一些目标跟踪领域的benchmark,后期将会保持更新。
参考:Online Object Tracking: A Benchmark
MOT16:A Benchmark for Multi-Object Tracking
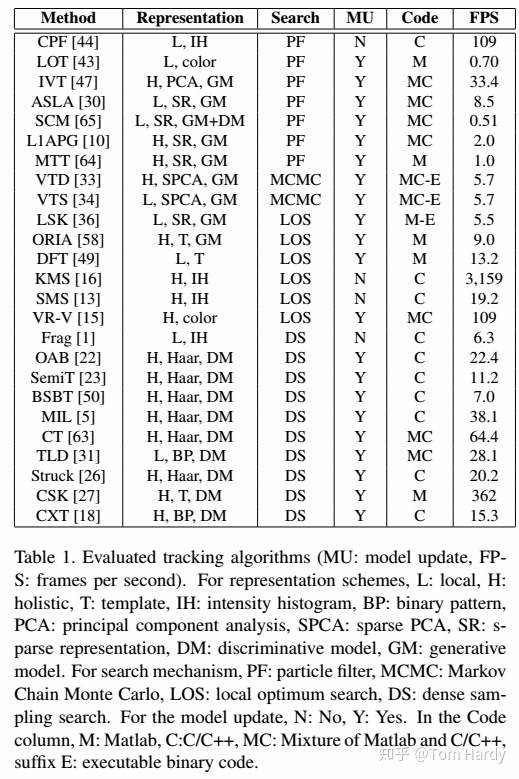
传统方式
主要是一些特征提取+滤波类搜索算法。
其中特征提取主要有:局部、全局特征、模板、直方图、binary pattern、PCA、sparse PCA、SR(sparse representation)、 discriminative model、generative model。
对于搜索机制:CSK、KCF/DCF、CN、粒子滤波、马尔可夫链蒙特卡罗法、局部最优搜索、密集抽样搜索。
深度学习方式
1、tracking-by-detection方式
主要针对目标检测算法和滤波类算法(多目标跟踪),yolo系列、SSD系列、anchor-free系列、two-stage系列等等,滤波类和上述传统方式相似。
2、基于Siamese Networks(生成式,主要针对单目标)
主要通过Siamese网络进行相似度匹配,主要操作为:首先手动选择初始图像中的目标,使用Siamese网络进行特征提取,然后以此特征为标准,遍历后面帧图像的每个位置,对每个位置进行特征提取,然后做比较,确定位置。
端到端方式
主要通过深度学习方式(RNN和LSTM),不过该方式速度较慢,相比于传统方式效果也没有很大的提升,现阶段几乎没有落地。
