使用一套新的方法,通过移动激光扫描来估计胸径。一台2D激光扫描仪安装在一辆汽车上,面朝前,向下倾斜9度。使用惯性导航和视觉SLAM(同步定位和绘图)记录轨迹。激光扫描仪数据、轨迹和方向用于计算3D点云。代表树的聚类被逐行提取以减少定位系统中不确定性的影响。激光回波的强度被用来滤除仅掠过茎干的不可靠回波。该移动用于从茎的较大部分获得测量值,并且来自不同视图的多条线用于圆拟合。测试了两种三角方法和两种圆拟合方法。使用圆拟合在多个2D投影簇上获得了偏差为2.3% (6 mm)和均方根误差为14% (37 mm)的最佳结果。在10米工作范围内,用大约300棵测径树在五个试验区与现场数据进行比较,对该方法进行了评估。结果表明,这种方法是可行的树干测量运动的车辆,如森林收割机。
Keywords: mobile mapping; forest harvester; circle fit; stem diameter; 2D laser scanning; precision forestry; clustering
1. Introduction发展中的精确林业领域需要林分的详细信息,如林分内树木的胸径(DBH)和树干位置[1]。收集信息的一种方便的方法是在间伐操作期间从移动的车辆(例如森林收割机)获取数据,或者使用越野车从库存中获取数据。安装在森林收割机上的传感器可以记录被砍伐的树木以及留在森林中的树木的信息。该信息将在间伐后提供有价值的清单,以更新森林所有者关于林分的信息以及木材体积和生物量的估计。如果可以实时处理传感器数据,则收集的信息可以用于操作者的决策支持或机器的辅助/自主控制。移动收集stem数据的另一个目的是用于森林导航辅助[2,3]。森林冠层引起的多径效应影响了卫星导航的精度,导致定位不可靠。由于这些原因,关于能够从移动激光扫描仪传递精确DBH的算法的研究是令人感兴趣的。
从[4–6]开始,人们开发了各种方法,用于在单次或多次扫描位置使用固定式三维陆地激光扫描仪(TLS)估算DBH和采油树的位置。许多方法已经产生了有希望的结果,并可用于地块清单[7–9]。通过使用多扫描TLS,可以从多个视图中看到树木,这也可以在林分级别给出详细的树木位置。与传统测量相比,3D扫描的优势在于可以提取树干轮廓[8,10]。绘制树干剖面图后,就可以估算地上生物量[11–14]。然而,由于从TLS数据推导森林参数的过程中涉及许多计算,结果可能由于许多原因而有偏差,例如TLS扫描模式对圆拟合的影响[15]和强度入射角效应[16]。TLS应用程序收集大量数据,计算成本也可能很高。可以使用低分辨率3D数据进行简化,并且可以使用关于物体扫描仪几何形状的知识的算法来减少计算负荷[17,18]。
