目录
- 一、前言
- 二、视觉自动循迹的算法流程
- (1)图像的获取
- (2)图像的预处理
- (3)目标轨迹的提取
- (4)根据已知曲线进行预测控制
- 三、核心模块及要点
- 四、运行效果
- 五、总结
一、前言
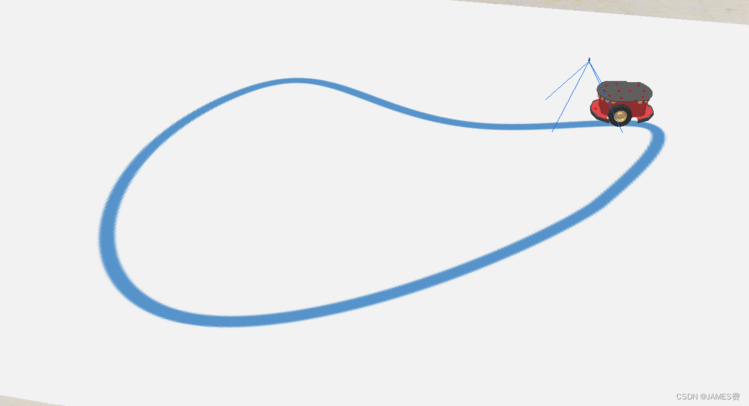
基于目前的研究演进,我们还是不能把python机器人编程——差速机器人小车的控制,控制模型、轨迹跟踪,轨迹规划、自动泊车(中)未完成部分给补上,本篇先把一些基础的问题给先解决。那就是非常常见的agv无人控制方式——循迹自动驾驶。本篇是利用单目视觉去实现简单的预定轨迹(这里指轨迹没有交叉、突变等情况),小车自动跟随驾驶。这个实现后,我们再接着开个中篇来处理复杂轨迹(比如,十字交叉、断线等)的自主决策和驾驶问题。等处理完了这个,再去研究没有轨迹引导时的一些小车自动形式实现方式,最终能够把之前埋得坑给填平。
二、视觉自动循迹的算法流程
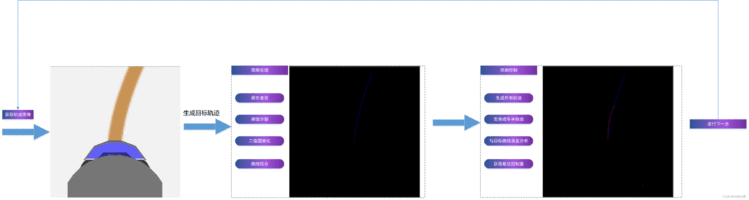
本次基于视觉实现的自动循迹行驶,主要流程如下图:
(1)图像的获取
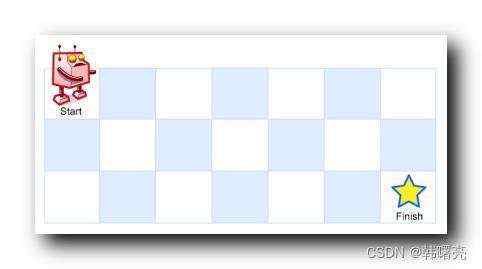
这里简化了摄像头的摆放位置,我们采用的是垂直地面的摄像头摆放,这样省略了摄像头的旋转变换,如下图:
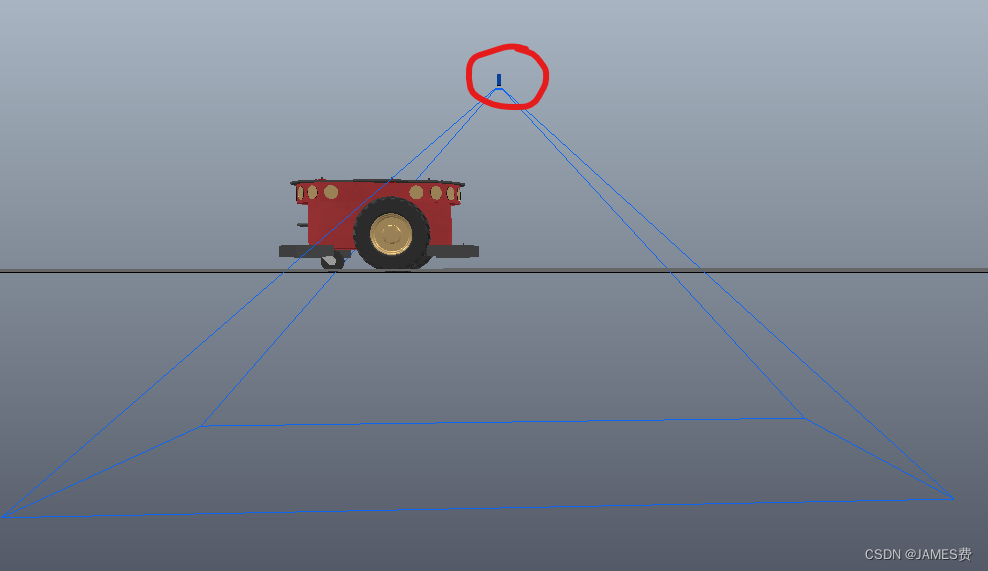
在实际小车的摄像头布置中,往往是斜向布置,需要先进行必要的坐标变换,我们这里简化了,摄像头与物理世界的位置关系如下图所示:
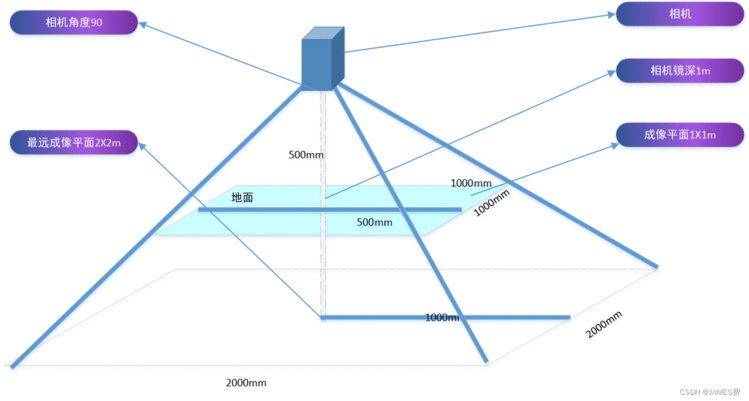
摄像头成像的图片尺寸分辨率为512X512像素,对应的现实物理平面尺寸为1X1米。
通过该摄像头,我们获取了小车的前半部分和车头前面的部分轨迹图像。
(2)图像的预处理
接下来,对图像进行必要的处理,处理流程如上图所示,可以通过颜色查找的方法过滤掉非轨迹的图像元素:
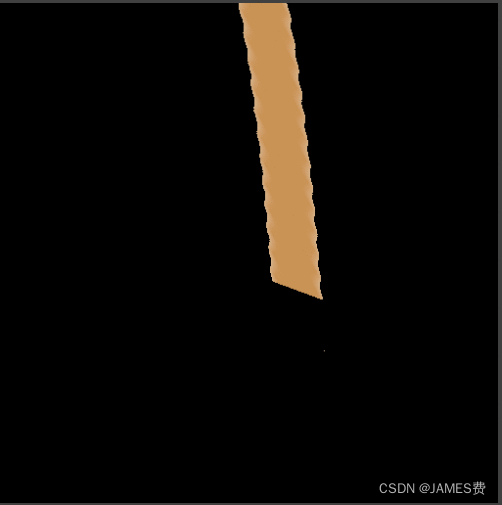
从而提取我们想要的目标轨迹,接着进行图像的二值化,然后获得了一个轨迹图像。
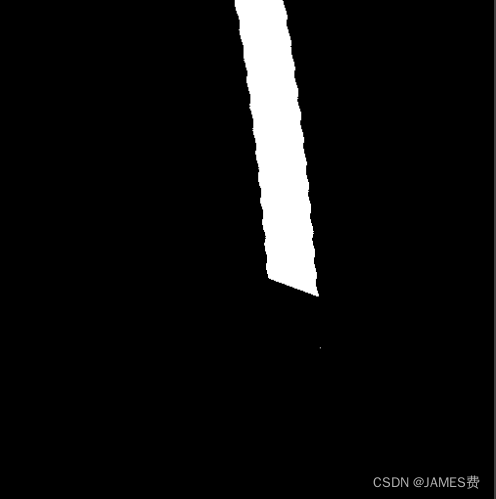
(3)目标轨迹的提取
