首页
技术博客
PHP教程
数据库技术
前端开发
HTML5
Nginx
php论坛
新用户注册
|
会员登录
PHP教程
技术博客
编程问答
PNG素材
编程语言
前端技术
Android
PHP教程
HTML5教程
数据库
Linux技术
Nginx技术
PHP安全
WebSerer
职场攻略
JavaScript
开放平台
业界资讯
大话程序猿
登录
极速注册
取消
热门标签 | HotTags
数据挖掘
tensorflow
深度
人脸识别
神经网络
机器人
svm
人工智能
算法
图像识别
pytorch
ocr
nlp
机器学习
自动驾驶
自然语言处理
深度学习
当前位置:
开发笔记
>
人工智能
> 正文
思岚科技—SLAMTEC对于激光雷达的执着与坚持
作者:ZJ1314520俊 | 来源:互联网 | 2023-05-16 05:11
2013年,思岚科技对外发布了世面首款可单独销售的低成本激光雷达产品RPLIDARA1,也正是这款产品,让思岚科技被行业和市场认知和认可。思岚科技是一家致力于提供机器人自主定位导航解决方
2013年,思岚科技对外发布了世面首款可单独销售的低成本激光雷达产品RPLIDAR A1,也正是这款产品,让思岚科技被行业和市场认知和认可。
思岚科技是一家致力于提供机器人自主定位导航解决方案并致力于不断对其进行革新和普及的技术型公司,激光雷达作为自主定位导航技术的核心传感器,思岚从来没有停止或者是放缓对它的研发和改良。
自2014年RPLIDAR A1上线作为世界上首个独立销售的低成本激光雷达为开端。2016年提升了内部光学和算法系统发布了 RPLIDAR A2,首次将三角测距雷达性能做到突破10Hz、4000次每秒采样率,同时,结合思岚自主研发的光磁融合、无刷电机技术,大幅提升了激光雷达的使用寿命,长达5年。
并且首次将三角测距激光雷达应用到对于性能和可靠性有着更高要求的商用、工业应用领域。
2017年,发布的A2M6系列,这是第一款可以实现16米测量半径的三角测距激光雷达。在A2M6发布以前,行业内都认为采用三角测距法则的激光雷达受制于视觉系统的限制,难以突破10m以上的测量距离。为此,商用和工业场合的机器人中仍旧是TOF技术激光雷达的天下,因为他们所处场合无法被10米以内测距的雷达所驾驭。RPLIDAR A2M6的问世彻底改写了这个“局面”。 此外,还将原本4000次每秒的采样率提升到了8000次每秒。
思岚科技并不是只是为了去争这些所谓的行业第一,才要在这些指标上加以突破。激光雷达行业非常广阔,每个细分方向都可以大有所为。而致力于解决好机器人的自主定位导航能力,能突破的道路只有一条:以实用性和可靠性作为第一考虑,而这,才是RPLIDAR产品的主要理念。
作为主要用途是距离测量的激光雷达,其测量的最大距离(量程)自然是其最核心的指标。大部分激光雷达都会直接以测量距离作为其主要指标。不过除了测距范围外,相信你也了解下面这些指标数据:
较高的扫描频率可以确保安装激光雷达的机器人实现较快速度的运动,并且保证地图构建的质量。但要提高扫描频率并不只是简单的加速激光雷达内部扫描电机旋转这么简单,对应的需要提高测距采样率。否则当采样频率固定的情况下,更快的扫描速度只会降低角分辨率。
除了测距距离、扫描频率之外,测量分辨率和精度对于激光雷达性能来说同样重要,并且对于三角测距激光雷达而言,也更具有挑战。
由于测量原理的关系,虽然一般在10米以内都可以实现很高的测距分辨率,但其分辨率亦会随着探测物体距离增加而剧烈下降。
因此,为了实现更远距离的探测,就不只是增加激光器功率这么简单了,需要对于测距核心有本质的改良。同时为了可靠量产,也需要做很多的配套工作。
这些性能指标都是大家所知道的,自然也是思岚科技长久以来一直不断追求突破的。不过,思岚并不盲目的追求这些指标的提高,正像前面说的,思岚更加看重的是整体产品的实用和可靠性,更好的参数不一定能带来更好的产品,可能还会带来其他方面的缺失。就像采样频率,RPLIDAR A2在发布早期是使用4000次每秒采样率,虽然的确可以提升更多,但只有在得到了更多的验证后,才对外公布了8000次每秒的型号。