移动激光扫描(MLS)对于导航和移动地图绘制是有意义的。如果同时记录车辆的轨迹,安装在移动车辆上的简单2D激光扫描仪可以产生穿越区域的地图。由MLS生成的点云的质量通常低于由静态TLS生成的点云。一个常见的问题是,扫描仪的位置很难以足够的精度来估计,以成功地配准点云。在结构化环境中,例如像墙壁一样的垂直和平坦表面,可以使用识别的对象来确定位置。然而,在非结构化环境中,如森林,很难预测环境中的特征,这样的定位系统是不可靠的[19]。另一个问题是常用的移动激光扫描仪的精度。它们通常比3D产品便宜,而且角分辨率更低,激光束更宽,占地面积更大。这些特征使得点云更稀疏,每个点的误差更大,尤其是在倾斜的表面上,例如圆柱形物体的侧面。树干的直径估计在林业应用中很重要,它受到这种现象的影响。这个问题影响了圆拟合方法,圆拟合方法大大高估了直径,以及Brunner和Gizachew [19]、Ringdahl等人[20]和Jutila等人[21]更喜欢的使用视角和到树的距离的三角法。由于不同的度量标准和不同的评估方法,从MLS估计DBH所报告的各种结果比较起来很复杂。Brunner和Gizachew [19]已经推导出基底面积,单次扫描的误差约为10 m2/ha。Jutila等人[21]报道了相对误差为4%的DBH。Ringdahl等人[20]在没有分支和闭塞的受控环境中研究了各种方法的精度;随着三角法的改进,他们已经将最佳方法的误差降低到12%。Dian等人[22]已经实现了误差非常小(4.29 mm)的圆拟合,但是他们的比较材料是点云中的测量值,没有考虑激光测量的物理误差。在实验室环境中,Kong等人[23]估算了树干的半径,相对偏差为4%;然而,他们在同一高度使用多次静止扫描,以减少距离测量中统计误差的影响。
扫描仪的位置和方向对于MLS点云的质量至关重要。根据εD = sin(εv) × D,激光扫描器方向的角度误差εv在距离D处传播;例如,在距离D = 10米处,εv = 1o给出误差εd = 17.5厘米。位置误差只是简单地转换点:激光扫描仪1厘米的位置误差产生1厘米的点误差。全球导航卫星系统(GNSS)通常用于导航和定位目的。智能手机等廉价设备在良好的环境下可以达到米级精度,但精度取决于信号质量和定位卫星的视线。在森林中,信号会被林冠减弱。这进一步降低了精确度,在地面上无法达到米的精度[24]。使用加速度计和陀螺仪传感器的GNSS和INS(惯性导航系统)/IMU(惯性测量单元)的组合可以支持GNSS在困难条件下估计更好的位置[25]。然而,惯性导航系统普遍存在漂移问题,尤其是在成本较低、重量较轻的系统中。视觉信息(或激光扫描/雷达数据)可用于使用同步定位和绘图(SLAM)的位置估计[26]。SLAM通常与INS结合使用,可以补偿漂移,但是需要有区别的特征点来计算位置。在很难找到独特特征点的环境中,SLAM方法是有问题的。