作者:手机用户2502925983 | 来源:互联网 | 2023-10-11 14:21
文章和代码下载地址:MOSSE:DavidS.Bolme,J.RossBeveridge,BruceA.Draper,YuiManLui.VisualObject
文章和代码下载地址:
MOSSE: David S. Bolme, J. Ross Beveridge, Bruce A. Draper, Yui Man Lui. "Visual Object Tracking using Adaptive Correlation Filters."
GitHub - xingqing45678/Mosse_CF(代码和文章都在里面)
看了网上很多文章,大都是说“两个信号越相似,其相关值越高。在跟踪,就是找到与跟踪目标响应最大的项。”然后将相关的公式摆出来,看得我一头雾水,可能是我自己的基础不太好吧,最后查了很多资料,总算感觉自己有点明白了,所以将其记录下来,如果有不对的地方请指正。
一、对2D相关的理解
首先,相关是相关,卷积是卷积,不要混为一谈!!!!
互相关是用来度量两个信号在某个时刻的相似程度,对于机器视觉领域来说就是指两个图像patch的互相匹配的程度。
1、相关操作
图像的相关公式: ,其中
,其中 称为相关核(Kernel),具体到每一个像素表示为:
称为相关核(Kernel),具体到每一个像素表示为:

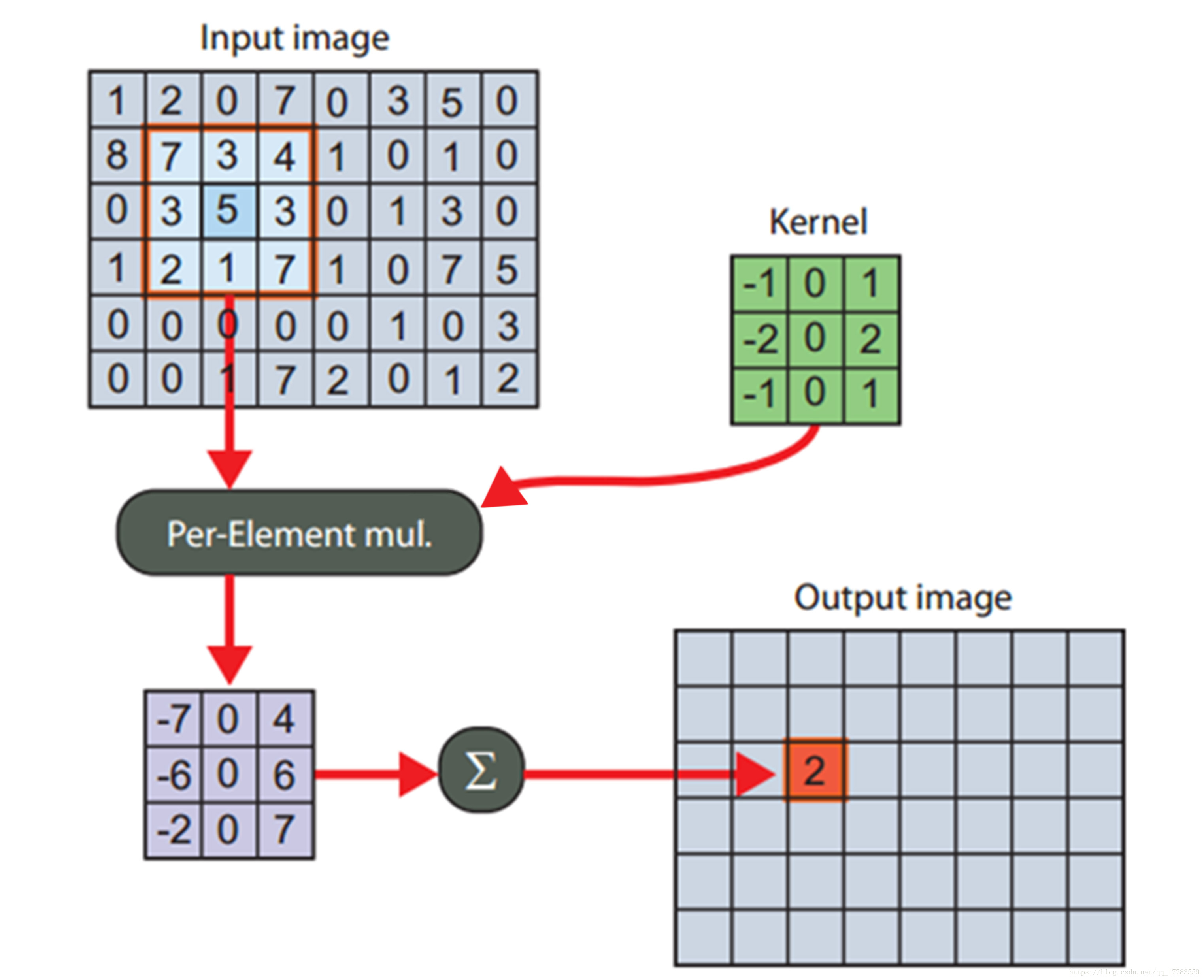
注:此图为网上转载 ,如图所示,Input Image为输入的图像。Kernel为相关核 ,也可以称作我们提前训练好的滤波器模板。Output image即为输出响应图像。
步骤:
(1)滑动核,使其中心位于输入图像的 像素上
像素上
(2)利用上式求和,得到输出图像的 像素值
像素值
(3) 充分上面操纵,直到求出输出图像的所有像素值
例:计算输出图像 像素值为
像素值为

