作者:手机用户2502880331 | 来源:互联网 | 2024-10-18 14:23
致阅读过第一版论文的SLAM学习者
不知道大家是否觉得第一版SLAM综述论文干货满满?
现在来自原作者百川的第二版SLAM综述论文也出来了!!!
(文末获取论文)
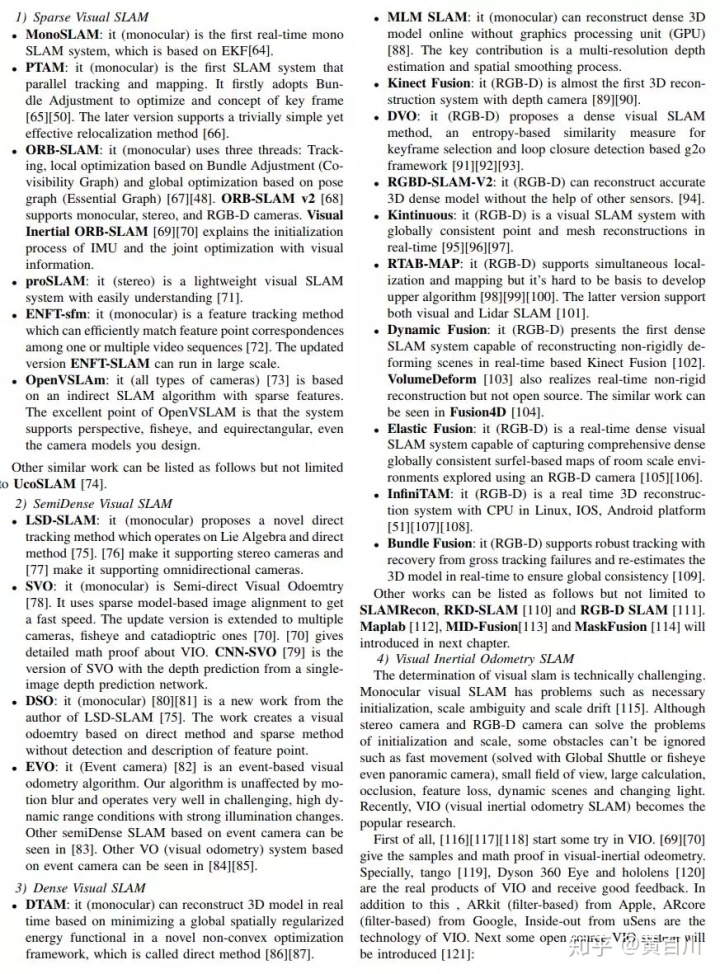
V2版论文截图
文章结构简析
让我们快速回顾一下第一版论文
1.是否看完《视觉SLAM十四讲》,敲完例程代码,仍然不知道如何开始自己的SLAM研究第一步?
2.是否知道选择什么样的传感器来进行slam系统搭建?激光or相机?激光和相机分哪几种?又有哪些厂家可以推荐?
3.是否知道orb-slam, vins等各种slam系统以及各种改进版,和Elasticfusion, Bundle Fusion等各种fusion,以及稀疏,半稀疏,稠密slam却不知道如何从大局去分门别类?
4.是否看到关于单目深度估计,尺度恢复,识别分割,动态语义等方向的论文,不知如何把论文知识点归类?
5.是否知道单目,双目,深度相机,事件相机以及全景相机的构建原理,但是不知道其支持适配的slam系统?
6.是否知道如何快速标定不同传感器之间的参数,例如多相机,相机与惯导,激光雷达与惯导,相机与激光雷达,相机与深度传感器。
7.是否知道用人用声纳在水下,无线信号如wifi也可以构建slam系统?
8.是否各种微信软文,各种知乎专栏,各种github仓库收藏了一大堆,仍然搭建不起来自己的slam系统观?
这篇综述性总结通通告诉你,作者耗时2个月精心打造且仍在不断更新,给你最直接的,最高效的SLAM领域上帝视角。不管你是slam新手,还是slam老手,你都将在这篇文章中得到满满的收获。
论文摘要截图
本论文主要讲述了3个大部分:激光slam,视觉slam和激光视觉等多传感器融合slam。1.激光slam涉及激光传感器的原理介绍,产品选型,开源激光slam系统的介绍,比较,分类。而后介绍了深度学习在激光slam中的应用,以及激光slam的挑战和未来。2.视觉slam涉及视觉传感器的原理介绍,产品选型,开源视觉slam系统和视觉惯性系统的介绍,比较,分类。而后介绍了深度学习在视觉slam中的应用,以及视觉slam的挑战和未来。3.激光视觉等多传感器slam系统涉及多传感器之间的内外参标定方法(v1版论文主要是激光和视觉两种传感器,v2涉及其余传感器比如声纳,无线wifi信号),以及从硬件层,数据层,任务层去介绍现在的多传感器融合工具和融合技术,融合产品,最后介绍了多传感器融合的挑战与未来。
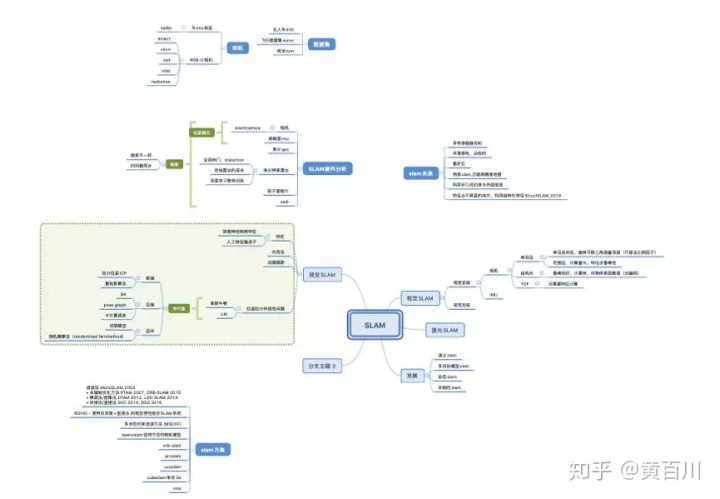
部分逻辑xmind图
论文部分截图
最新版论文链接 请移步原作者公众号“百川录”(Baichuan_Share) 回复 "论文" 二字即可获得,且作者在不断更新中。














 京公网安备 11010802041100号
京公网安备 11010802041100号