这里得到的轨迹往往是比较宽的,需要将轨迹进行细化,可以用细化算法进行处理(细化算法下节描述),或者是通过自上而下,左右像素得扫描,对横向得像素进行归并(可以取平均值),获得一个只有一个像素宽度的细细的轨迹线,然后通过获取的轨迹线,变换到与我们预测轨迹同一坐标系下,用于后续得轨迹对照。
(4)根据已知曲线进行预测控制
得到一个曲线后,我们就可以利用预测控制的思想,通过改变小车的两轮的差速进行轨迹的预测,并与已知曲线进行比较,得到误差最小的一个轨迹,对应的轮速就是本次最优的一个控制量。这部分我们已经在之前的一篇博文里——
python机器人编程——差速机器人小车的控制,控制模型、轨迹跟踪,轨迹规划、自动泊车(中)详细进行了说明,这里不再赘述。
三、核心模块及要点
轨迹图像细化
除了应用预测控制思想,这里所涉及的一个核心的模块是对轨迹的细化处理。细化处理的原理网上有很多,读者自行了解。我们直接可以使用一个其它牛人的库就可以了,代码如下:
from skimage import morphology
def path_skeletonize(img):"""图像的细化Parameters----------img : TYPERGBReturns-------skeleton : TYPEBinary"""_,binary = cv2.threshold(img,200,255,cv2.THRESH_BINARY_INV)binary[binary==255] = 1skeletonimg = morphology.skeletonize(binary)skeleton = skeletonimg.astype(np.uint8)*255return skeleton
*注意:*用此算法有时候会出现毛刺现象,其鲁棒性不太好。后来经过多次试验,发现采用逐个像素扫描,同行归并得方式比较可靠:
for i in range(286,0,-1):u1=999u2=999temp=0count=0umax=Pathimg.shape[1]crossv=iif Pathimg[i][0]>=1 or Pathimg[i][umax-1]>=1:iscross=1 breakfor j in range(umax):if count==2: temp=temp/2aimPath[i]=tempbreakif Pathimg[i][umax-j-1]>=1 and u2==999:temp=temp+umax-j count=count+1u2=10000if Pathimg[i][j]>=1 and u1==999:temp=temp+j count=count+1u1=10000