除了上述测距距离、采样率、精度等大家都熟知的性能指标外,在雷达实际使用中还有两个非常重要但往往不太被大家了解的性能指标:深色物体检出率和环境光抗干扰能力。
在实际工作中,很多应用环境中的物体大多不是白色墙面,而是深色的,如家具,暗色的墙纸。此时,激光雷达本身是否对于暗色物体有很好的检出效果就非常重要。一款号称有10多米的激光雷达,如果对于深色物体只有几米的检出率,那就容易导致机器定位和建图出现问题,对后期的定位导航工作也会产生很大的影响。
目前,激光雷达所标称的距离大多以90%反光率的漫反射物体(如白纸)作为测试基准。但实际上,对于黑色数据的有效检出也同样是一个重要的性能指标。
深色物体吸收了绝大部分的光能量,要让激光雷达对于深色物体具有和白色物体一样的检出能力是不现实的,对于以机器视觉为核心的三角测距远离雷达而言更是如此。
不过,正因为这个指标的重要性,思岚科技一直将提升对深色物体探测能力作为研发激光雷达的重点方向之一,对于RPLIDAR的全系列均如此,即使再难也力求突破。经过这几年来的多次迭代,目前,A2M6对于仅有10%以下反射率的黑色物体,也可实现10米的检测距离,这基本与目前TOF原理激光雷达一致。(可访问思岚官网了解更多激光雷达关于反射率的情况)
要知道,对于不同反射率物体的最大检出距离是RPLIDAR的一大检验指标,所有思岚出品的激光雷达,都将经受这道检验。目的只有一个,能让激光雷达在实际工作中也同样表现出色。
除了深色物体检出能力外,实际工作环境也会受到各类环境光照的影响。从落地窗投射进来的阳光、各类室内的人造光源甚至是直接暴露在室外工作,这些情况都有可能对于激光雷达产生干扰。
这对于采用三角测距法原理的激光雷达来说影响更加严重。因为需要能够区分出环境光和激光信号,就需要有更优异的处理算法和光学调校。传统受限于原理,三角测距法的激光雷达都会给大家一种完全无法抗击环境光照的印象,更不提在室外可以工作的可能性了。
不过,对于RPLIDAR而言并不是如此,环境光抗干扰能力从第一代RPLIDAR A1开始就是非常重视的指标。以至于对于A2M6系列来说,甚至已经可以完成一定的室外工作任务。
要很好的实现抗击光干扰对于三角测距激光雷达来说一直是一个很大的挑战。良好的抗环境光能力很大程度上也和前面提到的深色物体检出率很多时候也是矛盾的,除非对激光的安全性置之不理。
但这难不倒思岚,这里,我们展示一些相关的测试效果。实际上,对于环境光干扰抗击的能力是贯穿在我们RPLIDAR的生产环节的各类品质控制环节中的。
像是下图中,RPLIDAR不但在5米处毫无压力的检测出了阳光直射的墙面,同时也顺利的探测了环境周围其他物体。
在思岚,光干扰可靠性一直是激光雷达出品的很重要品质把控因素。在一定程度上,经过这几年的努力,RPLIDAR A2已经具有相对优异的环境光抗击能力,甚至在完全室外的环境下,也可以承担一系列工作。当然,思岚科技也深知目前这一切还有很多工作要做并将一直致力于其性能的提升。
其实,任何一款好产品都不仅仅是它所标识的核心参数那么简单。背后一定还存在着更多的逻辑,和相互之间的牵扯。虽然你未必熟悉过,但它们默默的守护着这款产品在实际工作中表现出色。技术细节有千千万万,但不变的都是思岚科技对于一款产品的执着。
机器人
写下你的评论吧 !
吐个槽吧,看都看了
会员登录
|
用户注册
推荐阅读
机器人
脑机接口技术在物联网行业中的应用与前景分析
近期,国际研究人员开发了一种轻便的脑电图(EEG)采集与信号处理系统,并在物联网领域进行了初步应用研究。该系统配备了8个可扩展的采集电极和1个参考电极,具备高灵敏度的放大功能,能够有效捕捉和处理脑电信号。通过与物联网技术的结合,该系统有望在智能家居、健康监测和人机交互等领域发挥重要作用,展现出广阔的应用前景。 ...
[详细]
蜡笔小新 2024-11-08 11:36:01
算法
HTML 页面中调用 JavaScript 函数生成随机数值并自动展示
在HTML页面中,通过调用JavaScript函数生成随机数值,并将其自动展示在页面上。具体实现包括构建HTML页面结构,定义JavaScript函数以生成随机数,以及在页面加载时自动调用该函数并将结果呈现给用户。 ...
