路侧感知就是利用摄像机、毫米波雷达、激光雷达等传感器,并结合路侧边缘计算,其最终目的是实现对该路段的交通参与者、路况等的瞬时智能感知。
路侧感知能拓展自动驾驶车辆和驾驶员感知范围,并通过V2X车路协同技术实现人-车-路-云的一体化运行监测,第一时间发现道路通行异常,实现车路协同、车云协同,区域路云协同等智能应用,满足自动驾驶车辆、社会车辆智能出行需求,同时它能使监管机构变得更加高效灵活,从而建立一个响应速度更快、更加灵活的监管环境。
01 路侧感知的功能
针对自动驾驶车辆,路侧感知将增强其感知能力,有效弥补单车智能的感知盲点,让自动驾驶由过去的单兵作战转变为有组织的高效协同合作。
在自动驾驶感知、决策层面技术痛点无法短时间突破背景下,行业正由单车智能走向协同智能,也将推动自动驾驶产业加速成熟,最终形成低成本的自动驾驶。
针对普通社会车辆,路侧感知将给其赋能高级辅助驾驶功能。通过路侧雷达、摄像头等传感器采集汽车周边、前方较远距离的环境数据,进行静态、动态物体的识别、跟踪,控制系统结合 地图数据做出行为决策,使驾驶者觉察可能发生的危险,从而有效提升驾驶安全性与舒适性。
社会车辆通过安装车路协同app或者观察道路侧的交通信息指示牌,即可体验部分功能,获取视距范围外的实时路况信息,提前根据需要减速或调整路线,以达到降低交通隐患、舒适出行的目的。
路侧感知数据接入交警数据平台,可将原始数据和本地处理的结果上传云端,通过对海量交通运行数据进行整合处理,形成分析预测模型,运用于交通调度引导、线路规划和车辆管控等方面,推动道路基础设施要素资源全面数字化、“人车客货”互联互通,用数据管理和决策为车辆的运行与监管提供全方位的支持,为提升高速公路的交通效率提供了有效的解决方案。
02 路侧感知应用场景
通过对不同类型的路段进行路侧感知会得到相应的应用场景,这些应用场景不但能够保证车辆安全通行的需求,同时还能够满足智能网联车辆或自动驾驶车辆的测试需求。立足于不同路段的交通流特点及其延申出来的痛点分析结果,我们将路侧感知应用场景划分为智慧高速道路和智慧城市交叉路口两个主要的应用板块。
智慧高速解决方案中,路侧感知相关主要场景如下:
智慧城市解决方案中,路侧感知相关主要场景如下:

03 路侧感知系统框架
整个路侧感知融合系统主要由路侧感知传感器和边缘计算单元组成,具体如下图所示。
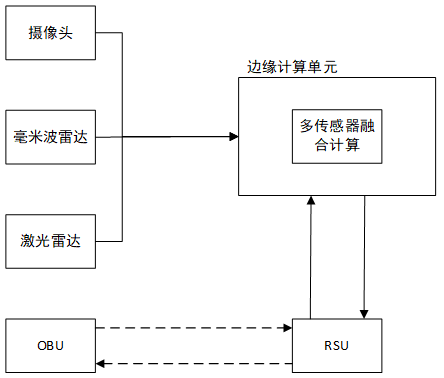
图 路侧多传感感知融合系统组成
目前,在融合体系的数据源部分,常用到的传感器有摄像头、毫米波雷达和激光雷达。
-
摄像头能够检测交通参与者类型(比如行人、车辆、骑行者)等信息,但是其受天气、光照强度的影响较大
-
毫米波雷达能够准确地检测目标的位置、速度等信息并且不会受天气状态的干扰,但是其容易漏检静止的目标,而且检测的目标噪点较多;
-
激光雷达能够准确检测出静止和运动目标的位置、速度以及目标物的尺寸等信息,但是其环境敏感度高,易受大雪、灰尘影响。
通过将多种传感器的数据融合能够结合不同传感器的优点,起到扬长避短的效果。
边缘计算单元通过CAN、Ethernet等接口获取摄像头、毫米波雷达、激光雷达的原始数据,同时也包括了RSU通过空口采集到的网联车辆信息数据,然后通过多传感器数据融合软件系统即可计算出整个道路上的交通参与者的信息。
路侧多传感器数据融合软件系统主要分为两层:传感器层和融合层。
- 传感器层主要工作包括:数据采集、目标识别、目标定位等步骤。
数据采集采集原始数据(点云,图像等);目标识别是指通过机器学习或者深度学习算法获得目标类型;目标定位是指通过特定算法对感知区域内的目标进行标定,得到检测目标在传感器相对坐标系坐标到大地坐标系下坐标的转换关系。
