作者:大印文化 | 来源:互联网 | 2023-09-16 20:43
目录一、Cubemx环境搭建1.时钟配置2.iic配置3.串口配置4.GPIO中要改名字5.project配置6.生成代码二、Clion中的代码1.main.c加入ÿ
目录
一、Cubemx环境搭建
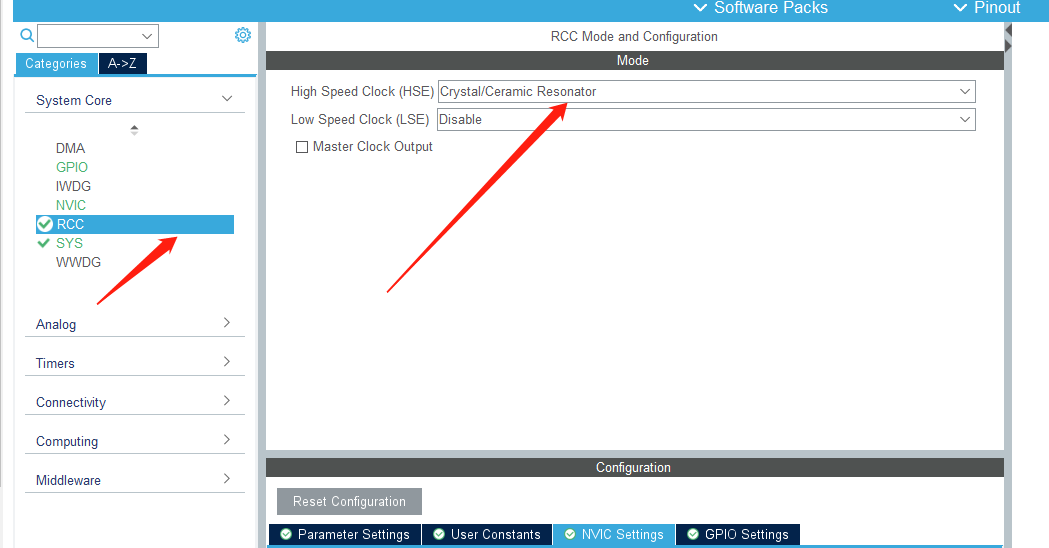
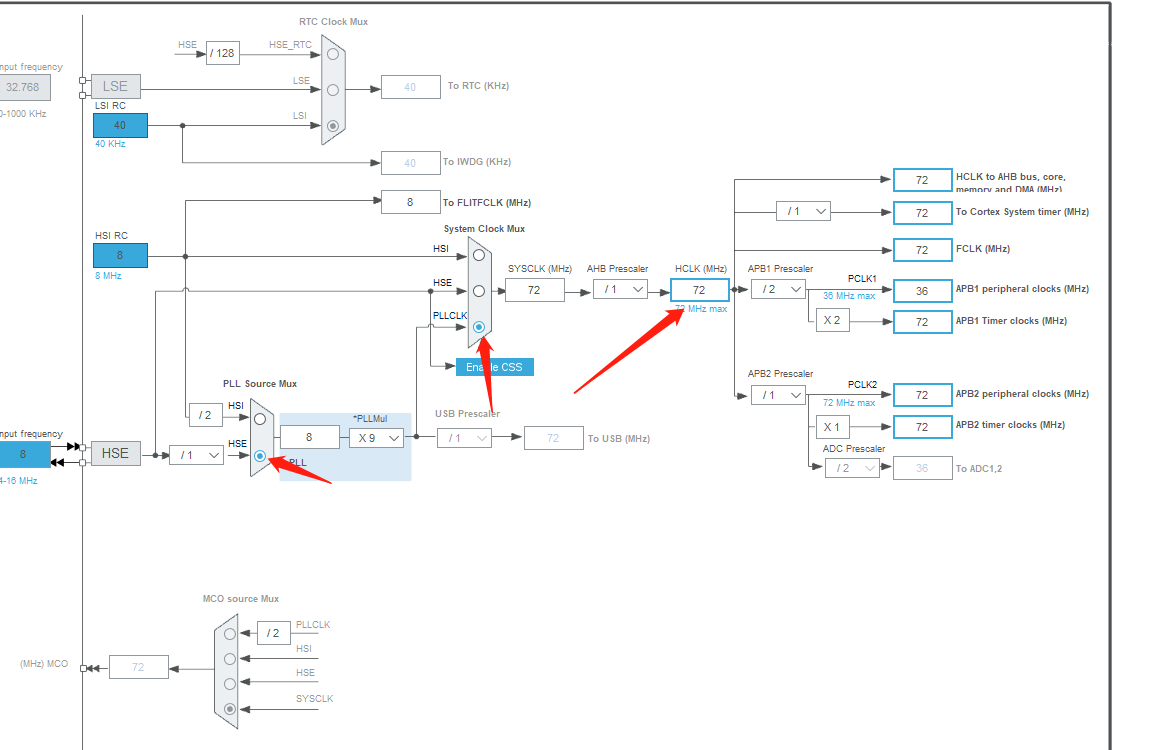
1.时钟配置
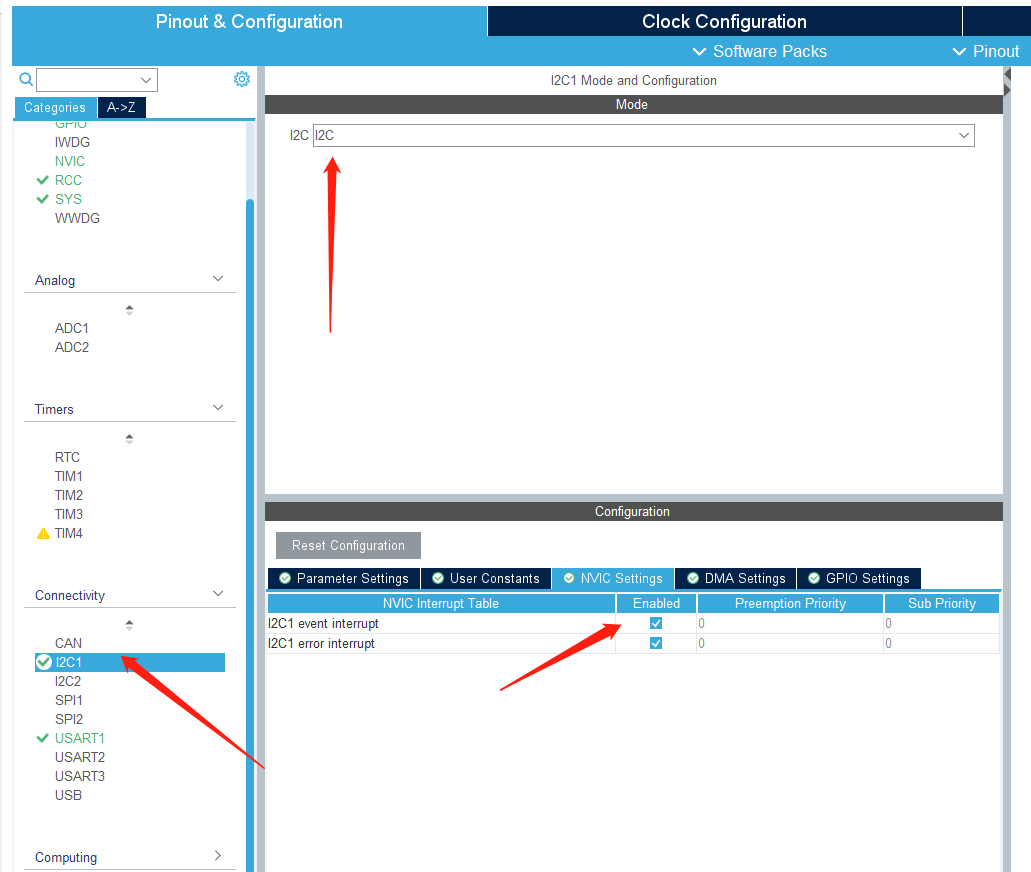
2.iic配置
3.串口配置
4.GPIO中要改名字
5.project配置
6.生成代码
二、Clion中的代码
1.main.c加入()
2.在clion中创建gy30.c和gy30.h文件
3.gy30.c代码
4.g30.h代码
5.然后直接下载进去就OK了
一、Cubemx环境搭建
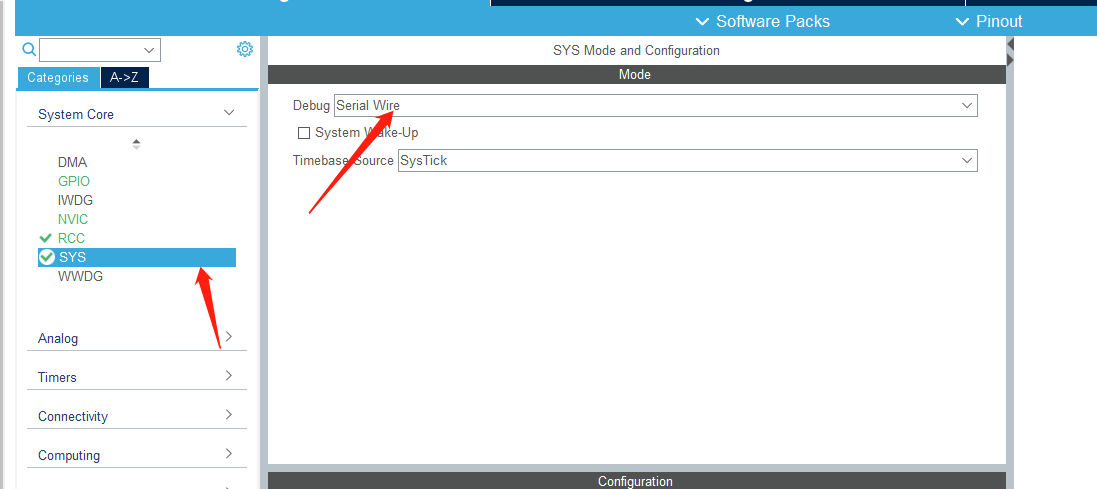
1.时钟配置
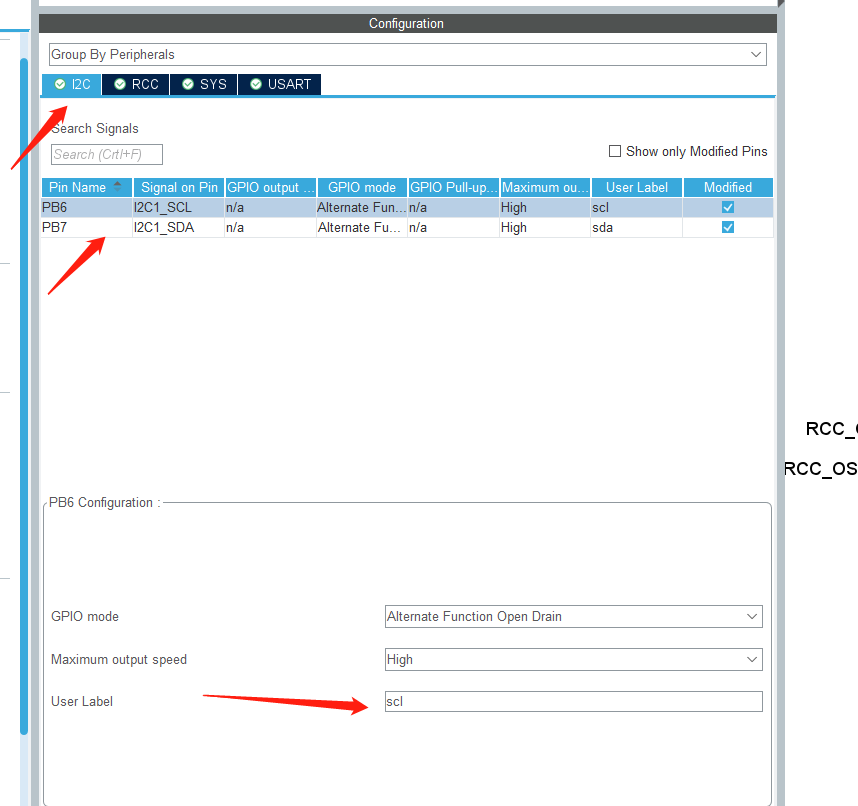
2.iic配置
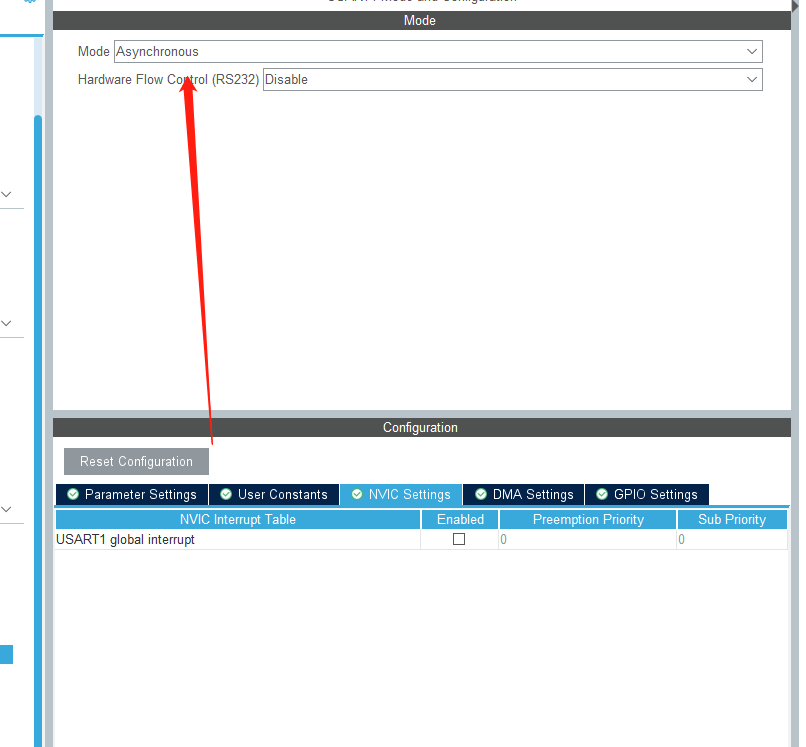
3.串口配置
4.GPIO中要改名字
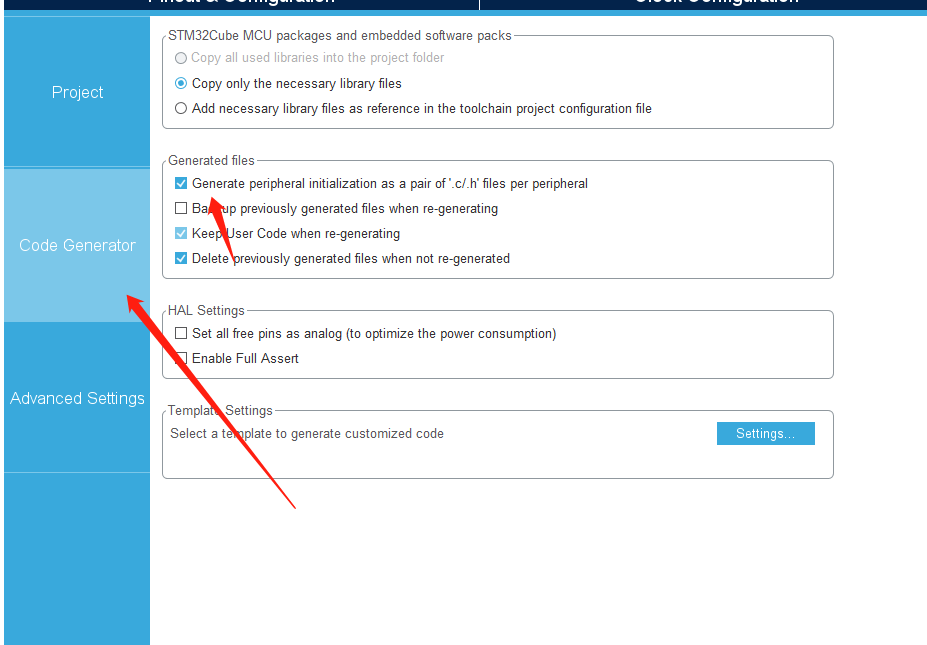
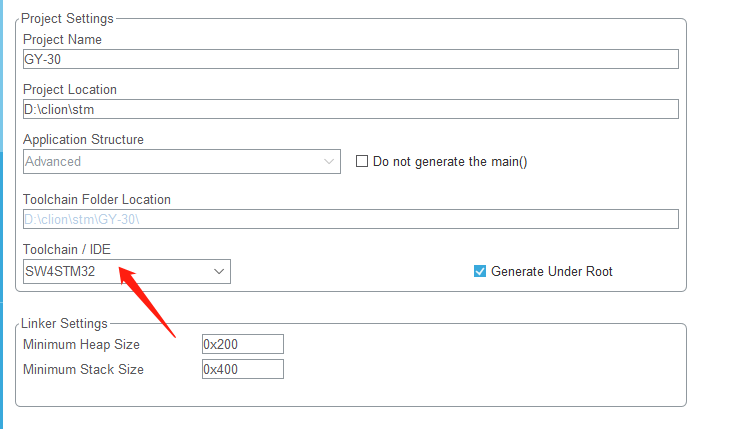
5.project配置
6.生成代码
二、Clion中的代码
1.main.c加入()
#include "stdio.h"
#include "gy30.h"Init_BH1750();//在初始化的时候加入//在while中加入
sprintf((char *)str_buff,"光照强度:%d lx\r\n",Value_GY30());HAL_UART_Transmit(&huart1,str_buff,sizeof (str_buff),10000);HAL_Delay(1000);
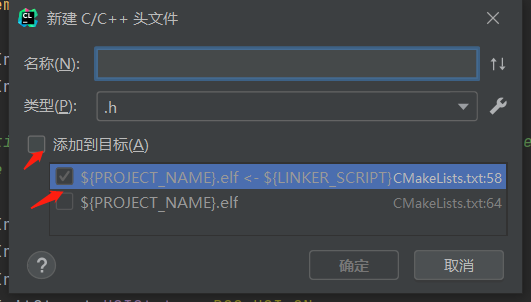
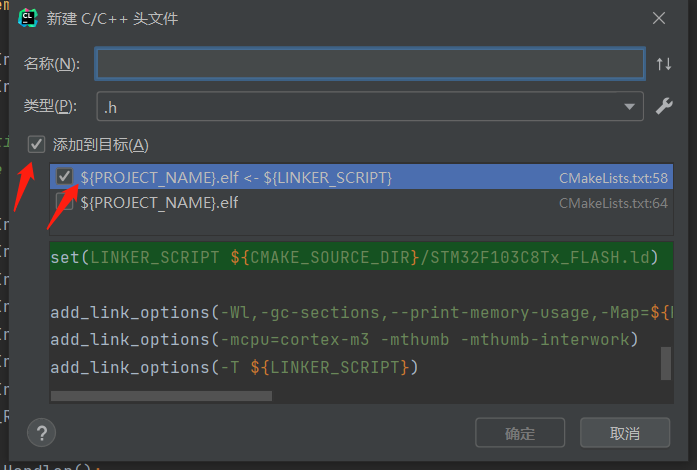