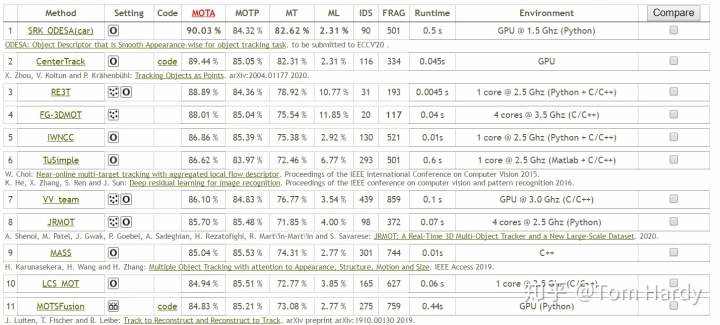
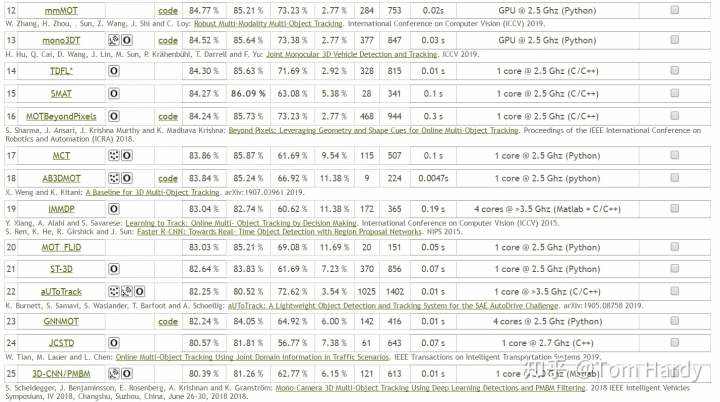
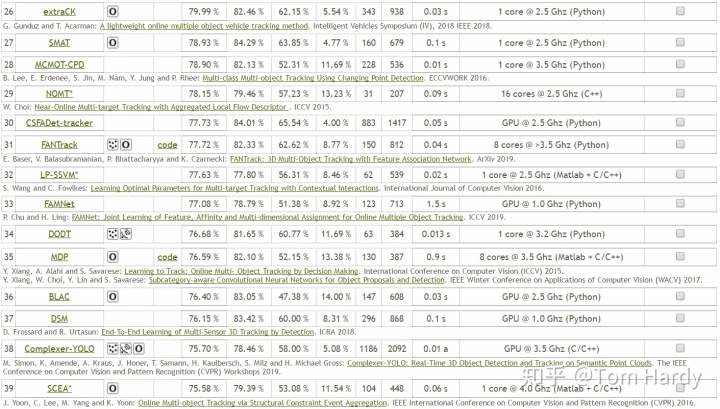
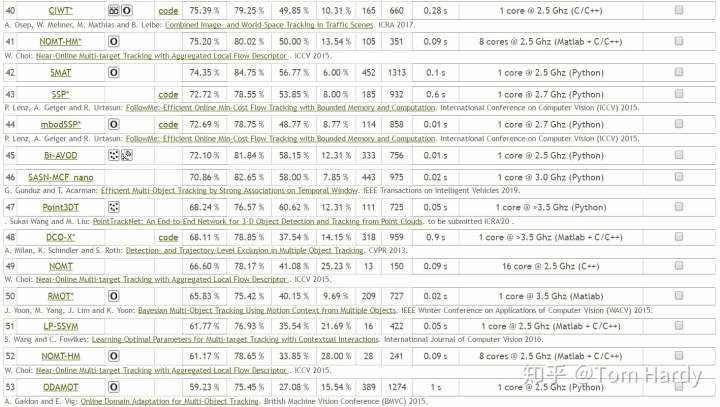
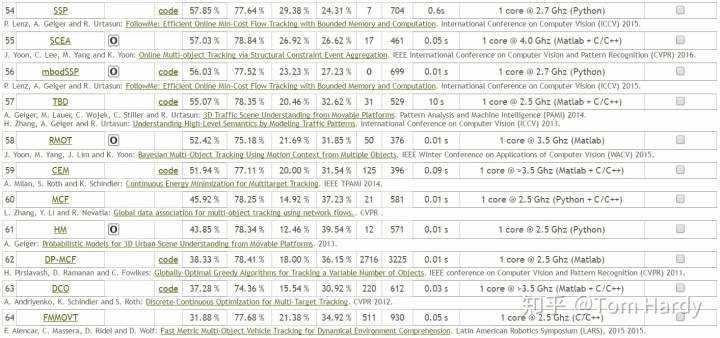
KITTI上的目标跟踪算法(benchmark)
往期干货资源:
汇总 | 国内最全的3D视觉学习资源,涉及计算机视觉、SLAM、三维重建、点云处理、姿态估计、深度估计、3D检测、自动驾驶、深度学习(3D+2D)、图像处理、立体视觉、结构光等方向!
汇总 | 3D目标检测(基于点云、双目、单目)
汇总 | 6D姿态估计算法(基于点云、单目、投票方式)
汇总 | 三维重建算法实战(单目重建、立体视觉、多视图几何)
汇总 | 3D点云后处理算法(匹配、检索、滤波、识别)
汇总 | SLAM算法(视觉里程计、后端优化、回环检测)
汇总 | 深度学习&自动驾驶前沿算法研究(检测、分割、多传感器融合)
汇总 | 相机标定算法
汇总 | 事件相机原理
汇总 | 结构光经典算法
汇总 | 缺陷检测常用算法与实战技巧






 京公网安备 11010802041100号
京公网安备 11010802041100号