1 Recipe of Deep Learning
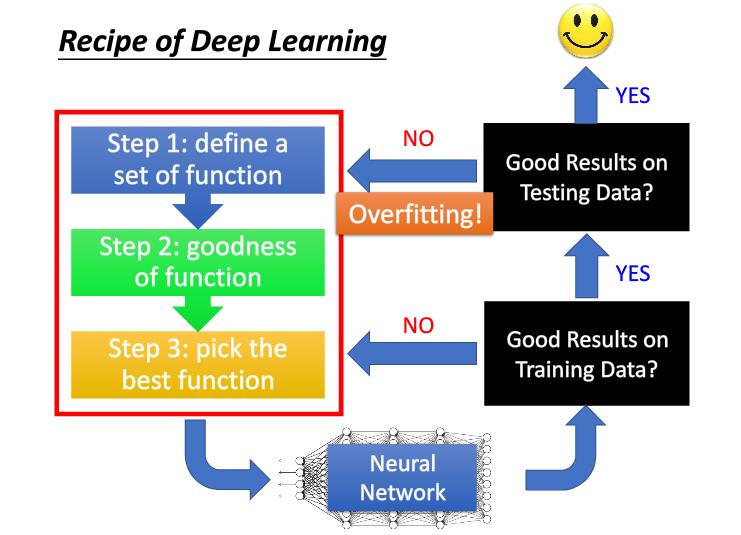
我们在搭建与训练神经网络的时候最好使用上图步骤:
- 快速搭建好神经网络模型
- 看训练集上有没有好的结果,如果有那么执行3,如果没有高偏差执行4
- 看测试集上有没有好的结果,如果有执行6,如果没有高方差执行5
- 选择更好的模型,如增加网络的深度,增加迭代次数,改变学习率等
- 因为过拟合,所示使用如regularization,EarlyStopping,Dropout,增大数据集等方法
- 训练完成
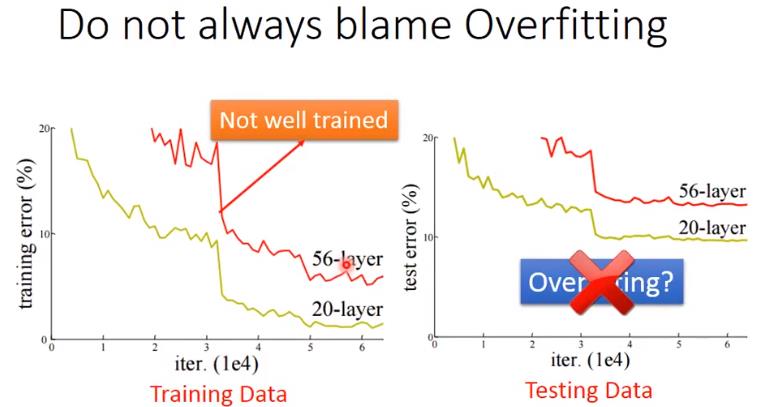
因此我们在训练集上测试不理想的时候,不能首先就 认为是因为overfitting,也有可能是训练集上的训练结果就不好。如下图,56层的神经网络在测试集上的准确率没有20层好,但我们不能说是因此overfitting的原因,也有可能是训练集上56层的没有训练好。
2 Good Results on Training Data? 2.1 New activation function