MLS系统(与[21]中使用的相同)通过SLAM定位,使用2D激光数据作为输入[2]。该系统可用于小环路(如50米× 100米),但较大环路的累积误差高得令人无法接受。他们还使用同步相机测试了SLAM,但没有获得可用的结果。为了定位林业机械,使用三个一组构成三角形的树位置进行定位。点云中的误差没有说明。使用智能手机质量的GNSS天线可实现厘米级精度[27]。[28]提出了利用GPS/IMU组合实时降低计算负荷以达到厘米级精度的方法,即使在具有挑战性的环境中也是如此。在任何情况下,如果应该用普通的3D TLS算法处理点云,厘米精度对于线到点云的配准是不够的。
在本文中,我们跟进了SLU(瑞典农业科学大学)、斯科格佛斯克(瑞典林业研究所)和FOI(瑞典国防研究机构)[29]的早期项目,在该项目中构建了一个用于移动激光扫描森林的原型系统。一台2D激光扫描仪安装在一辆汽车上,使用惯性导航和视觉SLAM的组合记录轨迹。在一次实地调查中,从五个林分收集了数据,也收集了部分实地数据。使用轨迹数据和扫描仪的方向将激光扫描仪数据配准到3D点云中。DBH是使用稍加修改的方法对TLS点云[9]进行估算的,RMSE为24% (5.8厘米),偏差为1.9%(0.5厘米)。小偏差表明该方法可用于结果的汇总,如林分水平上的断面积估计。然而,对于单木估计,该方法的价值较低,因为RMSE较大。大的RMSE可能是由定位中的误差引起的,这使得点云有噪声。我们提出了使用该2D/3D点云的特殊特征来估计树的DBH的方法,以逐行提取特征,然后仅使用3D信息来定位树干。
2. Materials and Methods数据于2013年11月在瑞典奥斯特格兰德的五个不同地点收集。这些地点包括各种不同地形条件的森林类型。表1总结了这些地点。
表1. 考点总结。
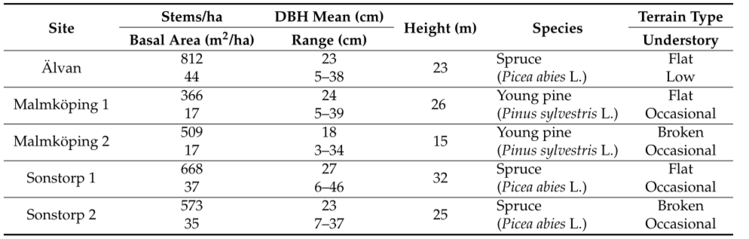
参考数据是在邻近穿越轨道的20 × 20米宽的地块上收集的。使用测径器收集DBH,并使用POSTEX设备[30]使用超声波三边测量法对树木进行定位。每个地块上的四棵参考树在MLS点云中手动识别,并用于将田间树的坐标转换为点云坐标。树高数据是根据机载激光扫描和国家森林调查数据从瑞典森林属性图[31,32]中提取的。参考数据汇总见表1。
SICK LMS 511 激光扫描仪是一款二维激光扫描仪(也称为线激光扫描仪)。它沿水平线发出激光脉冲并记录回波返回该线中每个位置的时间。然后使用该时间计算到物体的距离。在此设置中,记录了第一个回波,这意味着在检测到 10% 的假定信号时记录回波。激光扫描仪安装在倾斜 9 度的汽车上,以便在车辆移动时获取 3D 数据;参见图 1 和图 2。图 3 显示了点云的鸟瞰图。有关激光扫描仪的数据如表 2 所示。

图 1. SICK LMS 511 线激光扫描仪与 Chameleon 定位系统一起安装在地形车上。激光扫描仪正面安装,倾斜 9 度。
