篇首语:本文由编程笔记#小编为大家整理,主要介绍了G-LiHT数据介绍相关的知识,希望对你有一定的参考价值。
时光荏苒,已然踏入2022年,新的一年里,继续努力前行!不断进步! 新年第一篇,注重质量,近万字长文,介绍一种激光雷达数据G-LIHT。
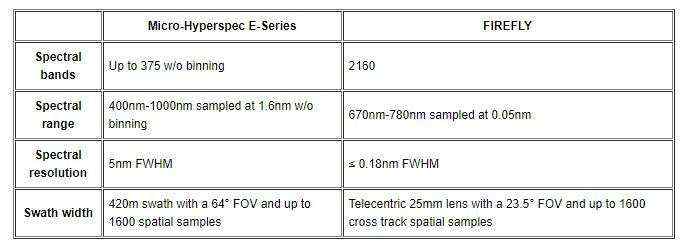
G-LiHT是Goddard’s LiDAR, Hyperspectral & Thermal Imager(Goddard 的 LiDAR、高光谱和热成像仪) 的缩写。 G-LiHT 是一种便携式机载成像系统,它使用以下方法同时绘制陆地生态系统的组成、结构和功能:
G-LiHT 通过提供时间和空间上的重合数据来实现数据融合研究&#xff0c;并提供许多生态系统研究所需的大面积精细 (<1 m) 观测数据。
使用扫描 LiDAR、高光谱和热红外成像研究地球表面的组成、结构和功能。
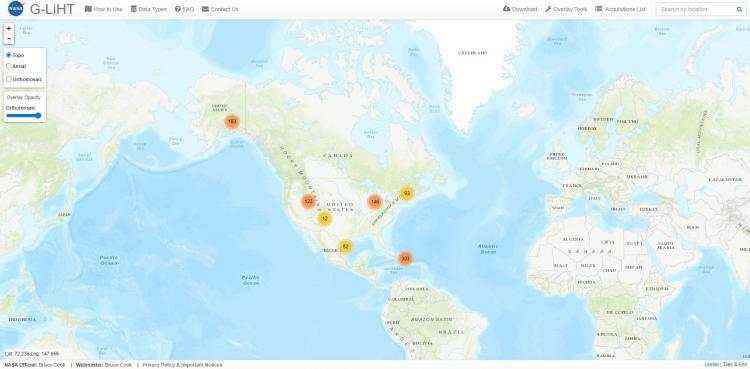
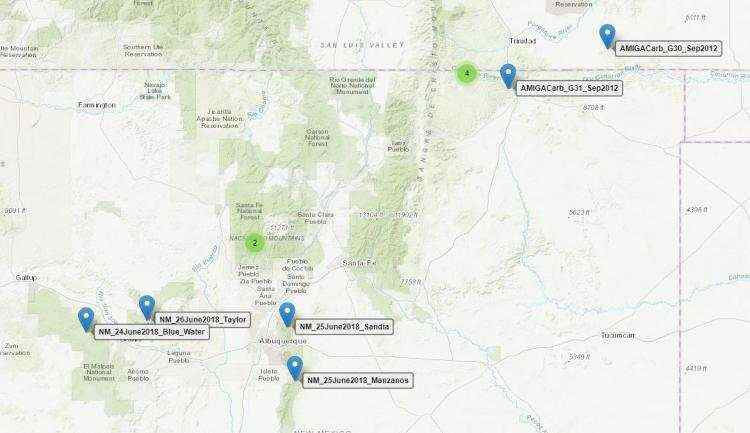
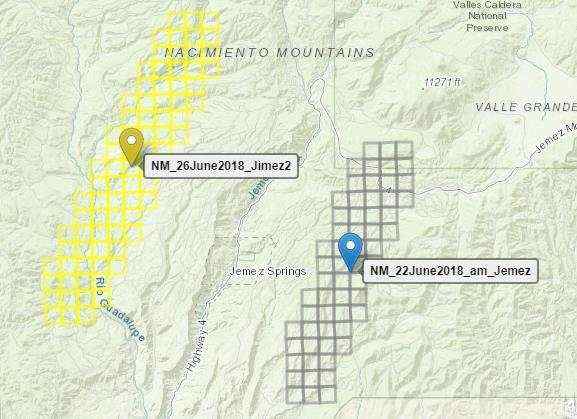
