论文地址
基于深度卷积神经网络的遥感影像车辆检测
本文基于超像素分割算法实现对车辆检测窗口的定位。车辆检测窗口的识别是基于深度卷积神经网络实现的。通过数据扩充将带标记的样本应用于深度卷积神经网络进行特征和分类器参数的学习。训练完成的深度卷积神经网络将识别所有的车辆检测窗口,结合非极大值抑制对识别结果做过滤得到最终的车辆检测结果。
本文提出一种先在遥感图像中提取道路感兴趣区域再在这个道路感兴趣区域上执行车辆检测识别算法。道路感兴趣区域的提取操作能减少后续算法需要处理的区域的总体面积,同时该步骤能减小非道路上的虚警,从而使基于深度卷积神经网络的遥感图像的车辆检测得检测结果的精度进一步提升。提取完道路感兴趣区域后,本文再将问题集中在道路感兴趣区域上, 通过使用超像素分割算法将遥感图像进行图像分割。在分割的结果上进一步提取候选的待检测窗口以替代完全的滑动窗口技术。通过这个过程能够减少总的需要检测的窗口数量,因此同样能够加速车辆检测的过程,而且与完全的滑动窗口对比只有少部分的性能损耗。在待检测窗口上用卷积神经网络识别该窗口是否包含车辆目标,对其输出的结果再使用非极大值抑制对检测识别结果进行过滤从而得到最终的遥感图像车辆检测结果。在本文的后续部分会阐述车辆检测的国内外研究现状以及常用的车辆检测方法。
先解释一波传统的车辆检测方法,再解释深度学习方法
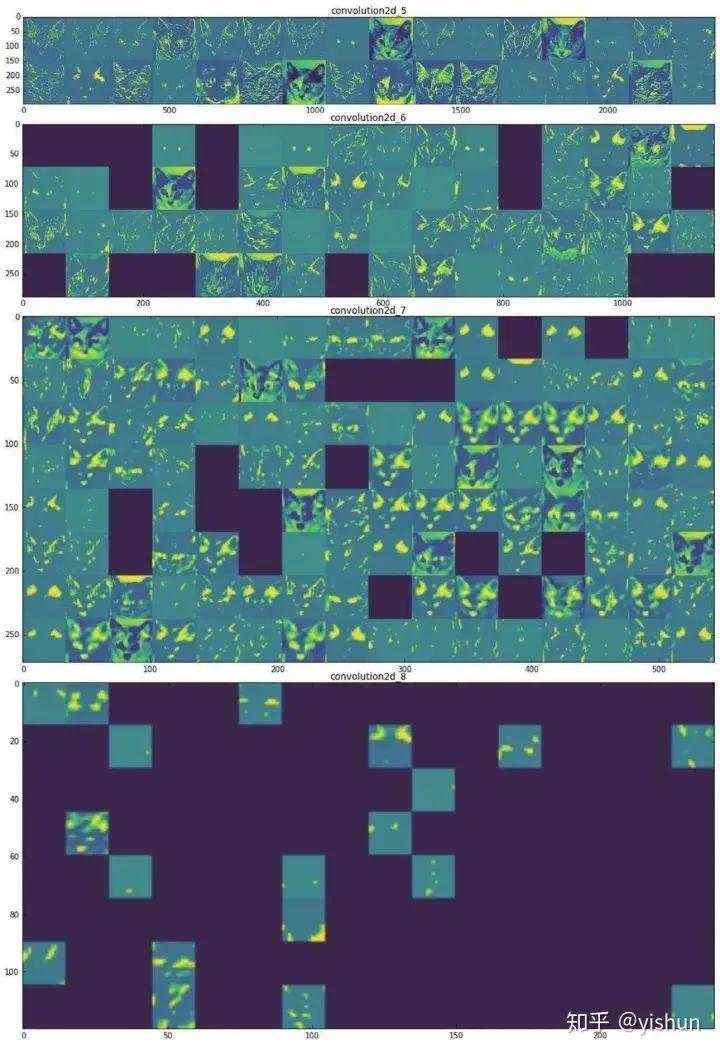
这个关于卷积神经网络的图像识别过程解释的还是挺好的
通过组合简单但是具有非线性的模块来把低层级的特征表示转化成高一级的特征表示。最底层就是原始数据,每一层都比前一层更抽象。举个例子,比如一张图片,可以从像素的矩阵中得到第一层特征表示, 比如表示一个特定方向和位置是否存在边缘。 第二层的特征表示可以从这些边缘的信息中抽取到特定的图案, 同时还能容忍小部分边缘的变形。第三层的特征表示可以把这些图案组合成一个更大的实体,比如一个确定的物品的一部分。下一层的特征表示组合这些部件进而识别出物体。
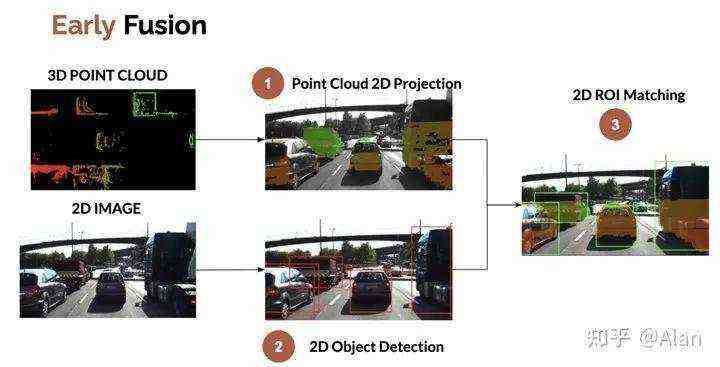
基于 SVM 的道路检测算法

超像素分割算法:
基于图论的分割方法是一种类型的超像素分割算法,基于梯度下降的是另外一种类型的超像素分割方法

道路特征的提取:
纹理特征特征提取(LBP)
每一个像素周边的8个像素点,这8个像素点的值如果大于该中心像素点,则取1,如果小于该中心像素点,就取0,转化成十进制,这样得到了该像素的一个0-256之间的响应图。


D是掩膜处理,这样对于车辆提取就更加准确了,宁愿多一些虚警,也不要少一些车辆信息。B是svm出来的结果,c是霍夫曼边缘线提取的结果。
基于深度卷积神经网络的车辆检测

在做车辆检测之前需要把深度卷积神经网络先训练好, 通过在数据集中的图片使用超像素分割后获得超像素块, 从这些超像素块中获得所需要的正负样本,使用这些正负样本训练深度卷积神经网络。在车辆检测识别阶段,当一张新的遥感图像需要被处理的时候, 先使用上一章用到的遥感图像道路提取算法提出道路感兴趣区域; 接着使用超像素分割算法将其分割成多个超像素块,每个超像素块会根据其质心位置提取出各自对应的待检测窗口,这个待检测窗口经过前面训练好的深度卷积神经网络做检测识别,得到属于是车辆的检测窗口; 最终通过使用非极大值抑制的方法过滤掉多余的检测窗口,从而得到最终的遥感图像车辆检测识别结果。
6层卷积结构

50层残差训练结构







 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有