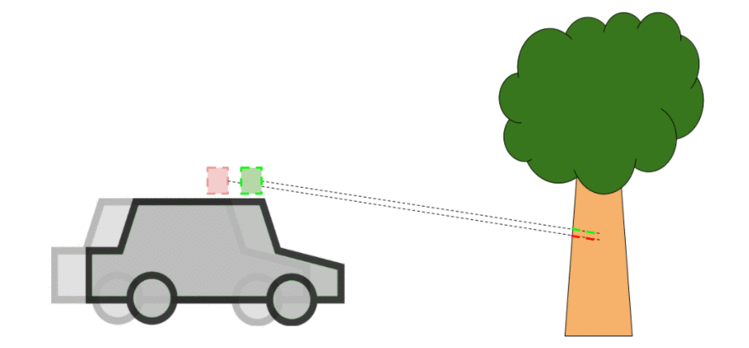
图 2. 当车辆移动时,可以使用 2D 激光扫描仪距离数据结合传感器的位置和方向构建周围环境的 3D 点云。
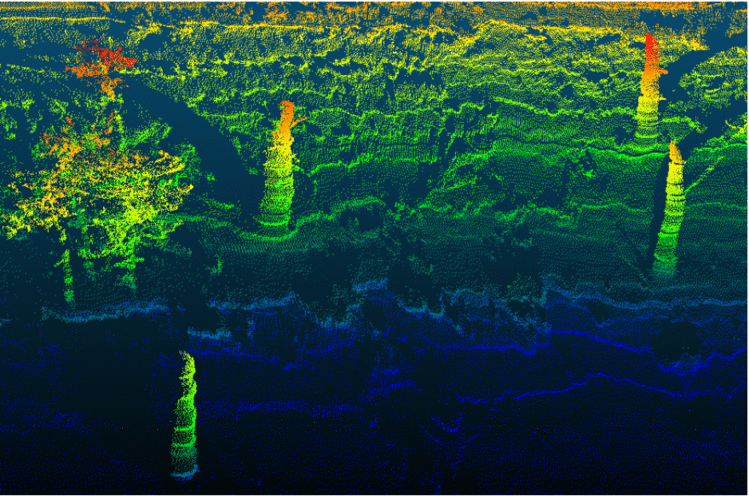
图 3. 按线号着色的点云鸟瞰图。蓝色,低数;红色,高数。每个茎都在一个弯曲的区域上投下阴影,该区域被遮挡在视线之外。
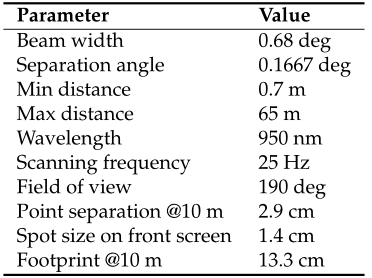
表 2. 与所用应用相关的 SICK LMS 511 数据(高分辨率模式)。
由 FOI [33] 开发的 Chameleon 定位系统已用于记录轨迹。最初,Chameleon 被开发成为一种高度精确的定位系统,适用于 GPS 禁用环境,主要是室内。高精度定位可以提高在未知建筑物中工作的烟雾潜水员、急救人员和士兵的安全性。运动由 Xsens MTi-G IMU 记录,使用 Point Grey Bumblebee XB3 立体视频的视觉 SLAM 用于减少漂移。图 4 显示了安装在带有 SICK 扫描仪的车顶行李架上的系统。同时,跟踪运动,构建周围环境的地图。映射和跟踪能力足以定位一个人,但信号中有一些噪音。由于噪音,系统有一些漂移。图 5 描述了一个轨道,它应该是一个闭环,但它不是。

图 4. 安装在车顶行李架上的 SICK 扫描仪和 Chameleon 定位系统。 SICK 扫描仪正面朝前,偏角 9 度,Bumblebee 相机正面朝侧面。
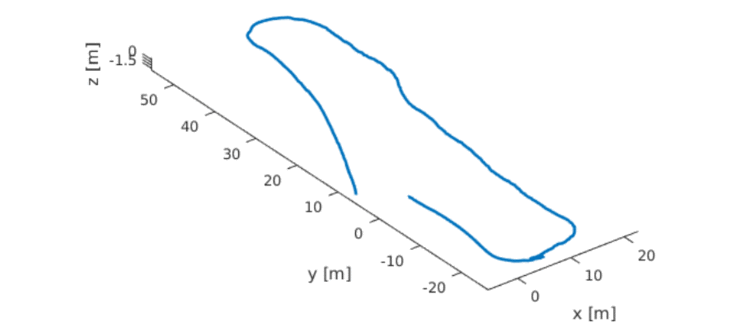
图 5.Sonstorp 1 上 Chameleon 的 3D 轨迹。系统中的漂移是可见的,因为这些数据是从闭环中记录的。
使用 Chameleon 轨迹以及来自 SICK 激光扫描仪的距离和角度数据计算 3D 点云。
对于每一行:
由于记录的轨迹具有明显干扰点云质量的噪声水平,因此数据主要作为二维数据逐行处理。 3D 信息仅用于定位目的,将不同的簇连接成茎并获得茎的位置。该过程的流程图如图 6 所示,更多详细信息将在本节中进行描述。
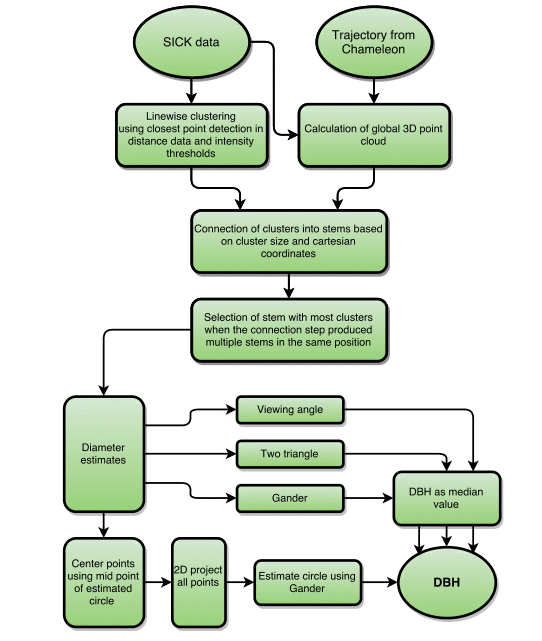
图 6. 流程图。
Clustering and Connection
如上所述,二维线激光扫描仪数据的圆拟合存在一个众所周知的问题。问题的根源是激光脉冲的物理特性,导致过早记录回波,所描述的圆会比物体的半径大。在这种情况下,使用 SICK LMS 511,每个激光脉冲在 10 米距离处的足迹为 13 厘米,脉冲之间的间隔为 3 厘米。这意味着四个脉冲将重叠(图 7)。在茎的边缘,会出现一种现象,即记录下仅接触茎的脉冲的第一个回波。由于激光扫描仪会将回波记录为与杆外某个角度的光束中点相对应,因此杆在点云中看起来比实际更宽。在图 8–10 中,显示了点强度方面的效果。边缘上的点具有低得多的强度,因为只有一小部分脉冲被反射。通过干净的距离标准,最外层点的强度下降,聚集为干点。
