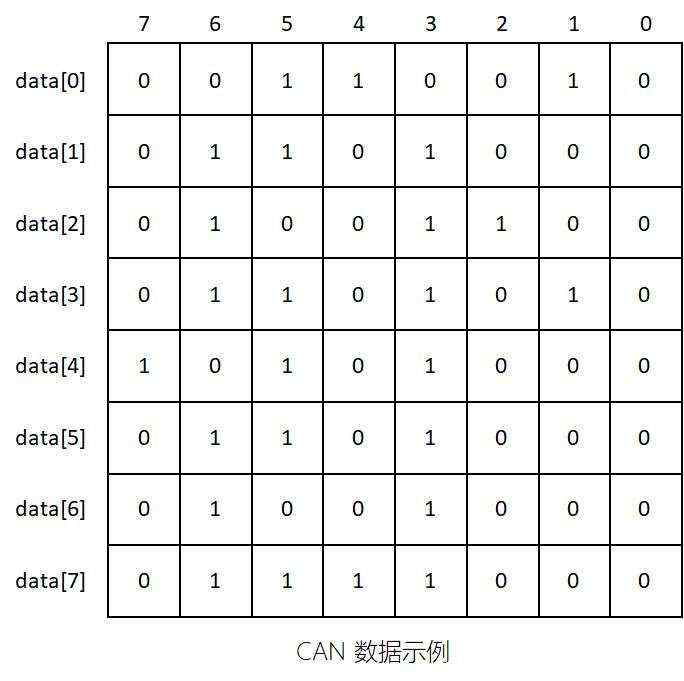
正如刚才提到的,每一帧CAN消息都包含至多8*8个bool类型的数据,因此可以通过8*8个方格,可视化CAN消息中的data。如下图所示:
在没有CAN协议帮助我们解析的情况下,这里的数据无异于乱码,根本无法得到有用的消息,这也是CAN消息难以破解的原因之一。
4. timestamp
CAN消息的时间戳。
时间戳表示的是收到该CAN消息的时刻。通过连续多帧的时间戳,可以计算出CAN消息的发送周期,也可以用于判断CAN消息是否被持续收到。
综上,每帧CAN消息中最重要的部分其实是data,即8*8的bool值。所谓解析CAN消息,其实就是解析这8*8个bool类型的值。
认识CAN协议
目前业界的CAN协议,都是以后缀名为dbc的文件进行存储的。德国Vector公司提供CANdb++ Editor是一款专门用于阅读dbc文件的软件。
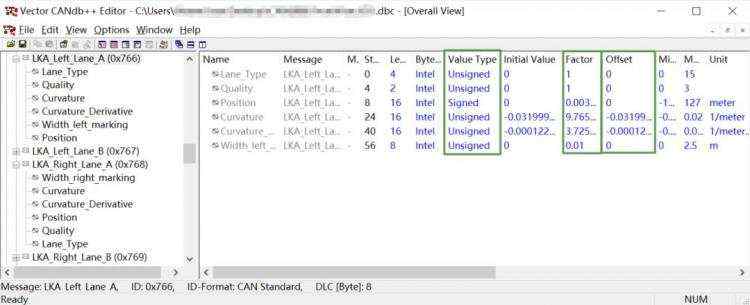
如下图所示,为Mobileye提供的车道线的dbc文件。(文末提供CANdb++ Editor安装包和Mobileye车道线的dbc文件的获取方法)
以id号为0x766的LKA_Left_Lane_A为例,这是Mobileye检测无人车左侧车道线的部分信息,包括了左侧车道线的偏移量,曲率等。该帧CAN消息(Message)中的五个信号(Signal),分别是Lane_Type、Quality、Curvature、Curvature_Derivative、Width_left_marking、Position。
每个信号的具体描述显示在软件右侧,其中与解析直接相关的三个要素已用绿色框选中。
1. Value Type(Unsigned或Signed)
某些物理量在描述时是有符号的,比如温度。而描述另外一些量时,是没有符号的,即均为正数,比如说曲率。
2. Factor 和 Offset