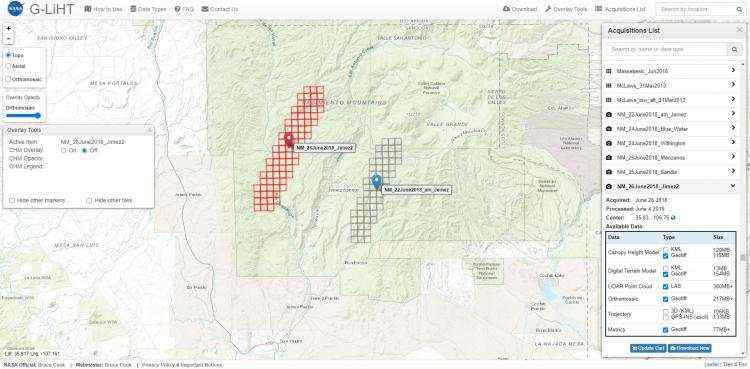
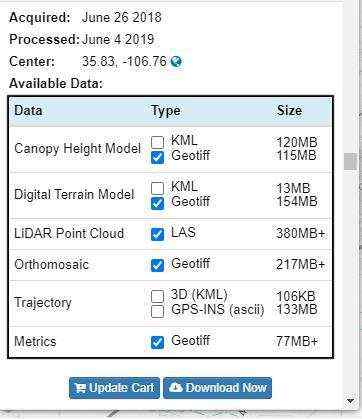
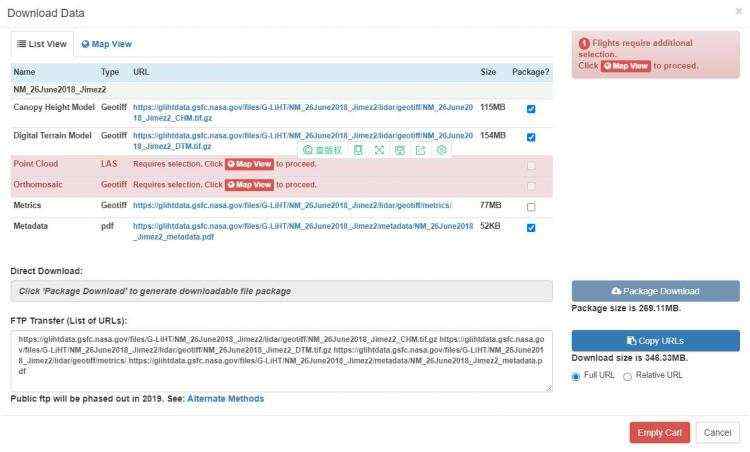
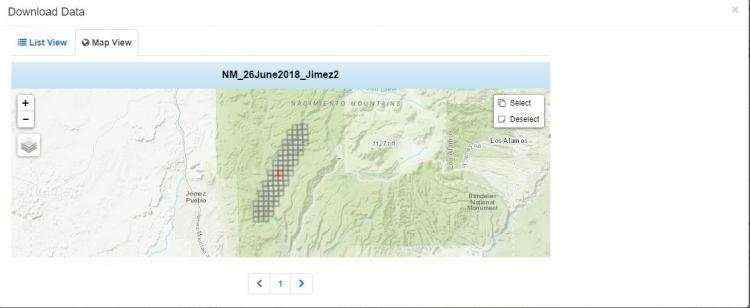
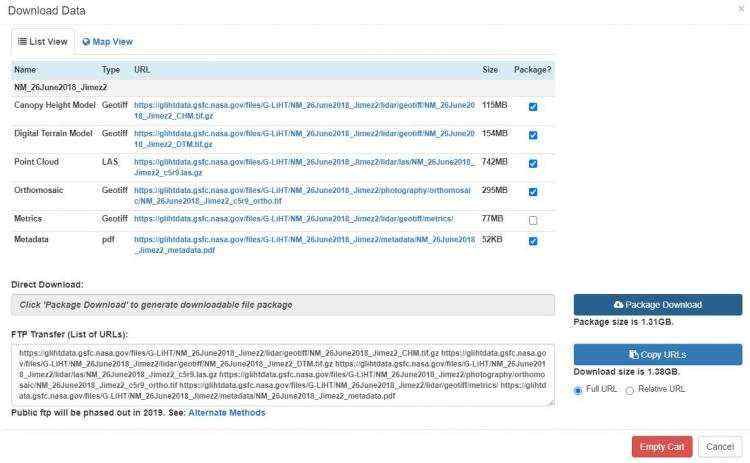
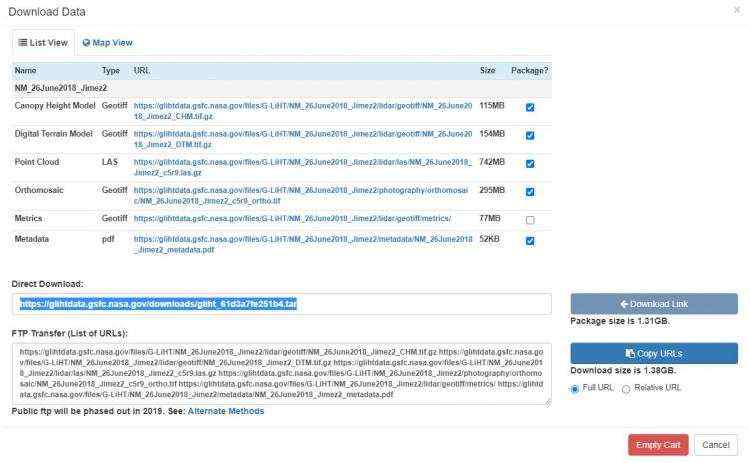
G-LiHT下载地址&#xff1a;https://glihtdata.gsfc.nasa.gov 无需注册 目前这个数据主要分布在北美洲*美国、墨西哥古巴等&#xff0c;如图中圆圈显示数据的区域。 点击圆圈放大可以查看数据分布区域&#xff1a; 继续放大可以看到具体分布区域&#xff1a; 点击数据区域&#xff08;格网区&#xff09;&#xff1a; G-LIHT数据类型有很多种: 点击下载按钮&#xff1a; Point Cloud 和Orthomosaic数据需要使用Map View点击选择小格网激活下载&#xff1a; 点击打包下载按钮下载,准备下载中…… 按钮左边出现下载链接地址。点击链接进行数据下载。