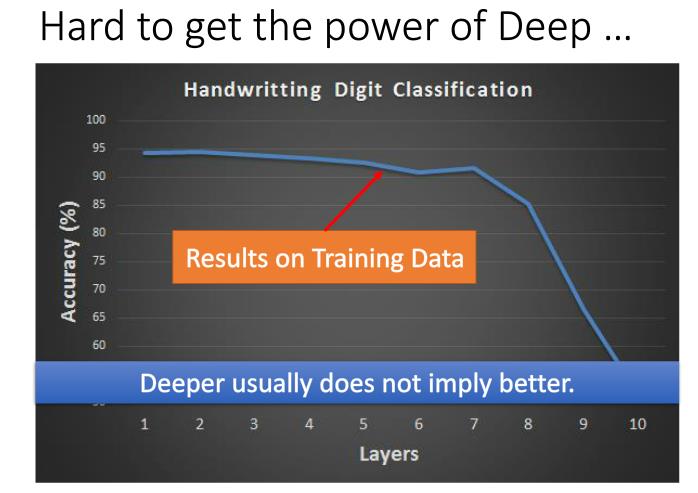
之前激活函数一般是sigmoid函数,对于训练集,神经网络更深的深度不代表有更好的结果,如上图,当神经网络深度为7层的时候,准确率就开始逐渐下降。
梯度消失问题
 如上图,靠近input的参数对最后loss functiong的微分值比较小,但靠近output的参数的微分值比较大。所以靠近input的参数跟新很慢,而靠近output的参数跟新很快,最终靠近input的参数几乎还是随机的,没有学到东西。
如上图,靠近input的参数对最后loss functiong的微分值比较小,但靠近output的参数的微分值比较大。所以靠近input的参数跟新很慢,而靠近output的参数跟新很快,最终靠近input的参数几乎还是随机的,没有学到东西。
对于神经网络,梯度表示当前参数的变化对最终loss的影响程度,因为使用sigmoid函数,会将输出值压缩到0-1之间,因此靠近input的参数变化随着网络深度的加深,对output的影响越来越小,因此梯度值就越来越小。学习到的东西就越来越少。