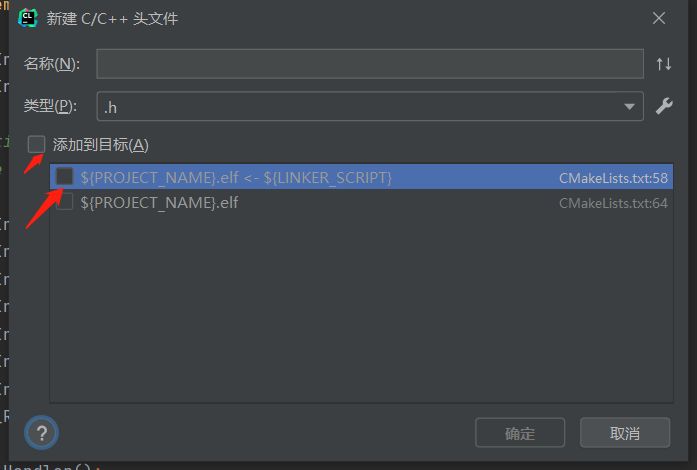
2.在clion中创建gy30.c和gy30.h文件

先点开对勾,然后都去掉(这个很重要)
同理建立gy30.c文件
3.gy30.c代码
#include "gy30.h"
uint8_t mcy=0;
uint8_t BUF[3];
/***开始信号**/
void BH1750_Start()
{HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_SET); //拉高数据线HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_SET); //拉高时钟线HAL_Delay(5);HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_RESET); //产生下降沿HAL_Delay(5);HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_RESET); //拉低时钟线
}/*****停止信号******/
void BH1750_Stop()
{HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_RESET); //拉低数据线HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_SET); //拉高时钟线HAL_Delay(5);HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_SET); //产生上升沿HAL_Delay(5);
}
/*****初始化BH1750******/
void Init_BH1750()
{BH1750_Start(); //起始信号BH1750_SendByte(SlaveAddress); //发送设备地址+写信号BH1750_SendByte(0x01); //内部寄存器地址BH1750_Stop(); //停止信号}//连续读出BH1750内部数据
void mread(void)