这两个参数需要参与实际的物理量运算,Factor是倍率,Offset是偏移量。例如Lane_Type和Quality信号的Factor为1,Offset为0,而其他信号的Factor均为小数。具体的计算方法请往下看。
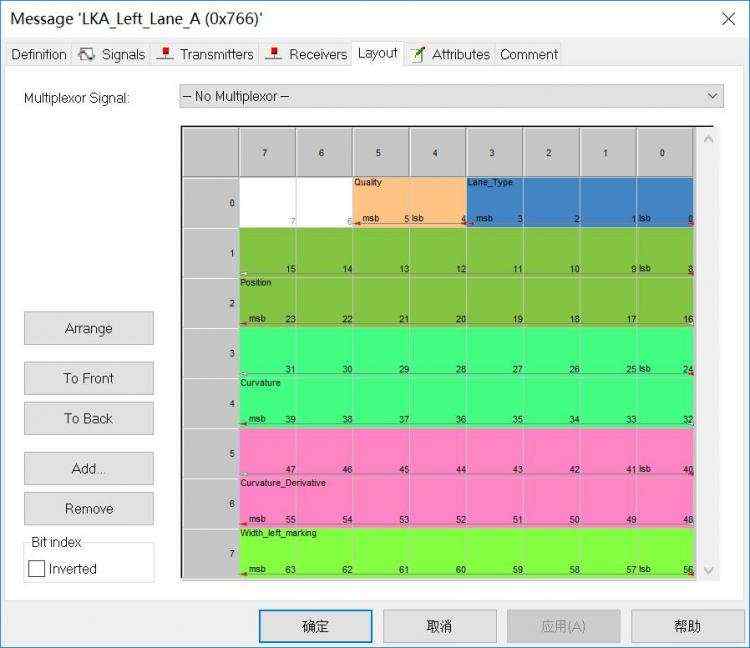
双击LKA_Left_Lane_A,打开Layout页,会发现很熟悉的方块阵列,如下图所示。
工程师真正关心的恰好是这块彩色图,因为该图上的每个小方块和data中的每一个bool量一一对应。这就是CAN协议的真面目。
解析CAN信号
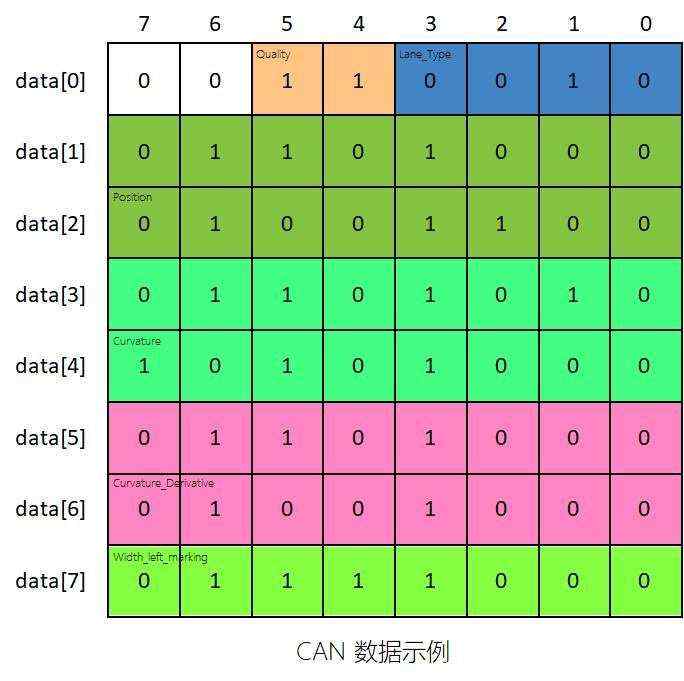
由于彩色方块图与data是一一对应的,我们将两个图叠加,将得到如下图所示的data图。
每个信号物理量的计算公式为:
1.Factor为1的物理量
由于Lane_Type和Quality的Factor为1,Offset为0,因此十进制值为多少,实际物理量即为多少。
从图中就能直接看出Quality这个信号占据两个位,二进制数11,换算为十进制是3(1*2 + 1*1);Lane_Type占据四个位,二进制数为0010,换算为十进制是2(0*8 + 0*4 + 1*2 + 0*1)。
所以这一帧信号表示此时的左车道线Lane_Type值为2,Quality值为3。对于整数值,通信双方可以约定规则,比如Mobileye就规定了,Quality为0或者1时表示车道线的置信度较低,不推荐使用此时的值;2表示置信度中等,3表示置信度较高,请放心使用。
2.Factor为小数的物理量
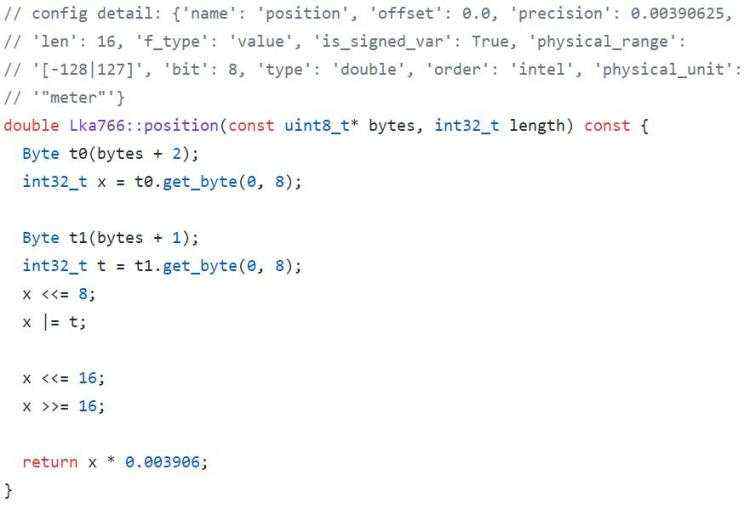
对于Factor不为1的物理量,比如Position,需要使用移位的方法进行解析,但解析公式保持不变。以百度 Apollo提供的源码为例进行讲解。