为了解决这个问题,早期的做法是RBM,即先训练第一个layer,在训练第二个,在训练第三个。这样在反向传播的时候,第一层没有更新慢也没关系,因为已经更新好了。
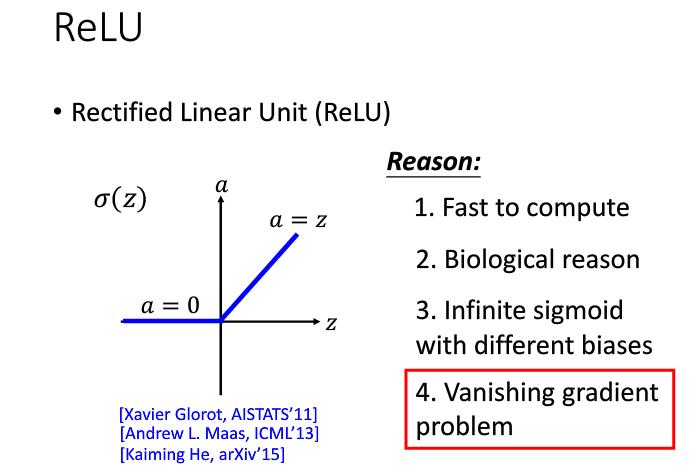
现在的做法是改变激活函数,使用ReLU(Rectified Linear Unit)激活函数,它可以解决梯度消失的问题 。因为把等于0的神经元拿掉,ReLU的神经网络就成了一个瘦长的线性网络了,就不有梯度值非常小的问题了。
使用ReLU神经网络还是非线性的,因为每次计算神经元的值作用域是不一样的(小于0跟大于0),因此神经网络还是非线性的,如果作用域也一样那就是线性的了。
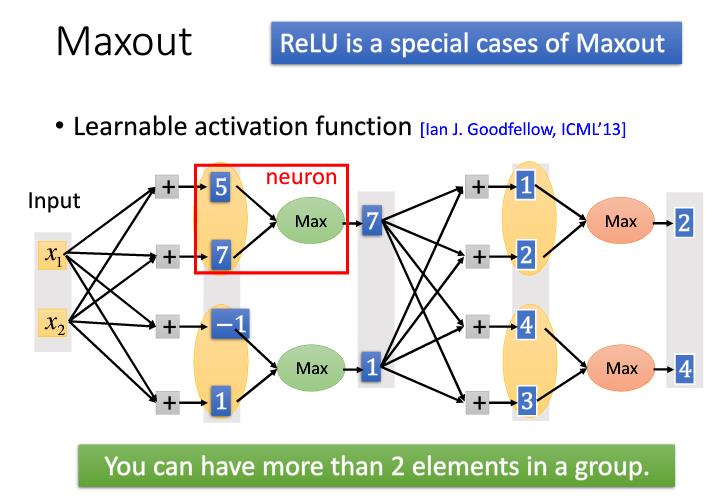
 除了ReLU还有一些其他的激活函数如下图,其中Maxout跟MaxPooling其实是一样的运算。
除了ReLU还有一些其他的激活函数如下图,其中Maxout跟MaxPooling其实是一样的运算。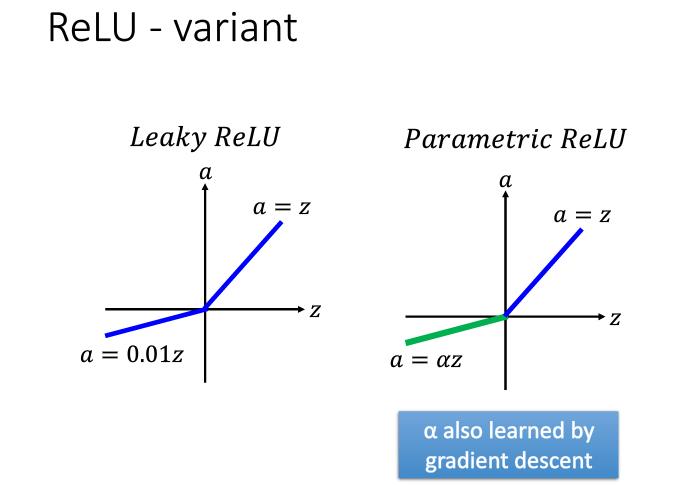
