目前自动驾驶中激光雷达应用还有很多瓶颈,毫米波雷达在自动驾驶中目前依然无可替代,既然如此就必须好好理解毫米波雷达的原理,因为要想利用好这些传感器,第一步就是理解,知己知彼百战不殆,当下毛衣战升级,汽车销量严重下滑,可谓殷鉴不远,必须常备不懈。
1. 毫米波雷达是什么
通常将波长为1~10毫米的电磁波称毫米波,车载毫米波雷达工作的频段为24GHz和77GHz,少数国家(如日本)采用60GHz频段。车载毫米波雷达通过天线向外发射毫米波,接收目标反射信号,经后方处理后快速准确地获取汽车车身周围的物理环境信息,然后根据所探知的物体信息进行目标追踪和识别分类,进而结合车身动态信息进行数据融合,最终通过(ECU)进行智能处理。
电磁波有几种特性,当电磁波遇到不同介质时会发生反射、吸收、透射、衍射等现象,毫米波主要是利用电磁波的反射,通过发送和接收电磁波的时间计算反射物体的位置,波长越长,越容易发生透射和衍射现象,而波长越短,则很容易被反射。目前主要是24HZ,未来会采用77HZ和79HZ的,频率越高,波长越短,反射性越好,分辨率越高。
2. 车载毫米波雷达工作体制
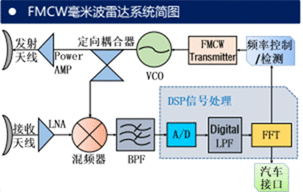
根据辐射电磁波方式不同,毫米波雷达主要有脉冲体制以及连续波体制两种工作体制。其中连续波又可以分为FSK(频移键控)、PSK(相移键控)、CW(恒频连续波)、FMCW(调频连续波)等方式。FWCW雷达是最常用的车载毫米波雷达。能同时测出多个目标的距离和速度信息,可对目标连续跟踪,系统敏感性高,错误报警率低;不易受外界电磁噪声的干扰;测量距离远,分辨率高;所需发射功率低;成本较低;信号处理难易程度及实时性可达到系统要求。

FMCW雷达系统主要包括收发天线、射频前端、调制信号源和信号处理模块等。
把毫米波雷达安装在汽车上,可以测量从雷达到被测物体之间的距离、角度和相对速度等。毫米波雷达目前主要应用于中高端车型,随着大众对汽车主动安全性能的认可度增加,ADAS相关产品将逐渐向低端车型普及。
3. 毫米波雷达的检测、测距、测速和角度测量
毫米波和大多数微波雷达一样,有波束的概念,也就是发射出去的电磁波是一个锥状的波束,而不像激光是一条线。这是因为这个波段的天线,主要以电磁辐射,而不是光粒子发射为主要方法。优点,可靠,因为反射面大,缺点,就是分辨力不高。
电磁波在空气中传播时间3*10^8m/s;判断有没有目标很简单,判断回波有没有就行了。测距也简单,都是基于TOF原理,但是我们说电磁波的传播速度是光速,所以这个带来了一定的挑战。刚才我们说毫米波雷达作用距离都不太远,比如我们说汽车或者无人机,那么探测距离就很近,回波和发射波间隔就非常短,所以一般并不太适合使用简单的发射脉冲方式,所以现在主要是用FMCW方式较多。
毫米波雷达测速和普通雷达一样,有两种方式,一个基于dopler原理,就是当发射的电磁波和被探测目标有相对移动、回波的频率会和发射波的频率不同。通过检测这个频率差可以测得目标相对于雷达的移动速度。但是这种方法无法探测切向速度,第二种方法就是通过跟踪位置,进行微分得到速度。
毫米波雷达的侧向,雷达对目标方位的探测主要基于一种方法,就是使用较窄的波束。因为当目标出现在波束里,我们一般没有办法判断目标具体在这个波束内部的那个方向,所以我们必须把波束做窄,当然能和激光一样最好,但是这个很难。那么把波束做窄,有几种方法,一种使用有向天线,比如喇叭天线或者透镜天线。还有一种方法,就是使用多根天线+阵列信号处理的方法。对于毫米波来讲,由于波长很短,所以我们做很多根天线的代价就很小(这个代价指价格、尺寸),所以毫米波雷达大量使用阵列天线的方式来构成窄波束,能多窄呢?比如3度,5度这样,是汽车常用的。当然这个和激光还不能比,但是已经很好了。






 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有 