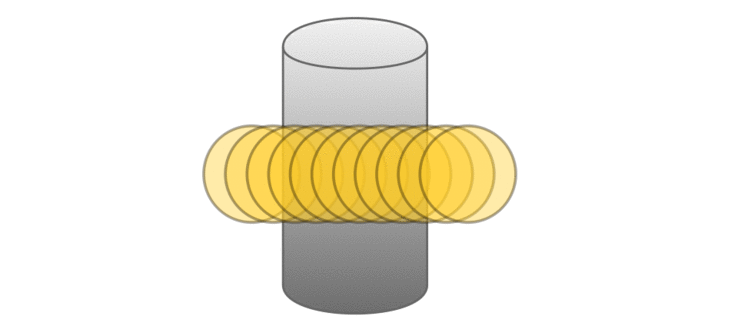
图 7. 10 m 处的阀杆。直径 20 厘米; 0.17 度的光束中心之间的角度分离在杆上产生 2.9 厘米的分离;光束发散角 0.68 度 + 光斑尺寸 1.4 厘米等于 13.3 厘米的占地面积。
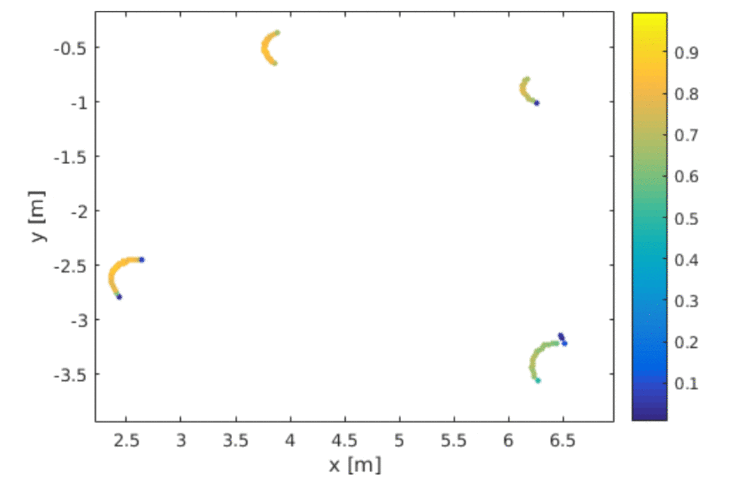
图 8. 一行 SICK 数据在 3D 计算后投影到地平面上的四个干点簇。这些点根据归一化强度着色。基于距离标准的聚类端点具有较低的强度(蓝色)。
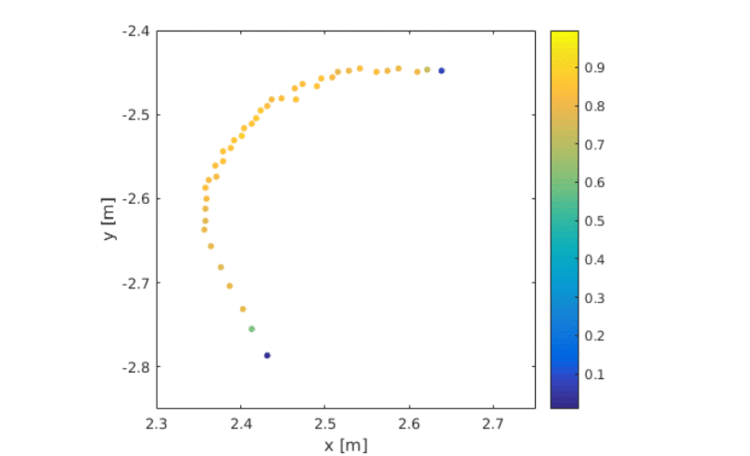
图 9. 边缘点。端点具有较低强度(蓝色)的茎点簇。蓝色点与黄色点不在同一个圆上;他们稍微在外面。
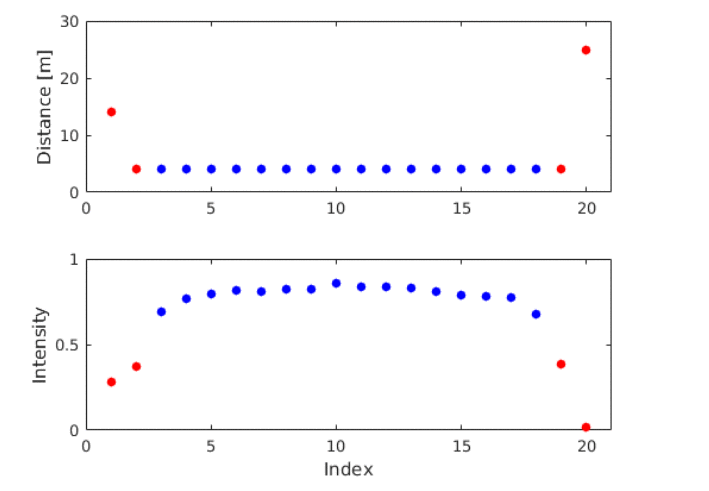
图 10. 蓝色点按强度聚类为茎,红色点不是茎。茎丛外各侧翼各有一点与茎丛等距,按距离聚类应归类为茎。 x 轴:集群中的点索引。
对于每行 SICK 数据:
Post-Processing
由于遮挡(例如树枝和类似物)会导致出现不同大小的不完整簇,因此在一组词干中的同一位置可能有多个词干。因此,最佳词干是通过以下方式通过多数票选出的:
Finding Breast Height in the Point Cloud
出于森林测量目的,胸高定义为树木发芽点上方 1.3 m。这个点通常很难确定,这个点云中的地平面也是如此。在这里,我们使用扫描仪坐标系中距地面 1.3 ± 0.75 米的茎下部的扫描线来估计胸高直径。由于可以估计挪威云杉的茎锥度约为 1 cm/m [19],并且我们假设苏格兰松的锥度相似,因此粗略估计胸高会导致相对较小的误差。
DBH Estimation
已通过各种方法估算 DBH,以比较不同算法的性能。
第一种方法是估计茎上每条线的直径,然后使用这些值的中值作为 DBH。使用 Ganders 的直接法 (Gand) [34] 和两种三角法进行圆拟合。三角法,称为视角法 (V A) 和两个三角形法 (2T),在 [20] 中进行了描述。他们使用集群中的点数、激光扫描仪的已知角分辨率以及到集群中点的距离 (V A) 或到集群边缘点的距离 (2T)。