2.2 Adaptive Learning Rate
2.2.1 AdaGrad
由公式可以看出,若平时梯度值较小,即在这个维度上比较平缓,则让它的学习率便大一些,因为历史的梯度平方做分母。同理若平时梯较大,即在这个维度上比较陡峭,则让它的学习率便小一些。下面链接也有解释
Deep Learning 最优化方法之AdaGrad - 忆臻的文章 - 知乎
https://zhuanlan.zhihu.com/p/29920135
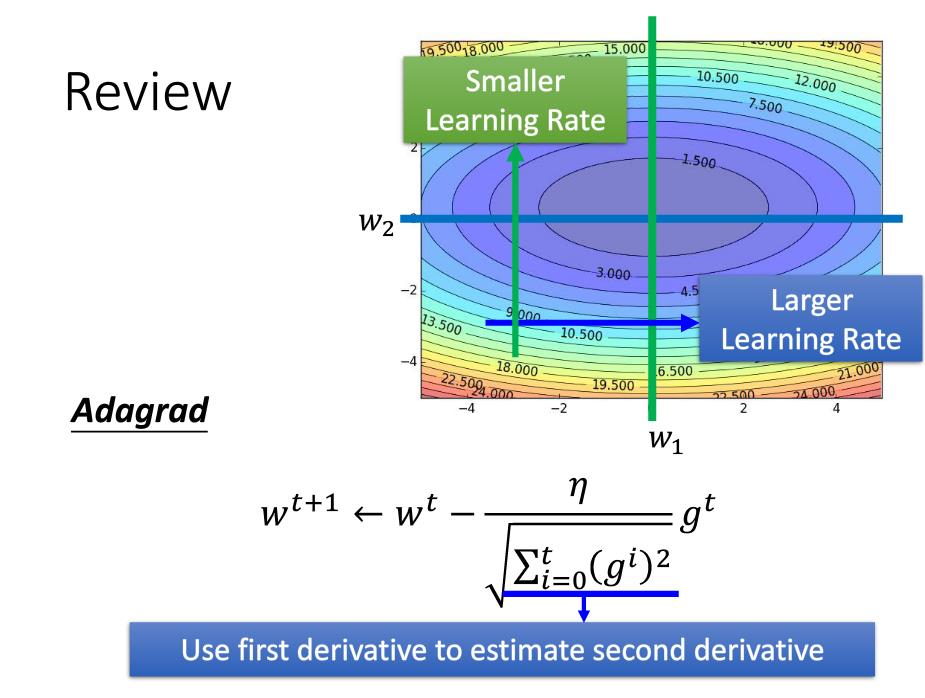 但由于历史梯度平方和是递增的,因此会使得学习率衰减到0,可能是训练提前结束。
但由于历史梯度平方和是递增的,因此会使得学习率衰减到0,可能是训练提前结束。
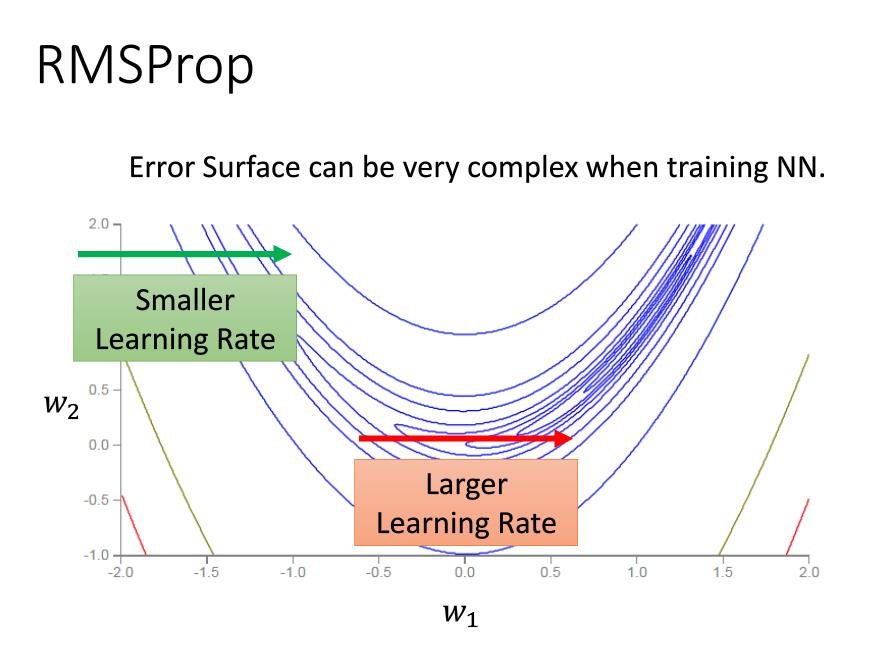
2.2.2 RMSprop
在实际问题中,我们的损失值的等高线图不会是很规则的形状,如下图,因此有了了RMSProp,对比Adagrad,使用的为历史梯度平方和,Rmsprop采用了指数加权平均的方式 即二阶动量的,当前的梯度值跟历史梯度值与当前梯度值有关,历史梯度值跟\(\beta_2\)有关.