摘要
生成式对抗网络模型(GAN)是基于深度学习的一种强大的生成模型,可以应用于计算机视觉、自然语言处理、半监督学习等重要领域。生成式对抗网络最最直接的应用是数据的生成,而数据质量的好坏则是评判GAN成功与否的关键。本文介绍了GAN最初被提出时的基本思想,阐述了其一步步演化、改进的动机和基本思想以及原理,从基于模型改进的角度介绍了WGAN,WGAN-GP,LSGAN,f-GAN,LS-GAN以及GLS-GAN,EBGAN,BEGAN等GAN发展过程中较为重要的改进模型,以及从应用创新角度介绍了CGAN,InfoGAN,Pix2Pix,CycleGAN,StarGAN等较为常用或热门的GAN的应用方法。此外,本文还介绍了GAN的几种应用,包括图像翻译,语言翻译以及基于GAN的辅助驾驶等。最后本文还介绍了GAN的主要发展和研究方向,提出了GAN现在以及将来发展的热点与难点等,如如何提高图片的质量,避免模式崩塌等。
关键词
深度学习 生成式对抗网络 卷积神经网络 Wasserstein距离 对抗训练
deep learning, generate adversial network, convolutionalneural network, Wasserstein Distance, adversial training
引言
近年来,人工智能与深度学习已经成为耳熟能详的名词。一般而言,深度学习模型可以分为判别式模型与生成式模型。由于反向传播(Back propagation, BP)、Dropout等算法的发明,判别式模型得到了迅速发展。然而,由于生成式模型建模较为困难,因此发展缓慢,直到近年来最成功的生成模型——生成式对抗网络的发明,这一领域才焕发新的生机。
生成式对抗网络(Generative adversarial network, GAN)自Ian Goodfellow[1]等人提出后,就越来越受到学术界和工业界的重视。而随着GAN在理论与模型上的高速发展,它在计算机视觉、自然语言处理、人机交互等领域有着越来越深入的应用,并不断向着其它领域继续延伸。因此,本文将对GAN的理论与其应用做一个总结与介绍。
GAN的基本思想
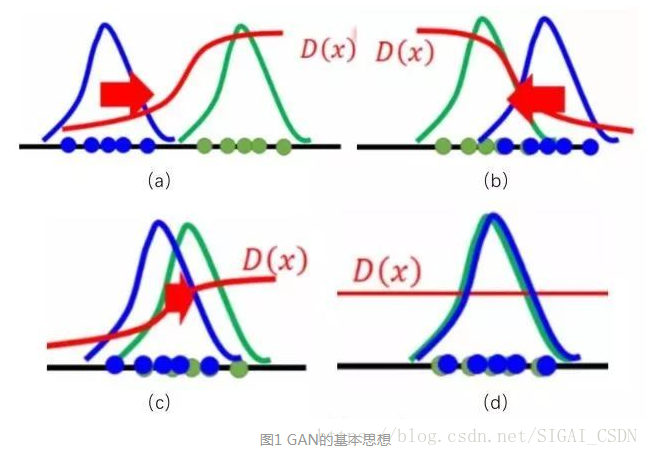
如果将真实数据和生成数据服从两个分布,那么如图所示
蓝色分布为生成分布,绿色分布为真实分布,D为判别器,GAN从概率分布的角度来看,就是通过D来将生成分布推向真实分布,紧接着再优化D,直至到达图1(d)所示,到达Nash均衡点,从而生成分布与真实分布重叠,生成极为接近真实分布的数据。
GAN的基本模型
设z为随机噪声,x为真实数据,生成式网络和判别式网络可以分别用G和D表示,其中D可以看作一个二分类器,那么采用交叉熵表示,可以写作:
minGmaxDVD,G=Ex~pdata(x)logDx+Ez~pzz[log(1-D(G(z)))]
其中第一项的logD(x)表示判别器对真实数据的判断,第二项log(1−D(G(z)))表示则对数据的合成与判断。通过这样一个极大极小(Max-min)博弈,循环交替地分别优化G和D来训练所需要的生成式网络与判别式网络,直到到达Nash均衡点。
GAN与Jensen-Shannon散度
对于原目标函数,在生成器G固定参数时,可以得到最优的判别器D。对于一个具体的样本,它可能来自真实分布也可能来自生成分布,因此它对判别器损失函数的贡献是:
-PrxlogDx-Pg(x)log[1-D(x)]
其中pr为真实分布,pg为生成分布。令上式关于D(x)的导数为0,可以得到D(x)的全局最优解为:
D*x=Pr(x)Prx+Pg(x)
对于gan 的生成器的优化函数可以写成:
Ex~PrlogDx+Ex~Pglog[1-D(x)]