第二种方法是利用从不同角度收集不同扫描线的特性。然后,与来自单个扫描线的点相比,这些点分布在茎的圆周上的更大部分,并且圆拟合对端点中的错误不那么敏感;参见图 11。对于每个茎,所有簇的点都使用由 Ganders 的直接方法估计的直线圆的中点居中。然后,将点集进行二维投影,并使用 Ganders 的直接法 (2DGand) 估算这些点的直径。
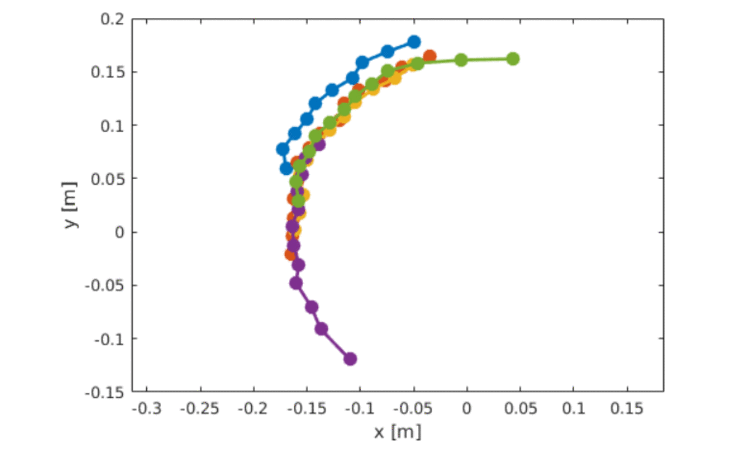
图 11. 来自不同扫描线的重叠点簇提供了更大部分的茎圆周来拟合一个圆。
Gauss–Newton 圆拟合 [35] 也进行了测试,均使用中值和 2D 投影进行茎估计。 Gauss-Newton 在很多情况下表现良好,但如果点数据集噪声太大,就会出现收敛问题,有些 stem 会得到不切实际的结果。因此,结果变得难以比较,我们决定不包括高斯-牛顿法的结果。
将结果与现场数据进行了比较。由于现场数据是在轨道两侧收集的,因此只有一小部分现场数据和 MLS 数据重叠。为了计算偏差和 RMSE(均方根误差),已使用所有可能与检测到的树相匹配的田地树。遗漏和委托误差是基于轨迹10米以内的树木。将现场数据与点云的目视检查进行了比较,发现现场数据中缺少几棵树。遗漏和委托计算中人工添加了缺失的树木,但由于胸径未知,因此未纳入直径估算的评估。
4. Discussion在本文中,我们介绍了一种新的方法系统,用于从移动激光扫描系统的原型中估算 DBH。 2D 激光扫描仪面向前方安装,向下倾斜 9 度,安装在汽车上,结合惯性导航和视觉 SLAM 记录轨迹。根据激光扫描数据、扫描仪的轨迹和方向构建了 3D 点云。高精度定位是森林中难以解决的问题,因此,轨迹包括漂移和噪声,使得点云不适合使用 3D 激光扫描点云的既定方法进行处理。
我们逐行处理点云,以减少定位误差对 DBH 估计的影响。已经对倾斜表面上激光扫描点的误差提出了一些见解,并且使用强度标准的新聚类方法产生了更适合圆拟合的茎点聚类。移动传感器从茎上的多个角度进行测量,并且在圆周的较大部分上的测量可用于使用圆拟合进行直径估计。
传感器的定位误差会影响 3D 点云,但由于在本研究中定位仅用于将簇连接成树干和估计树木位置,因此它们不会直接影响 DBH 估计。由于定位系统的漂移,一些树木被遗漏了,这使得一些树木在点云中看起来被切成碎片或严重倾斜。
对 3D 点云进行聚类以检测树干的一种常用方法是使用其邻域作为平面和平滑度约束来计算每个点的法线,以确定它们是否包含在聚类中。在这种 MLS 点云中,平移线的定位误差造成的伪影使许多茎具有波浪状结构,并且茎表面上点的法线方向可能过于不规则,以至于平滑度约束无法成功。line-wise 方法消除了法线方向平滑过渡的需要,避免了这个问题。
树干点聚类的强度标准过滤掉了树木侧翼上误差较大的测量值。该方法为圆拟合提供了足够的输入点集,因为不包括位置误差最大的点。去除强度标准会增加圆拟合的误差。在早期的工作中,在线扫描仪数据上使用圆拟合导致了严重的高估 [20]。
