作者:李小白无悔 | 来源:互联网 | 2024-12-16 16:08
步进电机的工作原理
步进电机是一种能将电脉冲信号转换为机械角位移的机电装置。电脉冲类似于心跳中的脉搏,当检测到脉搏时,对应于电脉冲的高电平状态;无脉搏时,则对应低电平状态。角位移的单位通常是弧度。
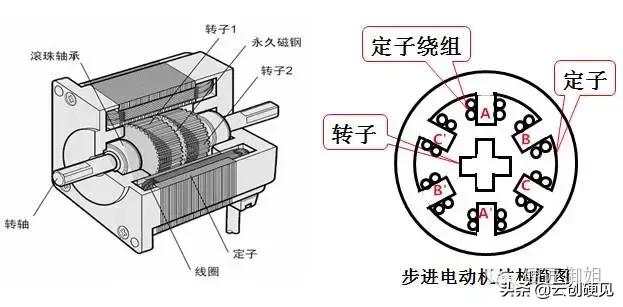
步进电机主要有反应式、永磁式和混合式三种类型,每种类型都有其独特的优势。反应式步进电机步距角小且精度高;永磁式步进电机具有较大的力矩;混合式步进电机结合了高精度和大力矩的优点,但成本相对较高。接下来,我们将以反应式步进电机为例,详细介绍其结构和工作原理。步进电机主要由定子和转子两部分组成:
在三相步进电机中,定子和转子分别有六个和四个磁极。如图所示,A与A'组成一相;B与B'为另一相;C与C'为第三相。步进电机接收到一个电脉冲信号后,会转动一个固定的步距角。例如,当A相通电时,A方向的磁通通过转子形成闭合回路,使转子的齿与定子的齿对齐。随后,B相通电,转子继续转动,直到B方向的齿与BB'对齐。最后,C相通电,完成一个完整的步进循环。这种驱动方式称为三相三拍驱动。
因此,步进电机通过接收一定数量的脉冲来实现精确的转动。每输入一个电脉冲,电机转动一个固定的角度,其角位移与输入脉冲数成正比,转速与脉冲频率成正比。通过改变绕组的通电顺序,可以控制电机的正反转。例如,按照A、B、C的顺序通电,电机正转;而按照C、B、A的顺序通电,则电机反转。
实现方法:
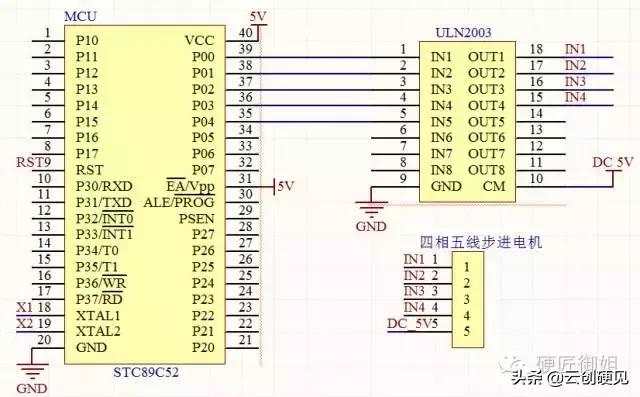
步进电机需要较大的电流来驱动,而单片机的输出口通常无法提供足够的电流。因此,通常需要使用步进电机驱动控制器来放大电流。例如,使用ULN2003驱动器可以有效地控制四相五线制步进电机。在这种配置中,单片机通过控制驱动器来间接控制步进电机。本例中使用的步进电机型号为24BYJ-48,驱动电压为5V,采用四相四拍的驱动方式。
基本电路原理图如下:
以上所有信息仅供学习交流使用,不作为任何学习或商业标准。如果您对文中的任何信息有疑问,欢迎随时提出,感谢您的支持!
关于云创硬见
云创硬见是中国领先的电子工程师社区,提供行业资讯、社群互动、培训学习、活动交流、设计与制造分包等服务。平台以开放式硬件创新技术交流和培训为核心,连接了超过30万名工程师和产业链上下游企业,致力于为百万工程师和创新创业型企业打造一站式公共设计与制造服务平台。













 京公网安备 11010802041100号
京公网安备 11010802041100号