就避免了二阶动量持续积累导致训练提前结束。
即二阶动量的,当前的梯度值跟历史梯度值与当前梯度值有关,历史梯度值跟\(\beta_2\)有关.就避免了二阶动量持续积累导致训练提前结束。
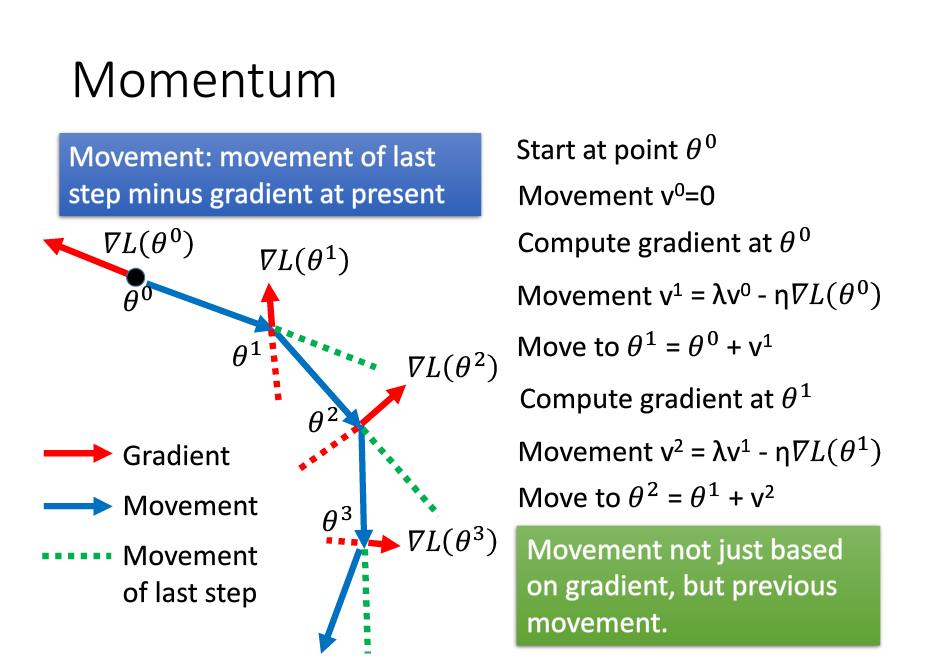
2.2.3 Momentum
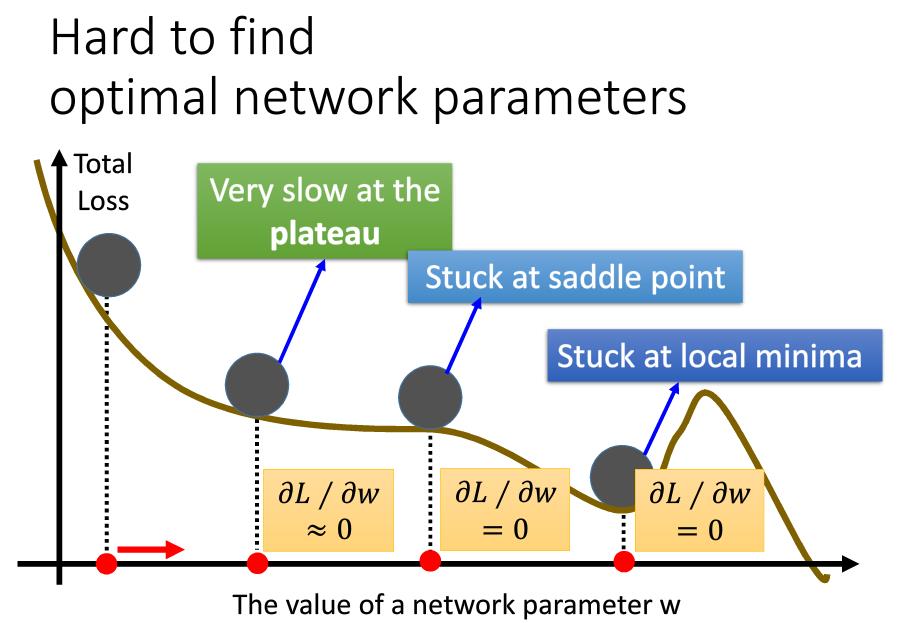
这里有个问题是,我们不需要太担心局部最优解的情况,因为这种情况是比较少了,局部最优解要求每个维度的梯度值都等于0 ,但实际上我们有很多的维度。
动量梯度下降可是使我们参考历史梯度值。即是我们在求最优解的时候有了惯性。Momentum的公式为 ,它约等于最近\(1/(1-\beta_1)\)个时刻的梯度向量和平均值。
,它约等于最近\(1/(1-\beta_1)\)个时刻的梯度向量和平均值。
2.2.4 Adam
RMSProp+Momentum形成Adam计算方法如下