[详细]
蜡笔小新 2024-11-06 12:20:41
机器人
如何正确安装Python:详细步骤与常见问题解答
本文详细介绍了如何正确安装Python,包括环境准备、下载与安装过程、路径配置等关键步骤,并针对初学者常见的安装问题提供了详细的解答和解决方案,帮助读者顺利搭建Python开发环境。 ...
[详细]
蜡笔小新 2024-11-03 11:47:48
算法
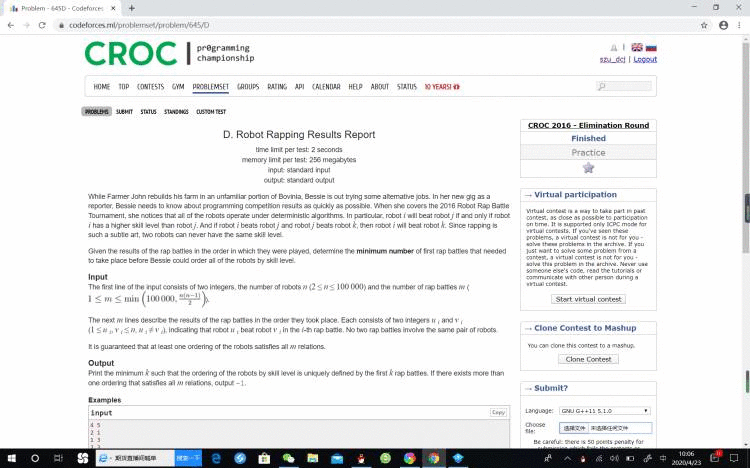
每日精选Codeforces训练题:1119E(贪心算法)、821C(栈模拟)和645D(拓扑排序)
题目涉及三种不同类型的算法问题:1119E(贪心算法)、821C(栈模拟)和645D(拓扑排序)。其中,1119E的问题背景是有n种不同长度的棍子,长度分别为2^0, 2^1, …, 2^(n-1),每种棍子的数量为a[i]。任务是计算可以组成的三角形数量。根据三角形的性质,任意两边之和必须大于第三边。该问题可以通过贪心算法高效解决,通过合理选择棍子组合来最大化三角形的数量。 ...
[详细]
蜡笔小新 2024-11-03 11:42:58
机器人
魏德米勒展会季大放异彩,独特展示技术魅力与品牌风采
魏德米勒展会季大放异彩,独特展示技术魅力与品牌风采 ...
[详细]
蜡笔小新 2024-11-03 11:10:09
人工智能
扎克伯格透露:一种新型类皮肤材料可能加速“元宇宙”愿景实现
Meta公司的人工智能团队与卡内基梅隆大学的科学家合作,开发出了一种厚度不足3毫米的可变形塑料材料,这种低成本的“皮肤”有望加速“元宇宙”愿景的实现。该材料具有高度的灵活性和响应性,能够模拟真实皮肤的触感,为虚拟现实和增强现实技术提供更加沉浸式的体验。 ...
[详细]
蜡笔小新 2024-11-01 05:58:50
机器人
如何巧妙运用米家智能设备实现高效联动与互联互通设置
如何巧妙运用米家智能设备实现高效联动与互联互通设置 ...
[详细]
蜡笔小新 2024-10-31 19:10:43
深度学习
全栈工程师在当今技术领域的角色与价值探析
当前,众多初创企业对全栈工程师的需求日益增长,但市场中却存在大量所谓的“伪全栈工程师”,尤其是那些仅掌握了Node.js技能的前端开发人员。本文旨在深入探讨全栈工程师在现代技术生态中的真实角色与价值,澄清对这一角色的误解,并强调真正的全栈工程师应具备全面的技术栈和综合解决问题的能力。 ...
[详细]
蜡笔小新 2024-10-31 10:28:12
机器人
从用户转型为开发者:一场思维升级的旅程 | 专访 StarRocks Committer 周威
从用户转变为开发者,不仅是一次角色的转换,更是一场深刻的思维升级之旅。本次专访中,StarRocks Committer 周威分享了他如何在这一过程中逐步提升技术能力与思维方式,为开源社区贡献自己的力量。 ...
