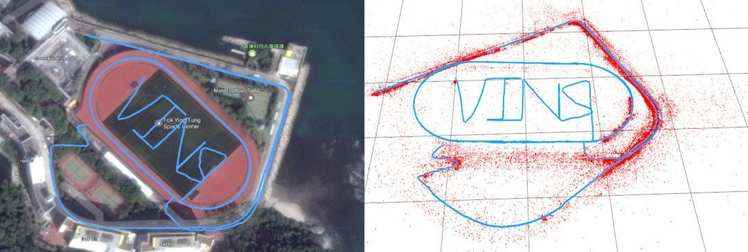
VINS-Fusion 基本介绍
VINS-Fusion 是继 VINS-Mono 和 VINS-Mobile(单目视觉惯导 SLAM 方案)后,香港科技大学沈劭劼老师开源的双目视觉惯导 SLAM 方案,VINS-Fusion 是一种基于优化的多传感器状态估计器,可实现自主应用(无人机,汽车和 AR / VR)的精确自定位。 VINS-Fusion 是 VINS-Mono 的扩展,支持多种视觉惯性传感器类型(单目摄像机+ IMU,双目摄像机+ IMU,甚至仅限双目摄像机)。开源项目组还展示了将 VINS 与 GPS 融合的模组示例。
特征如下:
- 多传感器支持(立体摄像机/单声道摄像机+ IMU /立体摄像机+ IMU)
- 在线空间校准(相机和 IMU 之间的转换)
- 在线时间校准(相机和 IMU 之间的时间偏移)
- 视觉循环闭合
现在让我们跟随以下简单的教程快速上手,建议搭配小觅双目摄像头标准版会更香!
VINS-Fusion 项目发布,小觅双目摄像头作为双目惯导相机被推荐zhuanlan.zhihu.com
VINS-Fusion 如何整合
在 MYNT® EYE 上运行 VINS-Fusion,请依照这些步骤:
- 下载 MYNT-EYE-S-SDK 及安装 mynt_eye_ros_wrapper。
- 按照一般步骤安装 VINS-Fusion 。
- 运行 mynt_eye_ros_wrapper 和 VINS-Fusion 。
快捷安装 ROS Kinetic (若已安装,请忽略)
cd ~
wget https://raw.githubusercontent.com/oroca/oroca-ros-pkg/master/ros_install.sh &&
chmod 755 ./ros_install.sh && bash ./ros_install.sh catkin_ws kinetic
安装 Ceres
cd ~
git clone https://ceres-solver.googlesource.com/ceres-solver
sudo apt-get -y install cmake libgoogle-glog-dev libatlas-base-dev libeigen3-dev libsuitesparse-dev
sudo add-apt-repository ppa:bzindovic/suitesparse-bugfix-1319687
sudo apt-get update && sudo apt-get install libsuitesparse-dev
mkdir ceres-bin
cd ceres-bin
cmake ../ceres-solver
make -j3
sudo make install
安装 MYNT-EYE-VINS-FUSION-Samples
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/slightech/MYNT-EYE-VINS-FUSION-Samples.git
cd ..
catkin_make
source ~/catkin_ws/devel/setup.bash
(如果安装失败,请尝试换一台系统干净的电脑或者重新安装系统与ROS)
在 MYNT® EYE 上运行 VINS-FUSION
1.运行 mynteye 节点
cd (local path of MYNT-EYE-S-SDK)
source ./wrappers/ros/devel/setup.bash
roslaunch mynt_eye_ros_wrapper vins_fusion.launch
2.打开另一个命令行运行 VINS
cd ~/catkin_ws
source ./devel/setup.bash
roslaunch vins mynteye-s-stereo.launch # Stereo fusion / Stereo+imu fusion
# roslaunch vins mynteye-s-mono-imu.launch # mono+imu fusion
# roslaunch vins mynteye-s2100-mono-imu.launch # mono+imu fusion with mynteye-s2100
# roslaunch vins mynteye-s2100-stereo.launch # Stereo fusion / Stereo+imu fusion with mynteye-s2100
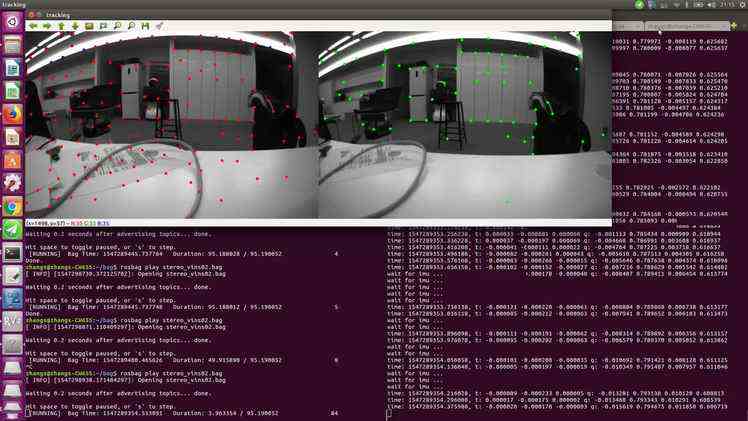
小觅双目摄像头标准版跑 VINS-Fusion 实测:
https://www.zhihu.com/video/1104393640977420288
Vins-Fusion 未来发展
VINS-Fusion 当前是 KITTI Visual Odometry 榜单中排名最靠前的开源双目 VO 方案,除了单双目,其还提供 IMU, GPS 等多传感器数据的融合,让位姿估计得更加精准。相信在越来越智能化的未来,其在无人机、无人驾驶、AR/VR、物流仓储等领域都能起到自定位的技术指引、筑好智能化的基石。
看到结尾了,难道不要点个赞嘛~
快买起来跑 VINS-Fusion !
https://xiaomishuma.tmall.com?BIZ=ECOMMERCExiaomishuma.tmall.com?BIZ=ECOMMERCE






![[译]技术公司十年经验的职场生涯回顾](https://img8.php1.cn/3cdc5/24912/711/b6574f3292f9dc00.png)



 京公网安备 11010802041100号
京公网安备 11010802041100号