3 Good Results on Testing Data?
训练结果好,而测试集结果不好,是因为发生了过拟合,有Early Stopping 、Regularization与Dropout等方法可以使用,其中Early Stopping 跟 Regularization是一个传统的方法,机器学习只要发生过拟合基本都能使用,而Dropout一般适用于神经网络中。
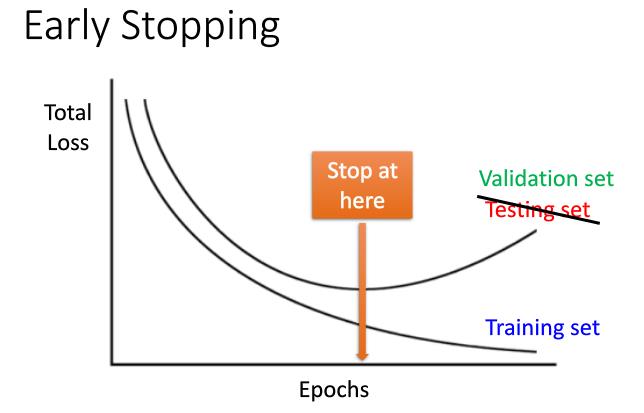
3.1 Early Stoping
如下图,因为过拟合的原因,测试集或验证集的精度会随着迭代次数的增加而降低,因此我们可以提早结束循环。
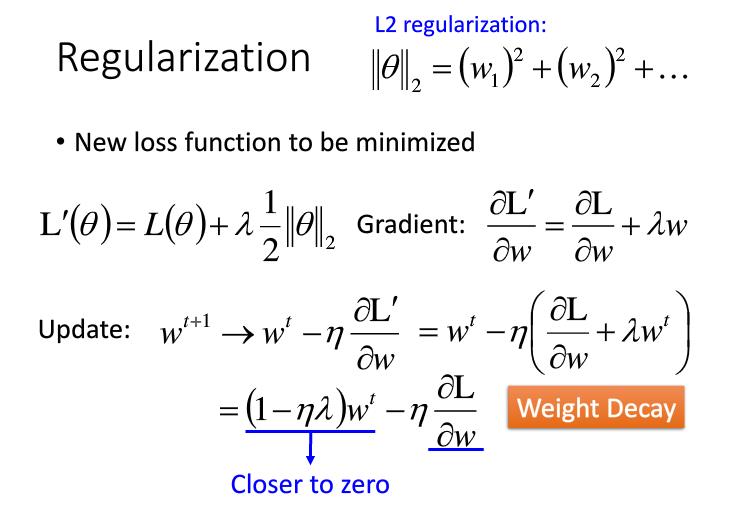
3.2 Regularization
正则化一般用L2正则化,或者L1正则化,L2用的最多。
3.2.1 L2正则化
下图为L2的正则化公式,即在原来的损失函数上加上\(\frac 1 2\lambda\)乘每个参数的平方和。
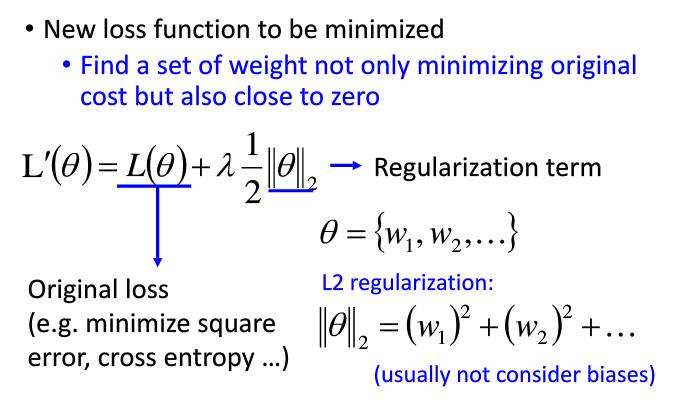
意义是这样的,如下图对加了L2正则化项的损失函数求导,结果为\((1-\eta\lambda)w^t-\eta\frac {\partial L} {\partial w}\)其中\(\eta,\lambda\)都大于0,因此\((1-\eta\lambda)\)总会小于1所以\(w^t\)总会越来越接近0。这称为权重衰减