[详细]
蜡笔小新 2024-10-31 09:21:44
算法
点云技术初探(三):PCL基础知识与学习路径指南
点云技术初探(三):PCL基础知识与学习路径指南本文首先介绍了点云库(PCL)的基本概念,PCL是一个在前人点云研究成果基础上发展而来的大型跨平台开源C++编程库,旨在为点云数据处理提供全面的支持。文章详细阐述了PCL的核心功能及其在三维数据处理、特征提取、分割与配准等方面的应用,并为初学者提供了系统的学习路径和资源推荐,帮助读者快速掌握PCL的使用方法。 ...
[详细]
蜡笔小新 2024-10-30 13:00:32
机器学习
全新发布的自我修复与自我更新的Linux版本,专为云计算环境设计!
全新发布的自我修复与自我更新的Linux版本,专为云计算环境设计! ...
[详细]
蜡笔小新 2024-10-30 10:53:23
机器人
蚂蚁安全天穹实验室在GeekPwn国际极客大赛中刷新历史纪录,荣登榜首
蚂蚁安全天穹实验室在GeekPwn国际极客大赛中刷新历史纪录,荣登榜首 ...
[详细]
蜡笔小新 2024-10-30 10:48:19
机器人
使用 QProcess 最小化启动外部程序并实现安川机器人的定时预约功能
通过使用 QProcess 实现外部程序的最小化启动,本文详细介绍了如何在安川机器人系统中实现定时预约功能。具体而言,该方法能够按照预设的顺序,自动启动并执行各个工装轴的登录程序。例如,在一个包含三个工装轴的场景中,系统将依次启动每个工装轴的登录程序,确保整个过程高效且有序。此外,文章还探讨了如何通过优化代码结构和参数配置,进一步提高系统的稳定性和可靠性。 ...
[详细]
蜡笔小新 2024-10-30 09:52:09
人工智能
台州今年在全省“机器换人”示范项目中位居榜首,入选数量领先全省
台州在今年全省“机器换人”示范项目评选中表现突出,位居榜首。据统计,全市共有19个项目成功入选全省百项示范项目,数量领先全省。其中,杰克和永高等企业在智能化改造方面取得了显著成效,进一步推动了台州向国际智能制造名城的目标迈进。 ...
[详细]
蜡笔小新 2024-10-29 18:38:23
算法
容联引领“金融科技50人”深度探讨,开启金融未来新篇章
8月16日,由容联主办,清华大学五道口金融学院和阿里达摩院共同支持的“科技助力金融50人论坛”在深圳成功举办。此次论坛作为通讯云中国行系列活动的重要组成部分,汇聚了行业精英,深入探讨了金融科技的最新趋势和发展机遇,旨在推动金融行业的创新与变革,开启金融未来的新篇章。容联创始人兼CEO在会上发表了重要演讲,分享了公司在金融科技领域的最新成果和未来展望。 ...
[详细]
蜡笔小新 2024-10-29 17:42:54
ZJ1314520俊
这个家伙很懒,什么也没留下!
Tags | 热门标签
数据挖掘
tensorflow
深度
人脸识别
神经网络
机器人
svm
人工智能
算法
图像识别
pytorch
ocr
nlp
机器学习
自动驾驶
自然语言处理
深度学习
RankList | 热门文章
1
apache怎么看日志
2
node.js 全局变量说明
3
华为路由交换由浅入深系列(七):理解华为交换机三种端口模式Access、Hybrid和Trunk对数据包Tag的处理过程
4
【操作系统】第二话·操作系统的前世今生
5
美团Android 岗3次挂了,这次终于成功拿下!
6
zabbix使用percona插件监控mysql
7
表单控件中怎样加 lt php,Element UI自定义表单组件怎么加入验证功能
8
nodejs对接七牛云的对象存储上传文件
9
14个值得推荐的个人提升方法
10
Android生成随机验证码技术
11
Dagger 2 系列(二) 基础篇:基本功能的实现
12
iOS自定义起始时间选择器视图
13
MySQL8的数据库,8.0.11驱动的逆向工程的坑的解决方法
14
mysql环形复制加HA_MySQL互为主从复制实现HA功能
15
iqooneo3 如何不用vivo账号下载外部应用_vivo新推黄金会员九折特权,快来看看你可以省多少?...
PHP1.CN | 中国最专业的PHP中文社区 |
DevBox开发工具箱
|
json解析格式化
|
PHP资讯
|
PHP教程
|
数据库技术
|
服务器技术
|
前端开发技术
|
PHP框架
|
开发工具
|
在线工具
Copyright © 1998 - 2020 PHP1.CN. All Rights Reserved |
京公网安备 11010802041100号
|
京ICP备19059560号-4
| PHP1.CN 第一PHP社区 版权所有







 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有