将最优判别器代入,可以得到生成器的优化函数为:
Ex~PrlogPr(x)Prx+Pg(x)+Ex~PglogPg(x)Prx+Pg(x) (1)
此处简单回顾一下JS散度与KL散度:
KL(P1|P2=Ex~P1logP1(x)P2(x)
JS(P1|P2=12KL(P1|P1+P22+12KL(P2||P1+P22)
Ex~PrlogPr(x)12(Prx+Pgx)+Ex~PglogPg(x)12(Prx+Pgx)-2log2=JS(Pr|Pg-2log2
综上,可以认为,当判别器过优时,生成器的loss可以近似等价于优化真实分布与生成器产生数据分布的JS散度。
生成器与判别器的网络
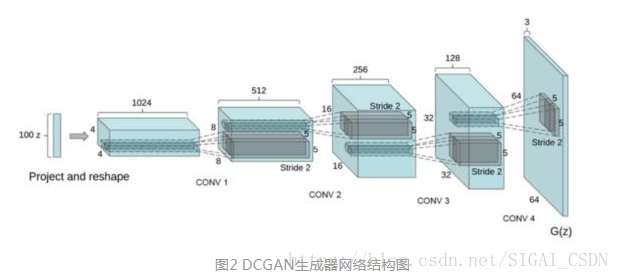
由于卷积神经网络(Convolutional neural network, CNN)比MLP有更强的拟合与表达能力,并在判别式模型中取得了很大的成果。因此,Alec等人[2]将CNN引入生成器和判别器,称作深度卷积对抗神经网络(Deep Convolutional GAN, DCGAN)。图2为DCGAN生成器结构图。本质上,DCGAN是在GAN的基础上提出了一种训练架构,并对其做了训练指导,比如几乎完全用卷积层取代了全连接层,去掉池化层,采用批标准化(Batch Normalization, BN)等技术,将判别模型的发展成果引入到了生成模型中。此外,[2]还并强调了隐藏层分析和可视化计数对GAN训练的重要性和指导作用。
DCGAN虽然没有带来理论上以及GAN上的解释性,但是其强大的图片生成效果吸引了更多的研究者关注GAN,证明了其可行性并提供了经验,给后来的研究者提供了神经网络结构的参考。此外,DCGAN的网络结构也可以作为基础架构,用以评价不同目标函数的GAN,让不同的GAN得以进行优劣比较。DCGAN的出现极大增强了GAN的数据生成质量。而如何提高生成数据的质量(如生成图片的质量)也是如今GAN研究的热门话题。
然而,GAN自从2014年提出以来,就存在着训练困难、不易收敛、生成器和判别器的loss无法指示训练进程、生成样本缺乏多样性等问题。从那时起,很多研究人员就在尝试解决,并提出了改进方案,切实解决了部分问题,如生成器梯度消失导致的训练困难。当然也还有很多问题亟待解决,如生成样本的评价指标问题。本文将简单阐述几个较为突出的的改进措施。
WGAN
针对这种现象,Martin Arjovsky等人利用Wasserstein-1距离(又称Earth Mover距离)来替代朴素GAN所代表的Jensen-Shannon散度[3]。Wasserstein距离是从最优运输理论中的Kantorovich问题衍生而来的,可以如下定义真实分布与生成分布的Wasserstein-1距离:
其中pr,pg分别为真实分布与生成分布,γ为pr,pg分的联合分布。相较于Jensen-Shannon散度,Wasserstein-1距离的优点在于,即使pr,pg互不重叠,Wasserstein距离依旧可以清楚地反应出两个分布的距离。为了与GAN相结合,将其转换成对偶形式:
从表示GAN的角度理解,fw表示判别器,与之前的D不同的是,WGAN不再需要将判别器当作0-1分类将其值限定在[0,1]之间,fw越大,表示其越接近真实分布;反之,就越接近生成分布。此外,||f||L ≤ 1表示其Lipschitz常数为1。显然,Lipschitz连续在判别器上是难以约束的,为了更好地表达Lipschitz转化成权重剪枝,即要求参数w ∈ [−c, c],其中为常数。因而判别器的目标函数为:
其中w ∈ [−c, c],生成器的损失函数为:
WGAN的贡献在于,从理论上阐述了因生成器梯度消失而导致训练不稳定的原因,并用Wasserstein距离替代了Jensen-Shannon散度,在理论上解决了梯度消失问题。此外,WGAN还从理论上给出了朴素GAN发生模式坍塌(mode collapse)的原因,并从实验角度说明了WGAN在这一点上的优越性。最后,针对生成分布与真实分布的距离和相关理论以及从Wasserstein距离推导而出的Lipschitz约束,也给了后来者更深层次的启发,如基于Lipschitz密度的 损失敏感GAN(loss sensitive GAN, LS-GAN)。
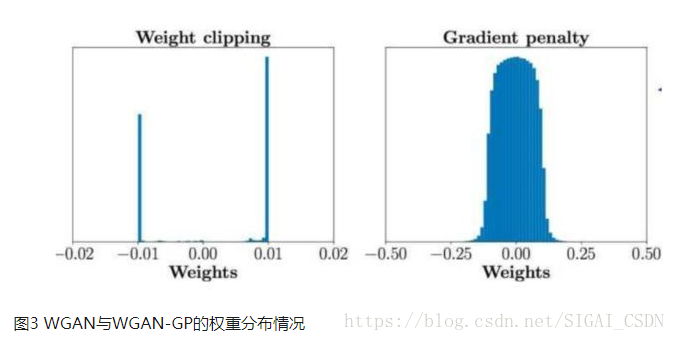
WGAN—GP
因而,WGAN的目标函数可以写作
此外,生成器的目标函数与WGAN相同,取第二项进行优化即可。
WGAN-GP的贡献在于,它用正则化的形式表达了对判别器的约束,也为后来GAN的正则化模型做了启示。此外WGAN-GP基本从理论和实验上解决了梯度消失的问题,并且具有强大的稳定性,几乎不需要调参,即在大多数网络框架下训练成功率极高。
LSGAN
生成器的目标函数如下:
这里a, b, c满足b − c = 1和b − a = 2。根据[6],它等价于f散度中的散度x2,也即是说,LSGAN用散度x2取代了朴素GAN的Jensen-Shannon散度。
最后,LSGAN的优越性在于,它缓解了GAN训练时的不稳定,提高了生成数据的质量和多样性,也为后面的泛化模型f-GAN提供了思路。
f-GAN
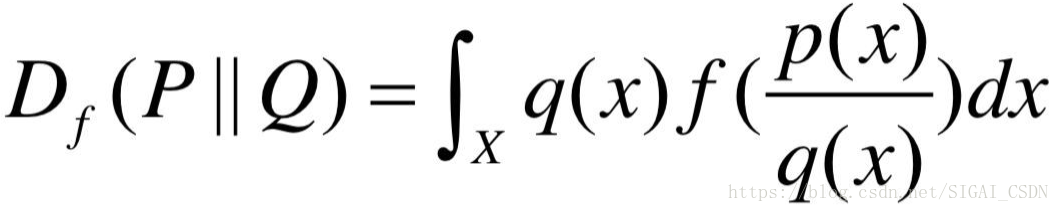
由于朴素GAN所代表的Jensen-Shannon散度和前文提到的LSGAN所代表的x2散度都属于散度的特例,那么自然而然地想到,其它f散度所代表的GAN是否能取得更好的效果。实际上,这些工作早已完成[7],时间更是早过WGAN与LSGAN。甚至可以认为,是f-GAN开始了借由不同散度来代替Jensen-Shannon散度,从而启示了研究者借由不同的距离或散度来衡量真实分布与生成分布。首先衡量p(x), q(x)的f散度可以表示成如下形式:
其中下半连续映射f:R+→R,通过各种特定的函数f,可以得到不同的散度。其结果如表1所示:
表1 f-GAN中基于不同散度的结果
此外,f-GAN还可以得到如下的泛化模型,其目标函数如下:
其中vw是判别器的输出函数,gf是最后一层的激活函数,f*是f的共轭凸函数,以朴素GAN为例,当Dωx=11+exp-Vx,gfv=-log(1+e-v),时,上式即为朴素GAN的目标函数。
LS-GAN(损失敏感GAN)与GLS-GAN
与前文提到的LSGAN (least square GAN)不同,这里的LS-GAN是指Loss-Sensitive GAN,即损失敏感GAN。一般认为,GAN可以分为生成器G和判别器D。与之不同的是,针对判别器D,LS-GAN想要学习的是损失函数Lθ(x),要求Lθ(x)在真实样本上尽可能小,在生成样本上尽可能大。由此,LS-GAN基于损失函数的目标函数为:
生成器的目标函数为:
此处∆(x, zG )是来自约束假设Lθ(x) ≤ Lθ ( zG) − ∆(x, zG),表示真实的样本要与生成样本间隔∆(x,zG)的长度,如此LS-GAN就可以将Lθ用于提高距离真实样本较远的样本上,可以更合理的发挥LS-GAN的建模能力。
最后,Qi等人还对LS-GAN做了推广,将其扩展为GLS-GAN(Generalized LS-GAN)。所谓的GLS-GAN,就是将损失函数Lθ的目标函数扩展为:
此处Cv (a) = max{a, va},其中v∈ [−∞, 1]。可以证明,当v = 0时,GLS-GAN就是前文的LS-GAN。另外,当v = 1时,可以证明,GLS-GAN就是WGAN。所以,Qi认为,LS-GAN与WGAN都是GLS-GAN的一种特例。
EBGAN
朴素GAN提出将二分类器作为判别器以判别真实数据和生成数据,并将生成数据“拉向”生成数据。然而自从WGAN抛弃了二分类器这个观点,取以函数fw代替,并不将之局限在[0,1]之后,很多改进模型也采取了类似的方法,并将之扩展开来。例如LS-GAN以损失函数Lθ(x)作为目标,要求Lθ(x)在真实样本上尽可能小,在生成样本尽可能大。
基于能量的GAN(Energy-based GAN, EBGAN)则将之具体化了。它将能量模型以及其相关理论引入GAN,以“能量”函数在概念上取代了二分类器,表示对真实数据赋予低能量,对生成数据赋予高能量。
首先,EBGAN给出了它的目标函数
LDz=D(G(z))
其中[∙]+ = max{0,∙},极大化LD的同时极小化LG。EBGAN的设计思想是,一方面减少真实数据的重构误差,另一方面,使得生成数据的重构误差趋近于m,即当D(G(z))
此外在EBGAN中,对D的结构也做了改进。不再采用DCGAN对D的网络框架或者其相似结构,EBGAN对D的架构采用自动编码器的模式,模型架构如图所示
图4 EBGAN模型架构
可以发现,其判别器或者说能量函数D可以写作
其中Enc,Dec是自编码器中的编码与解码操作。
最后,由于自编码器的特殊构造,EBGAN还针对LG做了特殊设计,即增加一个正则项fPT来避免模式崩溃(mode collapse)问题。设s∈Rs×N是一个batch的编码器(encoder)输出结果,fPT可以定义为
其思想很简单,利用一个批次的编码器输出结果计算余弦距离并求和取均值,若这一项越小,则两两向量越接近正交。从而解决模式崩溃问题,不会出现一样或者极其相似的图片数据。
以上的GAN在本质上的目标是让真实分布pr与生成分布pg尽量接近,大多数GAN之间可以解释成其区别在于衡量方式不同,比如朴素GAN的Jensen-Shannon散度,WGAN的Wasserstein距离,f-GANs的f散度等等。
特殊的是,边界平衡GAN(Boundary Equilibrium Generative Adversarial Networks, BEGAN)颠覆了这种思路,虽然它是基于WGAN与EBGAN上发展而来的。
首先,设D为判别函数,其结构采用上一节中EBGAN上的自编码器的模式,即
另外,设μ1,μ2为D(x)与D(G(z))的分布,其中x即为输入的样本图片,G(z)为生成图片,那么真实分布pr与生成分布pg之间的Wasserstein距离如下
设m1,m2为μ1,μ2的期望,根据Jensen不等式,有
由此,BEGAN的特殊性在于,它优化的不是真实分布pr与生成分布pg之间的距离,而是样本图片和生成图片下的判别函数的分布之间的Wasserstein下界。
要计算Wasserstein下界,就要最大化|m1 − m2|,显然它至少有两个解,极大化m1,极小化m2或者极大化m2,极小化m1,此处取后一种,即可从优化Wasserstein下界的角度看待GAN下的优化,即
上式均取极小值,前者LD优化θD,极大化m2,极小化m1,由此计算Wasserstein下界;后者LG优化θG,极小化m2,由此优化Wasserstein下界。
当真实分布pr与生成分布pg相等时,显然满足上式。但是在训练时,并不是两者完全重叠最佳,LS-GAN在设计时就有这种思想。同样,BEGAN在设计时选择通过超参γ∈[0,1]来放宽均衡点
即生成样本判别损失的期望与真实样本判别损失的期望值之比。而此处之所以让判别器设计成自编码其的模式,是因为判别器有两个作用:1.对真实图片自编码;2. 区分生成图片与真实图片。超参γ的特殊之处在于,它能平衡这两个目标:γ值过低会导致图片多样性较差,因为判别器太过关注对真实图片自编码;反之,图片视觉质量则会不佳。