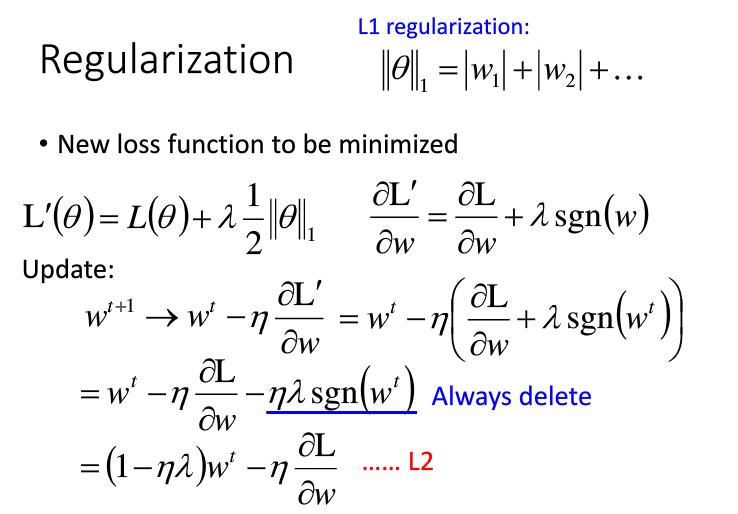
3.2.2 L1 正则化
下图为L1正则化,即在原来的损失函数上加上\(\frac 1 2\lambda\)乘每个参数的绝对值。
L1正则化的意义如下图,对加了L1正则化的损失函数求导得到\(w^t-\eta \frac{\partial L}{\partial w}-\eta\lambda sgn(w^t)\),当我们的\(w^t\)为正值的时候,\(sgn(w^t)\)为1,因此会减去一个正值\(\eta\lambda\),\(w^t\)的值会变小,接近0,当\(w^t\)为负值的时候,\(sgn(w^t)\)为\(-1\),因此会减去一个负,\(w^t\)的值\(\eta\lambda\)会变大,接近0,因此L1正则化的作用也是使参数越来越接近0.
跟L2正则化\((1-\eta\lambda)w^t-\eta \frac{\partial L}{\partial w}\) 梯度更新相比,L1每次更新减去一个固定的值,而L2正则化是乘以一个小于1的数。因此L2正则化会使参数都很接近0,但不等于0。L1因为减去固定值,所以参数值会有很多等于0的值。同时若参数初始化为一个很大的值,L2正则化会使参数值下降的非常快。
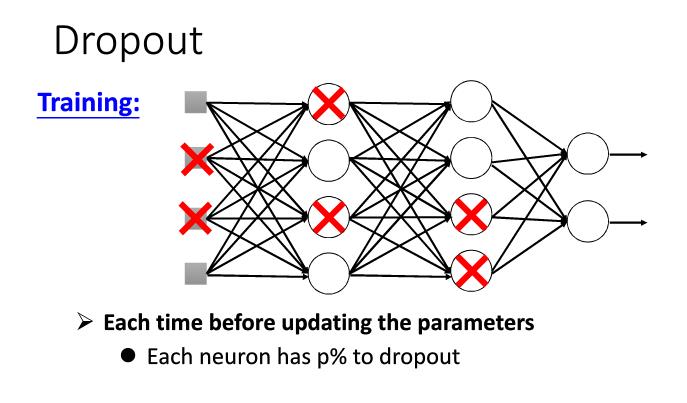