{uint8_t i;BH1750_Start(); //起始信号BH1750_SendByte(SlaveAddress&#43;1); //发送设备地址·&#43;读信号for (i&#61;0; i<3; i&#43;&#43;) //连续读取6个地址数据到BUF{BUF[i] &#61; BH1750_RecvByte();if (i &#61;&#61; 3){BH1750_SendACK(1); //最后一个数据需要回NOACK}else{BH1750_SendACK(0); //回应ACK}}BH1750_Stop(); //停止信号Delay_mms(5);}uint32_t Value_GY30(void)
{uint16_t dis_data;uint16_t Value_GY_30;HAL_Delay(180); //延时180ms mread(); //连续读出数据&#xff0c;存储在BUF中dis_data&#61;BUF[0];dis_data&#61;(dis_data<<8)&#43;BUF[1];//字节合成数据Value_GY_30&#61;(float)(dis_data/1.2);Single_Write_BH1750(0x01); // power onSingle_Write_BH1750(0x10);// H- resolution modereturn Value_GY_30;
}
//系统主频72MHZ
/*void delay_us(uint16_t us)
{while(us--){__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();}
}*/
void Delay_mms(uint16_t tmp)
{uint16_t i&#61;0;while(tmp--){i&#61;12000;while(i--);}
}/**************************************
发送应答信号
入口参数:ack (0:ACK 1:NAK)
**************************************/
void BH1750_SendACK(int ack)
{GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.Pin &#61; scl|sda;GPIO_InitStruct.Mode &#61; GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Speed &#61; GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);if(ack &#61;&#61; 1) //写应答信号HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_SET);else if(ack &#61;&#61; 0)HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_RESET);elsereturn;HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_SET);HAL_Delay(5);HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_RESET);HAL_Delay(5);
}/**************************************
接收应答信号
**************************************/
int BH1750_RecvACK()
{GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.Mode &#61; GPIO_MODE_INPUT; /*输入上拉*/GPIO_InitStruct.Speed &#61; GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.Pin &#61; sda;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_SET); //拉高时钟线HAL_Delay(5);if(HAL_GPIO_ReadPin( GPIOB, sda ) &#61;&#61; 1 )//读应答信号mcy &#61; 1 ;elsemcy &#61; 0 ;HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_RESET); //拉低时钟线HAL_Delay(5);GPIO_InitStruct.Mode &#61; GPIO_MODE_OUTPUT_PP;HAL_GPIO_Init( GPIOB, &GPIO_InitStruct );return mcy;
}/**************************************
向iic总线发送一个字节数据
**************************************/
void BH1750_SendByte(uint8_t dat)
{uint8_t i;for (i&#61;0; i<8; i&#43;&#43;) //8位计数器{if( 0X80 & dat )HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_SET);elseHAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_RESET);dat <<&#61; 1;HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_SET); //拉高时钟线HAL_Delay(5);HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_RESET); //拉低时钟线HAL_Delay(5);}BH1750_RecvACK();
}//我们对BH1750发送命令时&#xff0c;要先发送器件地址&#43;写入位&#xff0c;然后发送指令
//读取数据的时候&#xff0c;需要先发送器件地址&#43;读入位&#xff0c;然后读取两字节数据//写入指令
void Single_Write_BH1750(uint8_t REG_Address)//REG_Address是要写入的指令
{BH1750_Start(); //起始信号BH1750_SendByte(SlaveAddress); //发送器件地址&#43;写信号BH1750_SendByte(REG_Address); //写入指令&#xff0c;内部寄存器地址BH1750_Stop(); //结束信号
}