由此,可以BEGAN的目标函数如下
其中kt初始化为0,λk为学习率(learning rate)。
此外,BEGAN的另一个卓越效果是,它的网络结构极为简单,不需要ReLU,minbatch,Batch Normalization等非线性操作,但其图片质量远远超过与其结构相近的EBGAN。
前文除了DCGAN,其余的改进都是基于目标函数。如果不考虑InfoGAN,CGAN和Auto-GAN等当下流行的GAN模型,可以将针对目标函数的改进分为两种,正则化与非正则化。如图所示:
图5 基于loss改进的GAN的分类
一般认为,到目前为止,GLS-GAN有更好的建模能力。而GLS-GAN的两种特例LS-GAN和WGAN都是建立在Lipschitz连续函数空间中进行训练。而对判别器或损失函数而言,至今也尚未发现比Lipschitz约束更好的限制判别能力的条件,这也可能是今后研究的难点。
GAN的应用模型改进
以上对GAN的改进可以说是对GAN基础的改进。然而基础的GAN有时在实际中是不足以满足我们对生成数据的要求。例如,有时侯我们会要求生成指定的某类图像,而不是随意模拟样本数据,比如生成某个文字;有时我们要求对图像某些部分做生成替换,而不是生成全部的图像,比如消除马赛克。基于这些实际生活上的要求,GAN也需要对模型的结构做出调整,以满足生成我们需要的数据。
cGAN
其模型结构图如下:
图6 CGAN的结构图
InfoGAN
InfoGAN(MutualInformation)本质上也可以看作是一种cGAN。从出发点看,InfoGAN是基于朴素GAN改进的。它将原先生成器上输入的z进行分解,除了原先的噪声z以外,还分解出一个隐含编码c。其中c除了可以表示类别以外,还可以包含多种变量。以MNIST数据集为例,还可以表示诸如光照方向,字体的倾斜角度,笔画粗细等。InfoGAN的基本思想是,如果这个c能解释生成出来的G(z,c),那么c应该与G(z,c)由高度的相关性。在InfoGAN中,可以表示为两者的互信息,目标函数可以写作
然而在互信息I(c; G(z, c))的优化中,真实的P(c|x)很难计算,因此作者采用了变分推断的思想,引入了变分分布Q(c|x)来逼近P(c|x),
如此可以定义变分下界为
这样InfoGAN的目标函数可以写作
从模型结构上,可以表示成如下所示
图7 InfoGAN模型结构示意图
Q通过与D共享卷积层,计算花销大大减少。此外,Q是一个变分分布,在神经网络中直接最大化,Q也可以视作一个判别器,输出类别c。
InfoGAN的重要意义在于,它通过从噪声z中拆分出结构化的隐含编码c的方法,使得生成过程具有一定程度的可控性,生成结果也具备了一定的可解释性。
Pix2Pix
Pix2Pix将生成器看作是一种映射,即将图片映射成另一张需要的图片,所以才将该算法取名为Pix2Pix,表示map pixels to pixels,即像素到像素的映射。这种观点也给了后来研究者改进的想法和启发。
因此,生成器输入除随机数z以外,将图片x(如灰度图,素描图等)作为条件进行拼接,输出的是转换后的图片(如照片)。而判别器输入的是转换后的图片或真实照片,特别之处在于,文章发现,判别器也将生成器输入的图片x作为条件进行拼接,会极大提高实验的结果,其结构图如下所示(此处结构图隐去了生成器的随机数z)
图8 Pix2Pix模型结构示意图
Pix2Pix的目标函数分为两部分,首先是基于CGAN的目标函数,如下式所示,
此外,还有生成的图像与原图一致性的约束条件
将之作为正则化约束,所以Pix2Pix的目标函数为