小车轮距L的测量
如果是实物模型,我们只要用尺子量一下两个轮子的距离就可以了。仿真模型可以也可以通过计算获取,也可以通过一个轮子不动,只转另一个轮子,然后获取三个采样点,通过三个点计算旋转的半径,代码如下:
def solve_ccenterby_3P(p1,p2,p3):"""已知圆上三点坐标,求圆心和半径"""try:if len(p1)==2: x1=p1[0]y1=p1[1]x2=p2[0]y2=p2[1]x3=p3[0]y3=p3[1]A=x1*(y2-y3)-y1*(x2-x3)+x2*y3-x3*y2B=(x1**2+y1**2)*(y3-y2)+(x2**2+y2**2)*(y1-y3)+(x3**2+y3**2)*(y2-y1)C=(x1**2+y1**2)*(x2-x3)+(x2**2+y2**2)*(x3-x1)+(x3**2+y3**2)*(x1-x2)D=(x1**2+y1**2)*(x3*y2-x2*y3)+(x2**2+y2**2)*(x1*y3-x3*y1)+(x3**2+y3**2)*(x2*y1-x1*y2)cx=-B/A/2cy=-C/A/2r=math.sqrt((B**2+C**2-4*A*D)/(4*A*A)) return (cx,cy),relse:print("type erro or lenth must be 2 .ex:(x1,y1)")except Exception as e:print("erro",e)return None,None
预测轨迹变换
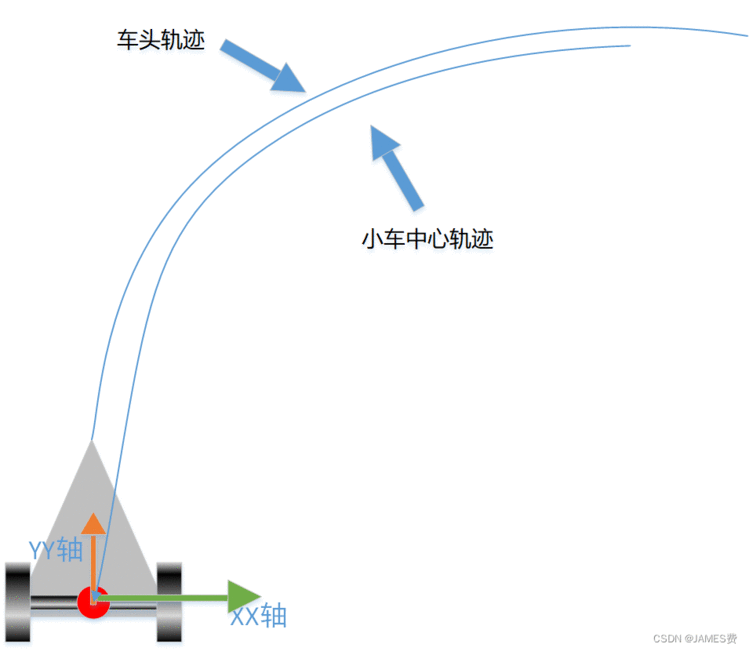
除此之外,在预测轨迹生成的时候,优于我们布置的摄像是布置在小车的前正上方的,小车中心到车头的那部分轨迹其实是看不到的,
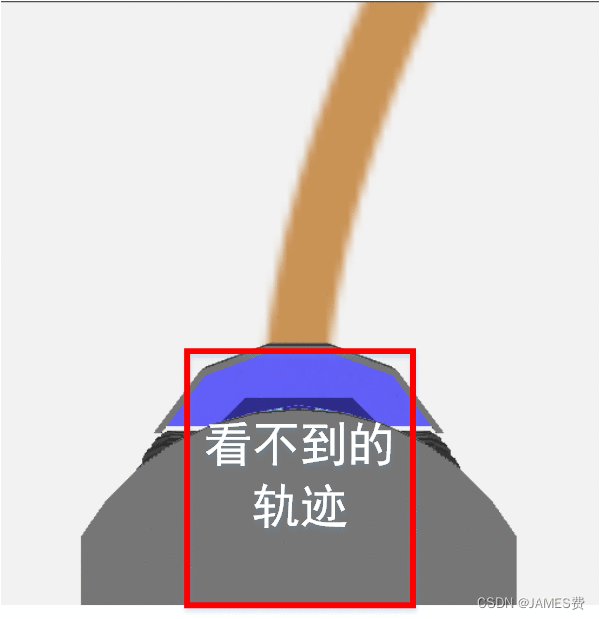