2、卷积操作
图像的卷积公式: ,其中称为卷积核(Kernel),具体到每一个像素表示为:
,其中称为卷积核(Kernel),具体到每一个像素表示为:

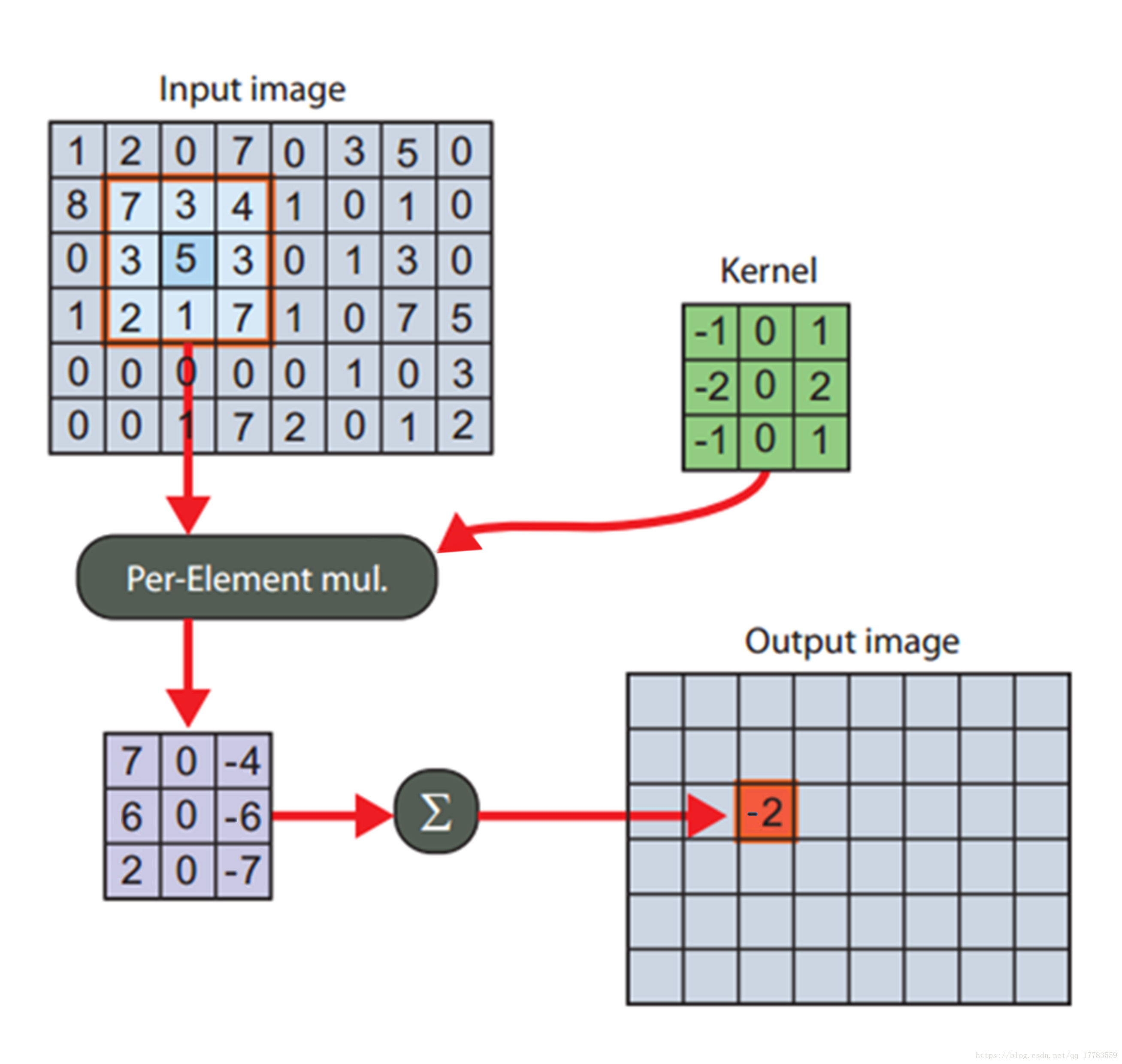
注:此图为网上转载(然后我p了一下) ,如图所示,Input Image为输入的图像。Kernel为相关核 ,也可以称作我们提前训练好的滤波器模板。Output image即为输出响应图像。
步骤:
(1)将卷积核围绕中心旋转180度
(2)滑动核,使其中心位于输入图像的像素上
(3)利用上式求和,得到输出图像的像素值
(4)充分上面操纵,直到求出输出图像的所有像素值
例:计算输出图像像素值为