Pix2Pix成功地将GAN应用于图像翻译领域,解决了图像翻译领域内存在的众多问题,也为后来的研究者做了重要的启发。
CycleGAN
然而,Pix2Pix致命的缺点在于,Pix2Pix的训练需要相互配对的图片x与y,然而,这类数据是极度缺乏的,也为极大限制了Pix2Pix的应用。
对此,CycleGAN提出了不需要配对的数据的图像翻译方法。
设X,Y为两类图像,px,py为两类图像间的相互映射。CycleGAN由两对生成器和判别器组成,分别为GX→Y,DY与GY→X,DX,若以wgan为基础,那么对Y类图像,有
同样,对X类图像,有
此外,Cycle以及CycleGAN中较为重要的想法循环一致性(Cycle-Consistent),这也是CycleGAN中Cycle这一名称的由来。循环一致性也可以看作是Pix2Pix一致性约束的演变进化,其基本思想是两类图像经过两次相应的映射后,又会变为原来的图像。因此,循环一致性可以写作
因此,优化问题可以写成
其中λc为常数。
CycleGAN的成功之处在于,他们用如此简单的模型,成功解决了图像翻译领域面临的数据缺乏问题。不需要配对的两个场景的相互映射,实现了图像间的相互转换,是图像翻译领域的又一重大突破。
StarGAN
针对这种困境,StarGAN解决了这类问题。如下图所示,StarGAN希望能够通过一个生成器解决所有跨域类别问题。
图9 跨域模型(如CycleGAN等)与StarGAN
针对于此,StarGAN在生成器与判别器的设计以及模型结构上如下图所示:
图10 StarGAN模型结构示意图
模型中(a)-(d)的要求如下:
(a)D学会区分真实图像和生成图像,并将真实图像分类到其对应的域。因此,对D而言,实际上是由两部分组成的,即D:x→{Dsrcx;Dcls(x)};
(b)拼接目标标签与输入图片,将之输入G,并生成相应的图像;
(c)在给定原始域标签的情况下,G要尽量能重建原始图像。这与CycleGAN的循环一致性一脉相承;
(d)这一点与一般的GAN相同,G要尽量生成与真实图像相似的图像,但同时又尽量能被D区分出来。
从目标函数上来看,首先判别器的目标函数,要求满足GAN的结构,即
此外,还要就判别器能将真实图像分类到相应的域,
针对生成器,除了Ladv对应的GAN的结构外,还要求判别器能将生成图像分类到相应的域
此外,还要求尽量能重建原始图像
其中,c′为原始图像对应的类别。如此,可以得到判别器的目标函数
以及生成器的目标函数为
其中λcls,λrec均为常数。
GAN最直接的应用在于数据的生成,也就是通过GAN的建模能力生成图像、语音、文字、视频等等。而如今,GAN最成功的应用领域主要是计算机视觉,包括图像、视频的生成,如图像翻译、图像上色、图像修复、视频生成等。此外GAN在自然语言处理,人机交互领域也略有拓展和应用。本章节将从图像领域、视频领域以及人机交互领域分别介绍GAN的相关应用。
图像领域
此外,很多的GAN技术也有将文字描述转换成图片,根据轮廓图像生成接近真实的照片等等功能。
视频领域
此外,Vondrick[11]等人在视频领域也取得了巨大进展,他们能生成32帧分辨率为64×64 的逼真视频,描绘的内容包括高尔夫球场、沙滩、火车站以及新生儿。经过测试,20%的标记员无法识别这些视频的真伪。
人机交互领域
Santana等人实现了利用GAN 的辅助自动驾驶。首先,生成与真实交通场景图像分布一致的图像,然后,训练一个基于循环神经网络的转移模型来预测下一个交通场景。
另外,GAN还可以用于对抗神经机器翻译,将神经机器翻译(neural machine translation, NMT)作为GAN 的生成器,采用策略梯度方法训练判别器,通过最小化人类翻译和神经机器翻译的差别生成高质量的翻译。