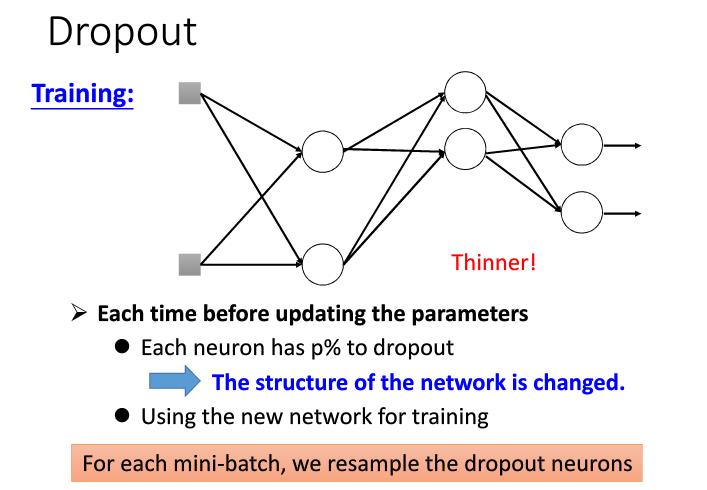
3.2.3 Dropout
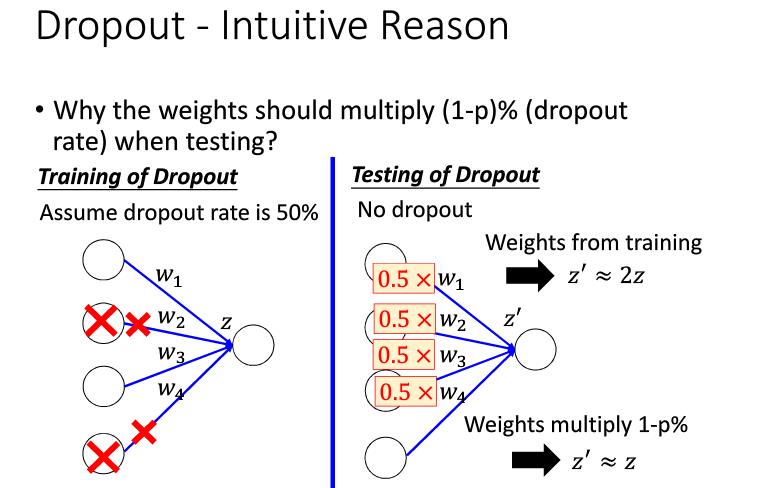
在训练的时候,每个epochs每个节点都会有%p的概率被删掉。删掉节点后的神经网络如下。
在测试的时候,每个参数都应该乘1-%p,因为在测试的时候,如果我们想得到跟训练时候接近的神经元的值,我们应该将参数缩小一点。如下图。
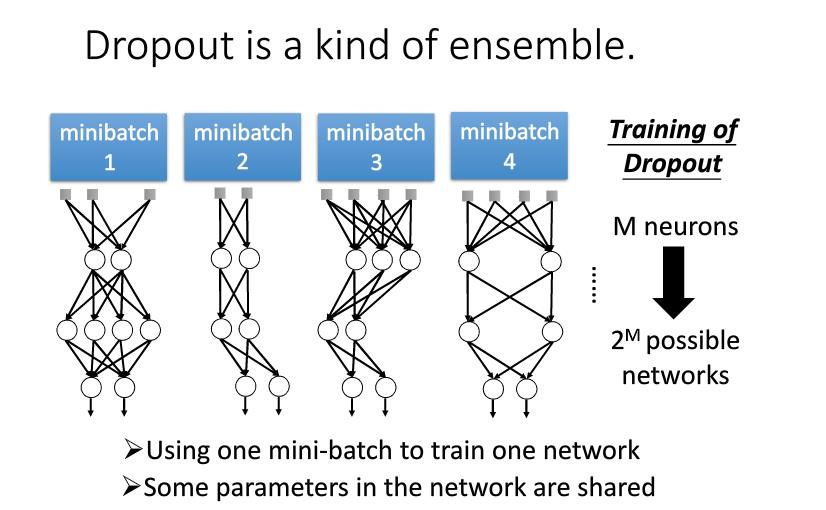
dropout为什么会有用呢,是因为dropout实际上使一种ensemble(多个模型取平均结果)。即相当于训练了多个模型,而这些模型的参数使共享的。达到了ensemble的效果。
4 Kears提示
如果我们在训练模型的时候,测试集的损失值跟精度不好,可能有下面几个原因:
- loss function设的不好。如做分类的时候,mean square error损失函数不合适
- batch_size也会对结果有影响
- 激活函数的原因:sigmoid在深层神经网络结果特别不好,最好用ReLU
- 个别时候是否normalization也会有影响
- 优化器的影响,如使用adagrad、adam、sgd有不同结果
- 过拟合,可以加上Dropout




 京公网安备 11010802041100号
京公网安备 11010802041100号