3、差异:
(1)引用专业术语就是:Two-dimensional correlation is equivalent to two-dimensional convolution with the filter matrix rotated 180 degrees.
白话:卷积将核旋转了180度。
(2)物理意义:相关可以反应两个信号相似程度,卷积不可以。
(3)卷积满足交换律, ,相关不可以。
,相关不可以。
(4)卷积可以直接通过卷积定理(时域上的卷积等于频域上的乘积)来加速运算,相关不可以。
二、对相关滤波跟踪器的理解
相关滤波跟踪器就是通过互相关(cross-correlation)来定位目标当前帧所在位置的。响应图 最大值对应的位置即为当前时刻预测的目标位置,具体流程如下:
最大值对应的位置即为当前时刻预测的目标位置,具体流程如下:
如果我们在时域内求解响应图,运算量巨大,那么如何利用卷积定理将其转换到频域???
用卷积来表示相关就是:

利用卷积定理转换到频域为:

简写为:

其中, ,
, 表示点乘。所以将我们的输入图像和滤波器通过算法变换到频域后,直接将他们相乘,然后再变换回时域(也就是图像的空域)就可以得到响应图。
表示点乘。所以将我们的输入图像和滤波器通过算法变换到频域后,直接将他们相乘,然后再变换回时域(也就是图像的空域)就可以得到响应图。
几点重要的解释:
(1)输入的图像是指目标检测区域(MOSSE的检测区域就是目标所在区域),可能是像素值也可能是提取的特征(eg.Hog,CN,DeepFeatures等)。
(2)滤波器(或者叫目标模板)的大小和检测区域的大小一样。因为相同大小的矩阵在频率域才可以点乘计算。
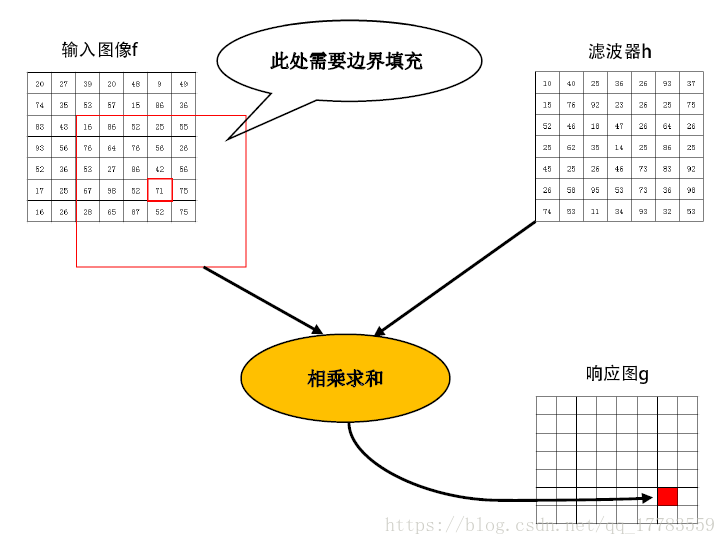
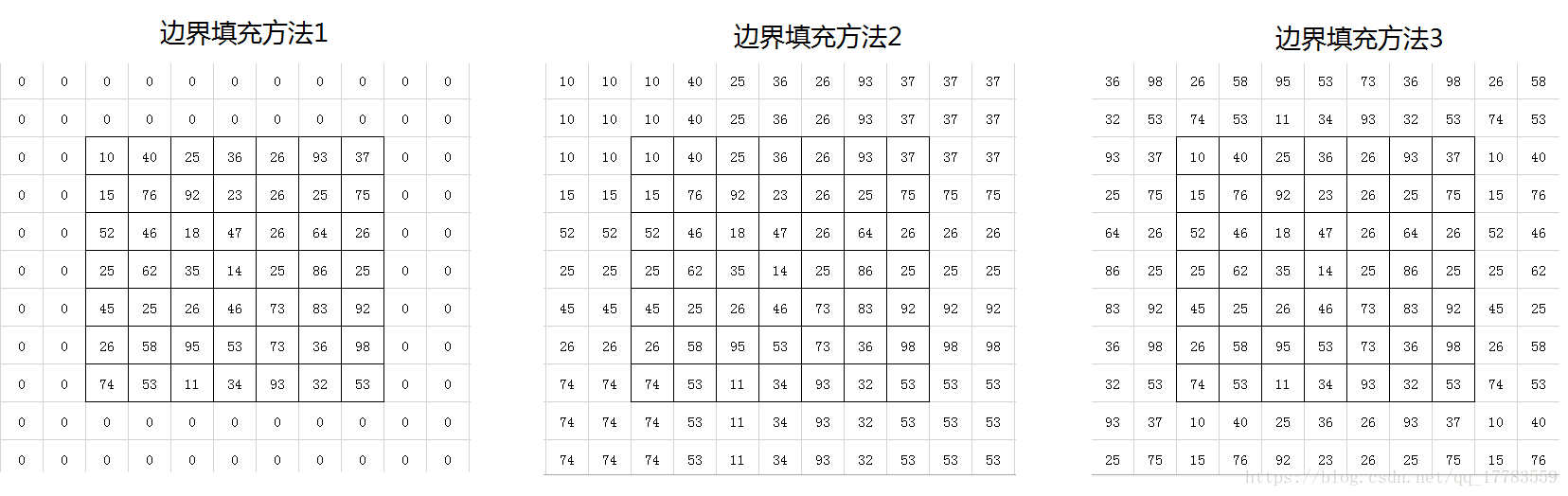