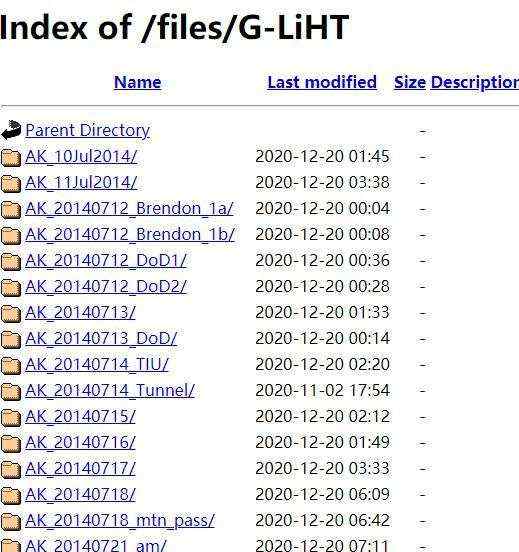
下载地址2https://glihtdata.gsfc.nasa.gov/files/G-LiHT/这里直接点击文件列表下载&#xff0c;这里不做详细介绍了。
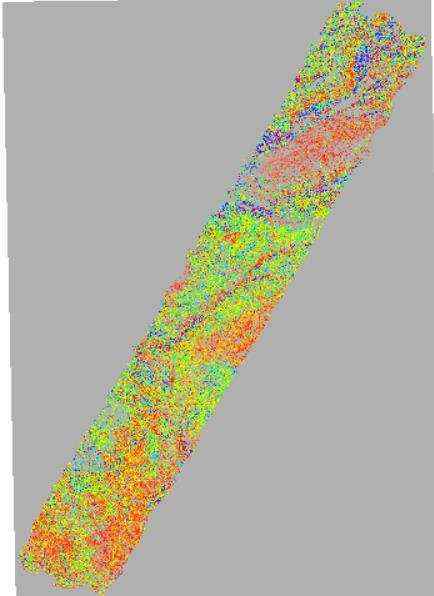
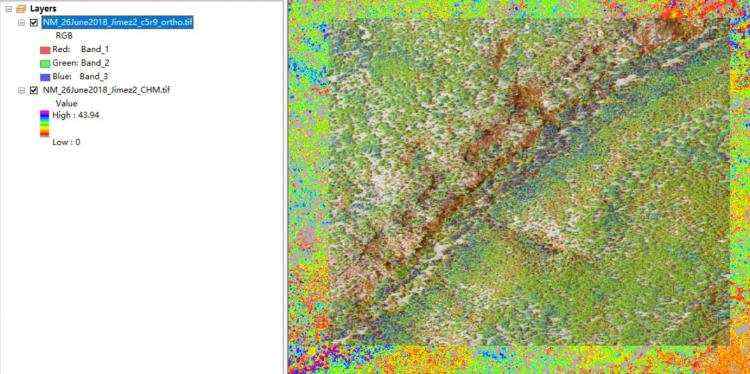
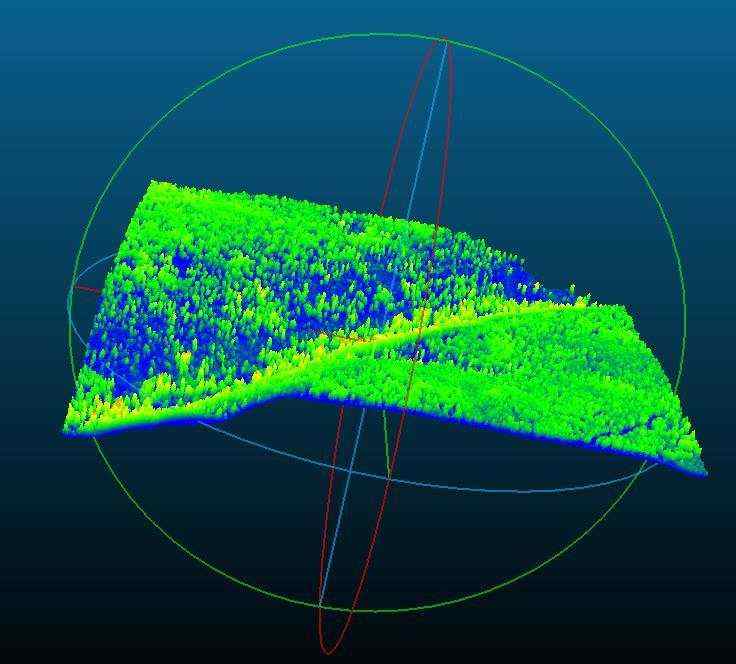
解压文件如下&#xff1a; \\photography\\orthomosaic路径下的NM_26June2018_Jimez2_c5r9_ortho.tif文件显示如下&#xff1a; 解压查看LAS雷达数据显示如下&#xff1a; 两个数据叠加显示&#xff08;35%透明度&#xff09;&#xff0c;正射图和雷达图完全匹配。 解压点云数据查看&#xff1a; 使用ENVI LiDAR 打开数据&#xff0c;数据量比较大&#xff0c;需要一点时间。 也可以使用Cloud Compare V2.12 beta 打开&#xff0c;显示速度稍快&#xff0c;但是默认显示效果感觉ENVI根号更好一点。
希望本文对大家有所帮助&#xff0c;数据资源我已上传CSDN资源,由于数据量大&#xff0c;分两个上传&#xff0c;第一个是雷达数据(https://download.csdn.net/download/soderayer/73719733)&#xff1b; 第二个是正射镶嵌影像数据&#xff1a;(https://download.csdn.net/download/soderayer/73718307)&#xff1b; 欢迎大家下载学习。 最后&#xff0c;求三连&#xff01;





 \\photography\\orthomosaic路径下的NM_26June2018_Jimez2_c5r9_ortho.tif文件显示如下&#xff1a;
\\photography\\orthomosaic路径下的NM_26June2018_Jimez2_c5r9_ortho.tif文件显示如下&#xff1a;








 京公网安备 11010802041100号
京公网安备 11010802041100号