作者丨成长中的菜鸟@知乎
来源丨https://zhuanlan.zhihu.com/p/402301643
编辑丨3D视觉工坊
1、整体框架
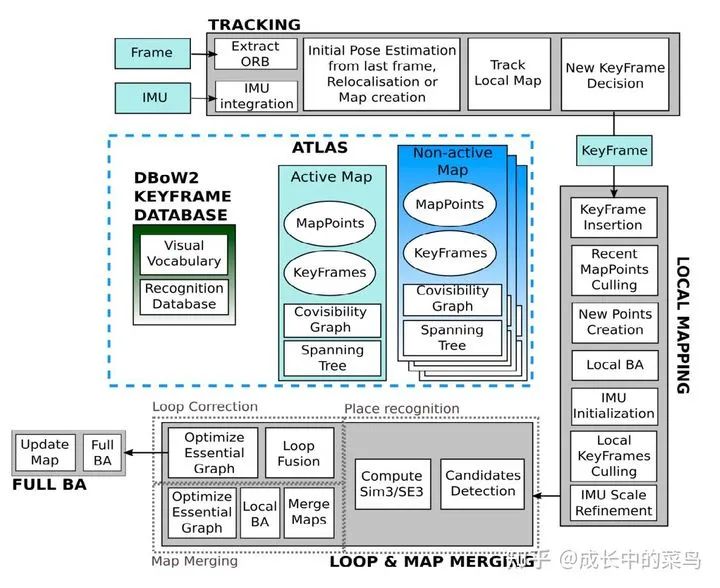
1.1 Tracking 模块
处理传感器信息并实时计算当前帧在激活地图中的姿态。同时该模块也决定了是否将当前帧作为关键帧。在视觉-惯性模式下,通过在优化中加入惯性残差来估计刚体速度和 IMU 偏差。当追踪丢失时,tracking 线程会尝试在 Atlas 地 图中重定位当前帧。若重定位成功,恢复追踪,并在需要的时候切换激活地图。若一段时间后仍未激活成功,该激活地图会被存储为未激活地图,并重新初始化一个新的激活地图。
1.2 Local mapping 模块
加入关键帧和地图点到当前激活地图,删除冗余帧,并通过对当前帧的附近关键帧操作,利用视觉 BA 或视觉-惯性 BA 技术来优化地图。此外,在惯性模式下,mapping 线程会利用最大后验估计(MAP)技术来初始化和优化 IMU 参数。
1.3 Loop and map merging 模块
每当加入一个新的关键帧,该线程在激活地图和整个 Atlas 地图中检测公共区域。如果该公共区域属于激活地图,它就会执行回环校正;如果该公共区域属 于其他地图,就会把它们融合为一个地图,并把这个融合地图作为新的激活地图。在回环校正以后,一个独立线程就会进行全局 BA,进一步优化地图,同时并不影 响实时性能。
1.4 Atlas 模块
一个由一系列离散地图组成的多子图系统。它会维护一个激活地图,用于tracking 线程对当前帧的定位,同时 local mapping 线程会利用新的关键帧信 息持续对该地图优化和更新。在 Atlas 中的其它地图被称为未激活地图。该系统基于词袋模型对关键帧信息建立数据库,用于重定位、闭环检测和地图融合。
2、IMU 和 Camera 数据融合获取位姿数据的过程
IMU 虽然可以测得角速度和加速度,但这些量都存在明显的漂移,使得积分 两次得到的位姿数据非常不可靠。但是,短时间内的快速运动,IMU 能够提供一 些较好的估计,这正是相机的弱点。当运动过快时,相机会出现运动模糊,或者 两帧之间重叠区域太少以至于无法进行特征匹配,所以纯视觉 SLAM 非常害怕快 速的运动。而有了 IMU,即使在相机数据无效的那段时间内,我们也能保持一个较好的位姿估计,这是纯视觉 SLAM 无法做到的。相比于 IMU,相机数据基本不 会有漂移,所以相机数据可以有效的估计并修正 IMU 读数中的漂移,使得在慢速运动后的位姿估计依然有效。当图像发生变化时,本质上我们没法知道是相机自 身发生了运动,还是外界条件发生了变化,所以纯视觉 SLAM 难以处理动态的障 碍物。而 IMU 能够感受到自己的运动信息,从某种程度上减轻动态物体的影响。主要流程如下:
(1) 利用相机和 IMU 分别进行图像采集和惯性数据采集,且 IMU 的采集频率大于 相机的采集频率;
(2) 提取相机获取的每一帧图像的特征点,然后提取特征点的描述子(ORB-SLAM 采用),匹配特征点;此处,还可以采用光流追踪的方法;
(3) 对 IMU 得到的多组 IMU 数据进行预积分,计算出两帧图像对应的 IMU 位置和 速度;
(4) IMU 初始化(讲解 ORB-SLAM3 采用的方法),这一步的目的是获取 IMU 参数较好的初始值:速度、重力以及 Bias。
1> Vision-Only
采用 ORB-SLAM 经典框架纯视觉初始化流程,按照关键帧速率 4Hz 持续运行2s,然后我们可以得到按比例缩放的地图,包括 10 个关键帧以及上百个地图点,然后通过 Visual-Only BA 进行优化。
2> Inertial-Only
这一步目的是获得 IMU 参数最优估计。利用前述单目视觉 SLAM 初始化后稳 定运行的数据,以及这些关键帧之间的 IMU 测量,包括:尺度因子、重力方 向、IMU 传感器偏置参数、关键帧的无尺度速度。这些 IMU 测量放在一起构 成状态向量,构建优化问题求解。一旦惯性优化完成,帧的姿态、速度以及 3D 地图点就会以估计的尺度进行缩放,同时旋转以使 z 轴与估计的重力方向对齐。