- 融合层将从传感器层获得目标的特征信息进行数据同步、目标关联、目标匹配、状态估计和目标跟踪,从而获得不同天气、不同光照环境下交通参与者的精确位置、速度、类型、尺寸等信息,并将这些信息通过约定接口和协议发送给路侧单元RSU。
RSU能够获取边缘计算单元融合后的所有交通参与者的信息,通过V2X通信方式将整个路口或者道路上的交通参与者信息发送给周围的智能网联车辆。
04 局部动态地图LDM
局部动态地图LDM是智慧道路中的核心组成模块,是基于路侧感知输出与静态高精地图等数据的直观呈现形式,也是将各渠道获取的数据经过复杂的检测算法与预处理流程后进一步提炼和融合后生成的动态数据集合,能够实时反馈当前道路的交通态势感知结果,可为RSU的综合决策提供有效的数据支撑。
如下图所示,LDM数据由四层组成,第一层静态数据(基本不变的数据,如静态地图)、第二层是准静态数据(一段时间内不会变化的数据,如树木、建筑物、道路)、第三层是暂态数据(短时间内会变化的数据,如交通事故现场、天气)、第四层动态数据(变化频率很高的数据、如当前道路车辆状态信息)。
智慧道路路侧系统根据当前道路状态生成实时的LDM,通过V2X技术可以将LDM直接传递给自动驾驶车辆或网联车辆,实现更可靠的单车智能车路协同感知,并能够大幅提升车辆行驶的安全性。
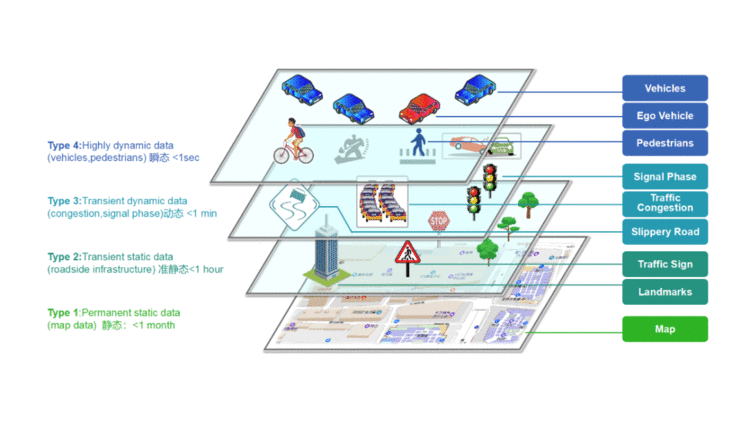
图 LDM
实际操作时,第一、二层数据主要涉及一些地图本身相关的各参考点坐标信息,具体涵盖内容需要视呈现复杂程度和场景需求而定,通常由具有相关资质的图商提供,由路、云协同负责相关数据的更新和下发。
如只考虑路口协作网联交互场景,则只需要详细车道、停止线等信息,而若需要给自动驾驶车辆提供支持或进行云端全息感知态势呈现,则需要提供树木、标牌、建筑物等完备信息。
第三层数据由RSU从路侧直接采集,如信号灯相位的更新和变化、气象传感器感知的事件,该层数据更新慢,将以事件触发的形式进行相关数据库的更新;
第四层则为边缘计算单元融合、跟踪等一系列处理下的参与者信息,更新频率与传感器数据输出频率和路侧边缘计算算力强相关,边缘计算单元输出的目标结果将以既定格式插入(新增事件)或更新(变化事件)该层数据库。
考虑到目前传感器技术和实际需求等因素,该层建议更新频率为50ms。
LDM可用于路口态势呈现,路侧也可以LDM为基础进行相关场景的预判,为保障效果,路侧感知融合需要保证下列几点:
1、感知体系覆盖跟踪模块,保障同一感知目标输出ID基本不变;
2、数据库增、删、改、查机制完备,不“残留”消失目标,也不会在偶尔丢帧时出现目标闪烁;
3、需要结合单目标历史数据进行态势分析,避免出现“回退”、“抖动”等不正常效果,尤其是航向角计算,避免出现车辆因为GPS小幅跳变而引起的航向角剧烈波动的现象;
4、为进行场景协同计算,需要引入车辆动力学模型,避免将车辆作为普通刚体而产生的误告警输出结果;
作者简介:张长隆,博士、副教授。
首创“三模式”(LTE、LTE-V、DSRC)自适应智能网联V2X设备与系统;全国首个长沙开放道路智慧公交车路云协同系统设计者;全国首个长沙开放高速道路路侧全息感知与车路协同系统设计者;全国首个大规模车路协同公交优先系统设计者;中国首个智能网联标准《合作式智能运输系统车用通信系统应用层及应用数据交互标准》执笔人之一 。
README
本站文章引用或转载写明来源,感谢原作者的辛苦写作,如果有异议或侵权,及时联系我处理,谢谢!
更多车路协同,车路协同建设解决方案,参考链接:https://gitee.com/AiShiYuShiJiePingXing/smart-city










 京公网安备 11010802041100号
京公网安备 11010802041100号