这里的bytes即为CAN消息中的data,首先将Position信号所在的行取出来,将第1行的8个bool值存储在变量t1中,将第二行的8个bool值存储在变量t0中。由于在这条CAN消息中,Position同时占据了高8位和低8位,因此需要将第一行和第二行的所有bool位拿来计算,高8位存储在32位的变量x中,低8位存储在32位的变量t中。
现在需要将高8位和低8位拼接,将高8位左移8位,然后与低8位求或运算,即可得到Position的二进制值。随后进行的左移16位,再右移16位的操作是为了将32位的变量x的高16位全部初始化为0。之后将x乘以Factor再加上Offset即可得到真实的Position值,给真实值加上单位meter,即可获取实际的物理量。
与CAN类似的通信协议
VCU、雷达等通过CAN总线传递信号,随着CAN的负载越来越高,很多传感器选择了其他通信方式。比如激光雷达的点云数据量太过庞大,使用的是局域网的方式进行传递;再比如GPS和惯导使用的是串口进行通信。
虽然通信方式和通信协议千差万别,但解析的方法都是一样的。
结语
好了\(^o^)/~,这篇分享的内容基本上讲清楚了CAN总线消息的解析过程。这是无人驾驶系统传感器驱动层的基本理论。
由于不同ID的CAN消息的结构不一样,因此在写解析代码时,需要十分仔细,否则会给后续处理带来想不到的bug。
如果你对CAN总线的解析还有什么疑问,可以在评论区与我互动。
感谢各位关注IEEE IV 2018大会,该网盘照片是IEEE IV 2018的现场照片,按照时间排序,从6月25日开始注册到6月30日结束,分为签到注册、workshop、IPDA、IV现场、学生活动、融合论坛、晚宴、海报会场、展会、联合路演等部分,如有需求请自行查阅。链接:https://pan.baidu.com/s/1Cr5DQrkFn-8SvBRleibXpQ 密码:6bct
【扫描二维码,备注公司+姓名,邀您进入智车科技社群,一起探讨自动驾驶】
推荐阅读
▼





 京公网安备 11010802041100号
京公网安备 11010802041100号