3> Visual-Inertial
一旦视觉以及 IMU 有了较好的估计后,进行一个联合优化进一步对这些参数进行精化。
(5) 结合上面得到的惯性残差和视觉残差,视觉-惯性 SLAM 可以看作是基于关键帧的最小化问题。在后期中,基于下式进行计算优化。

在 tracking 过程中,只优化最后两帧的位姿,同时保持地图点固定。在mapping 过程中,为了解决全图优化问题,若图的规模比较大就会比较棘手。ORB-SLAM3 采用了滑动窗口思想,把关键帧及其地图点的滑动窗口作为优化变量。
3、ORB-SLAM3 的基于特征点的 tracking 模块的优缺点,改善的机会点或方向
首先,ORB-SLAM3 视觉前端做法采用特征点提取+描述子匹配特征点的方式。因为有描述子,所以对地图的维护很方便(包括重定位、闭环、全局优化)。尤其是对室内环境,当视觉上共视关系较多的时候,这种方法能很大程度上提高定 位精度和局部稳定性。但这种方式也有缺点,每帧图像都要提取特征点数量的描述子,比较浪费时间。在 tarcking 过程中,如果运动过快(图像出现模糊),比较容易 tracking loss。此外,纯视觉 ORB-SLAM3 严重依赖特征点的提取与匹配 效果,在如纹理缺失的环境下运行会无法得到足够多的稳定匹配点对,此时光束平差法缺乏足够多的输入信息,无法有效地修正位姿偏差。基于这点,有很多人 也有不同的方法,还有一个主流方法是,特征点提取+光流跟踪的方式。采用这种方式tracking 要鲁棒一些,但这种方式不容易构建全局 map,同时在闭环和重定位阶段也需要另外提取特征点和描述子。同时,visual-inertial ORB- SLAM3 通过引入 IMU 来约束和修正特征缺失带来的偏差,得到尺度信息,在一定程度上解决了过度依赖严重依赖特征点问题。
ORB-SLAM3 引入了 Atlas 系统,在 tracking 过程中,如果跟丢了,可以利用当前帧查询 Atlas DBoW 数据库。这个查询可以利用所有先验信息,在所有地图 中找相似的关键帧。一旦有了候选关键帧,地图和匹配的地图点就可以进行重定位,极大提升性能,增大鲁棒性。
个人认为,ORB-SLAM3 此次更新的一大变化就是引入了 Atlas 地图,相当于 开辟了一条新的方向。当前由于只是第一个版本,所以在这方面的改进空间还有 很大,可以在这个方向做一些研究。同时 IMU 相比于 camera,有很多互补优势, 如何让 IMU 和 camera 更好的结合,发挥更好的效果,也是可以研究改进的点。IMU 初始化也有很多不足,采用一个更好的方法进行 IMU 初始化,也是一个可以改进的点。
本文仅做学术分享,如有侵权,请联系删文。
下载1
在「3D视觉工坊」公众号后台回复:3D视觉,即可下载 3D视觉相关资料干货,涉及相机标定、三维重建、立体视觉、SLAM、深度学习、点云后处理、多视图几何等方向。
下载2
在「3D视觉工坊」公众号后台回复:3D视觉github资源汇总,即可下载包括结构光、标定源码、缺陷检测源码、深度估计与深度补全源码、点云处理相关源码、立体匹配源码、单目、双目3D检测、基于点云的3D检测、6D姿态估计源码汇总等。
下载3
在「3D视觉工坊」公众号后台回复:相机标定,即可下载独家相机标定学习课件与视频网址;后台回复:立体匹配,即可下载独家立体匹配学习课件与视频网址。
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、orb-slam3等视频课程)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近2000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、可答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~ 







 京公网安备 11010802041100号
京公网安备 11010802041100号