对于VA和2T方法,直径被低估了 30% 以上。由于与圆拟合相比误差较小,这些方法在早期的作品 [20,21,36] 中受到青睐。这些方法受信号的离散性质的影响。在距离传感器 10 米处,测量点的间距为 3 厘米。仅由于点分离,这可能会低估多达 6 厘米。这不是本研究中低估的唯一原因。当强度标准被移除时,低估减少了,但假设的高估并没有发生。来自不完整集群的影响(在此实现中未被过滤掉)可能是导致此行为的原因。当扫描线被中断时(例如被分支中断),将出现不完整的簇,并且测量的点距离太短而无法包含在线段中。在具有许多分支的主干上,有许多不完整的簇,其中包含足够的点以进行圆拟合,但由于一个或两个边缘点缺失,三角函数方法失败。在距离较远的大茎上,相邻点5cm的距离差标准可能会出现问题,这可能是公差距离太短了。
在从单个视点收集的点云中,仅存在面向视点的点。这对于圆柱形物体(例如树木)上的圆拟合是有问题的,因为收集的信息代表的扇区小于圆周的一半。来自不同扫描线的圆的 2D 投影,以及因此不同的扫描仪位置,增加了包含信息的扇区,并且具有涂抹脚印的不太准确的侧面点的影响较低。 Ganders 对 2D 投影点的直接方法表现最好,相对偏差为 2.3%(0.6 厘米),相对 RMSE 为 14%(3.7 厘米)。 Barth 等人 [29] 对该数据集的初步研究获得了 −1.9% (−0.5 cm) 的较小偏差,但 RMSE 较大,为 24% (5.8 cm)。
结果与类似方法的结果相当。在实验室环境中,Kong 等人 [23] 测量了茎直径,偏差为 4%。他们使用多次扫描来减少传感器统计误差的影响,得到的点集适合圆拟合。根据现场实验,Jutila 等人 [21] 报告了 4% 的偏差,这比我们的更大,相对误差为 11%。
Brunner 和 Gizachew [19] 评估了他们的断面积估计方法,并没有总结 DBH 统计数据,但他们的绘图表表明偏差为 3.7 厘米,均方根误差为 6.8 厘米。 Dian 等人 [22] 报告了令人印象深刻的结果,误差为 4.29 mm。然而,他们的比较材料包括对激光扫描仪点云的人工测量,这将不同于现场测量,因为它包括激光点的不确定性。
圆拟合表现最好的结果与 Ringdahl 等人 [20]、Jutila 等人 [21] 和 Hellstrom 等人 [36] 相矛盾。 Ringdahl等人[20]指出了边缘点误差大的问题。他们改进了三角算法来调整茎直径估计。我们使用强度标准不包括部分由簇中的茎反射的点的方法为圆拟合方法提供了一组足以成功的点。另一方面,当边缘点被移除时,早期首选的三角函数方法会产生低估。