/**************************************
从iic总线读取一个字节地址
**************************************/
uint8_t BH1750_RecvByte()
{uint8_t i;uint8_t dat &#61; 0;uint8_t bit;GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.Mode &#61; GPIO_MODE_INPUT; /*上拉输入*/GPIO_InitStruct.Pin &#61; sda;GPIO_InitStruct.Speed &#61; GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init( GPIOB, &GPIO_InitStruct );HAL_GPIO_WritePin(GPIOB, sda,GPIO_PIN_SET); //准备读取数据for (i&#61;0; i<8; i&#43;&#43;) //8位计数器{dat <<&#61; 1;HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_SET); //拉高时钟线HAL_Delay(5);if( SET &#61;&#61; HAL_GPIO_ReadPin( GPIOB, sda ) )bit &#61; 0X01;elsebit &#61; 0x00;dat |&#61; bit; //读数据 HAL_GPIO_WritePin(GPIOB, scl,GPIO_PIN_RESET); //拉低时钟线HAL_Delay(5);}GPIO_InitStruct.Mode &#61; GPIO_MODE_OUTPUT_PP;HAL_GPIO_Init( GPIOB, &GPIO_InitStruct );return dat;
}
4.g30.h代码
#ifndef __GY30_H
#define __GY30_H
#include "main.h"
#define scl GPIO_PIN_6
#define sda GPIO_PIN_7#define SlaveAddress 0x46 //ADDR接GND时的器件地址