因此,我们获取的轨迹其实是车头之前的轨迹,我们之前那篇博文的轨迹是小车的中心出发的,因此我们需要根据车头与小车中心的物理关系,将预测的轨迹转化为车头的轨迹,然后才可以比较目标轨迹和预测轨迹的均方差(当然这可能不是最好的办法,读者知道更好的方法请留言告知)。
在已知小车中心和朝向角的情况下,可以通过旋转平移变换,求得车头的坐标,代码如下:
def Center2Head(xt, yt, theta,HeadL=0.2):"""已知中心点坐标(xt,yt),及转向角theta,求车头坐标车头O --------|| 车头距离中心:0.2M|----O----| --------小车中心"""T=np.array([[1,0,xt],[0,1,yt],[0,0,1]])Tangle=math.pi/2-thetaR=np.array([[math.cos(Tangle),math.sin(Tangle),0],[-math.sin(Tangle),math.cos(Tangle),0],[0,0,1]])HXY=np.array([[0],[HeadL],[1]])Hxy=np.dot(T, np.dot(R,HXY)) hx=Hxy[0][0]hy=Hxy[1][0] return hx, hy
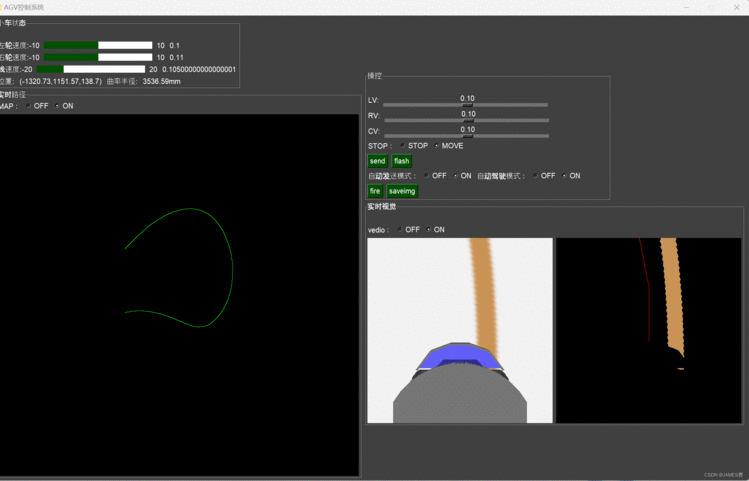
四、运行效果

以上的方法运行后,能够跟随轨迹进行自动调整方向,总体效果还行,需要对一些参数进行再细致的调整,如步长、预测的时间dt等,还有需要优化的地方。
五、总结
以上就是简单的轨迹自动跟随的python实现,目前的方法还不能应对轨迹交叉,急转弯、岔路等情况,需要再进一步进行研究完善,还有就是可能存在的一些灯光干扰等问题,有待进一步解决。
关于性能上的问题,由于python在计算的处理速度上面相比与c++等语言会慢些,尤其是像本篇涉及的一些图像处理,预测的轨迹运算等任务,实际情况,如果都放在一个线程上面,实时性会比较差,因此需要进行一些优化处理,可以将状态的获取,图像的处理,轨迹寻优这几个运算分别开一个线程进行计算,或者利用一些加速库进行加速,这样对于现实系统应用会有很大的帮助。笔者也将继续对本篇的程序进行优化。等优化完后,上传到CSDN资源池中。
注:本篇纯属个人不成熟解决方案,存在多处不足,仅供参考。



 京公网安备 11010802041100号
京公网安备 11010802041100号