(3)当滤波器稍微偏移就会超出输入图像的范围,则需要填充数据(这就是卷积的边界效应)。然而在实际的相关滤波跟踪算法中,因为代码中直接就写频域的计算公式,所以我们不知道是如何填充边界的。常用的有三种填充方法,补零、补边界像素、循环图像,matlab中fft默认的是第三种。
三、对MOSSE的理解
经过上面的解释,应该都能明白相关滤波的检测原理,响应图峰值的位置即为当前帧目标的预测位置。为了得到响应图,那么我们求出滤波器模板频域的表示值即可:

1、预处理(不重要,一般都会进行这些操作)
(1)FFT卷积算法需要将图像和滤波器映射到拓扑结构上,边界采用循环图像的方式填充,即将图像的左边缘连接到右侧边缘,将顶部连接到底部。这就是上面所说的第三种填充方法。
(2)周期卷积会对输入数据进行周期填补,引入一些artifacts。作者通过如下如下论文中的方法减弱对输出响应的影响D. S. Bolme, B. A. Draper, and J. R. Beveridge. Average of synthetic exact filters. In CVPR, 2009. 2, 3。(具体细节可以不用深究)
(3)采用点乘余弦窗处理,使图像边缘慢慢变成零。
2、MOSSE滤波
提高算法的鲁棒性,作者对视频第一帧的跟踪窗口施加随机的仿射扰动,产生多组图像对滤波器进行初始化:

注意上式是元素点除,作者通过最小二乘法来求解:
求解过程我就不赘述了。经过一系列的推导,找到了Mosse滤波器的一个封闭解:
最后更新MOSSE滤波器如下:



原理解释还可以参考博客:相关滤波跟踪(MOSSE)_autocyz-CSDN博客_相关滤波
代码解释介绍参考博客:MOSSE 目标跟踪 解析_Fying2016的博客-CSDN博客_mosse目标跟踪




![Python3爬虫入门:pyspider的基本使用[python爬虫入门]](https://img1.php1.cn/3cdc5/324f/339/9d0ec9721f26646a.jpeg)

 京公网安备 11010802041100号
京公网安备 11010802041100号