#define BH1750_PWR_DOWN 0x00 //关闭模块
#define BH1750_PWR_ON 0x01 //打开模块等待测量命令
#define BH1750_RST 0x07 //重置数据寄存器值在PowerOn模式下有效
#define BH1750_CON_H 0x10 // 连续高分辨率模式,1lx,120ms
#define BH1750_CON_H2 0x11 // 连续高分辨率模式.5lx,120ms
#define BH1750_CON_L 0x13 // 连续低分辨率模式,4lx,16ms
#define BH1750_ONE_H 0x20 // 一次高分辨率模式,1lx,120ms,测量后模块转到PowerDown模式
#define BH1750_ONE_H2 0x21 // 一次高分辨率模式,0.5lx,120ms,测量后模块转到PowerDown模式
#define BH1750_ONE_L 0x23 // 一次低分辨率模式,4lx,16ms,测量后模块转到PowerDown模式void BH1750_Start(void);
void BH1750_Stop(void);
void Init_BH1750(void);
void mread(void);
uint32_t Value_GY30(void);
void Delay_mms(uint16_t tmp);
void BH1750_SendACK(int ack);
int BH1750_RecvACK(void);
void BH1750_SendByte(uint8_t dat);
uint8_t BH1750_RecvByte(void);
int I2C_ReadData(uint8_t slaveAddr, uint8_t regAddr, uint8_t *pData, uint16_t dataLen);
void Single_Write_BH1750(uint8_t REG_Address);#endif
5.然后直接下载进去就OK了
有用的话一定要来个小小的赞哦&#xff01;
如果有什么问题可以在评论区提出来。





 京公网安备 11010802041100号
京公网安备 11010802041100号