GAN由于其强大的生成能力,正被广泛地研究与关注。目前,在学术领域,目前GAN训练指标,模式坍塌以及模型的生成能力的可解释性正受广泛的关注。最后,在拓展应用领域,由于生成的图片有较高的噪音,如何提高数据(图片或视频等)也是研究的一大热点。此外,GAN作为一种深度模型,也是解决自然语言处理(Natural Language Processing, NLP)天然的良好模型。如何将GAN应用在NLP领域也是下一步要解决的问题。
参考文献:
[2] Radford A, Metz L, Chintala S. Unsupervised Representation Learning with Deep Convolutional Generative Adversarial Networks[J]. Computer Science, 2015.
[3] Arjovsky M, Bottou L. Towards Principled Methods for Training Generative Adversarial Networks[J]. 2017.
[4] Arjovsky M, Chintala S, Bottou L. Wasserstein GAN[J]. 2017.
[5] Gulrajani I, Ahmed F, Arjovsky M, et al. Improved Training of Wasserstein GANs[J]. 2017.
[6] Mao X, Li Q, Xie H, et al. Least Squares Generative Adversarial Networks[C]// IEEE International Conference on Computer Vision. IEEE Computer Society, 2017:2813-2821.
[7] Nowozin S, Cseke B, Tomioka R. f-GAN: Training Generative Neural Samplers using Variational Divergence Minimization[J]. 2016.
[8] Qi G J. Loss-Sensitive Generative Adversarial Networks on Lipschitz Densities[J]. 2017.
[9] Salimans T, Goodfellow I, Zaremba W, et al. Improved Techniques for Training GANs[J]. 2016.
[10] Mathieu M, Couprie C, Lecun Y. Deep multi-scale video prediction beyond mean square error[J]. arXiv: arXiv1511.05440, 2015.
[11] Vondrick C, Pirsiavash H, Torralba A. Generating videos with scene dynamics[C]//Conferrence on Neural Information Processing Systems. 2016: 613-621.
[12] Wu L, Xia Y, Zhao L, et al. Adversarial neural machine translation [J]. arXiv: arXiv1704.06933, 2017.








 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有