Liang 等人 [37] 使用安装在全地形车上的 3D 激光扫描仪测量了一个大的场图。由于使用了 3D 激光扫描仪,他们能够使用为固定 TLS 点云开发的方法。报告的 DBH 误差是 −2.52 cm 的偏差和 2.36 cm 的 RMSE,这比我们使用线激光扫描仪的误差要小。
树木的定位受定位系统中漂移的影响。为了能够提取高质量的林分树木图,需要一种更精确的跟踪轨迹的方法。一种方法是将激光扫描仪和定位系统安装在悬挂系统中,以减少振动并平滑物理运动。另一种可能性,可能与悬挂系统结合,是将激光扫描仪数据包含在 SLAM 算法中。
需要移动来创建 3D 环境使用于帮助收割机操作员进行决策支持的系统变得复杂。使用此系统配置,将在扫描仪前方 7.5 m 处测量树木的胸高。收割机起重机可以到达该范围之外的树木并砍伐未测量的树木。扫描仪的倾角越陡,会发现胸高越接近传感器,但也会缩短工作范围并使垂直分辨率更稀疏。
由于三个原因之一,大多数被遗漏的树都被遗漏了。
(1) 树在感兴趣的高度(可能是云杉)有几个分支,并且树干上具有类似半径的圆形簇太少。这个问题可以使用来自激光扫描的多重回波来解决,但需要进一步的信号处理才能仅从树干中提取回波。
(2) 树被其他树遮挡,从扫描仪位置看不到感兴趣的高度。使用多线 2D 激光扫描仪扫描(例如 16 或 32 线)可能会发现一些因此而被遗漏的树木。
(3) 定位系统的漂移导致树太倾斜,甚至出现被砍成碎片的现象,无法作为一棵树来接受。具有更高精度和稳定性的定位系统将解决这个问题。另一种可能的解决方案是在 SLAM 算法中包含逐行检测的词干。
结果包含两棵树作为佣金错误。它们位于 Malmköping 2 试验场的尽头,彼此靠近。在那个位置,由于定位错误,点云包含无法手动解释该位置是否有树木的伪影。
MLS 数据包含林分水平森林统计数据估计的两个局限性。首先,必须考虑遮挡树木的模式。距离很近的一棵树可以遮挡其他多棵树。另一个限制是由于选择带有传感器的车辆的路径而可能产生的偏差。例如,潮湿地区、多岩石的地形或非常茂密的森林可能会因为难以驾驶而避开。
5. Conclusions在本文中,我们使用了多种新方法来增强根据移动激光扫描仪数据自动估算 DBH 的结果。首先,使用逐行数据进行聚类和直径估计的方法使得茎直径的估计独立于轨迹和共同配准点云的质量。其次,基于强度标准而非仅基于空间标准的茎聚类去除了可能位于茎外部的侧面点。最后一个创新点是同一树干上的点的居中和二维投影,但来自不同的扫描仪位置。以这种方式,圆周上较大部分的点被聚集起来。误差较大的侧面点影响较小,使用 Ganders 直接法进行圆拟合效果令人满意。
这项研究的观察表明,使用这种或类似方法的移动激光扫描可以实际应用并用于收集间伐后林分的状态或用于从移动车辆收集数据。





 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有