作者:骆树真次_902 | 来源:互联网 | 2023-06-12 17:46
无人驾驶汽车
无人驾驶汽车,又称自动驾驶汽车或轮式移动机器人,是一种运输动力的无人地面载具。我们理想的无人驾驶汽车是无需人类操作即能从地点A行驶到地点B,不管途中环境多复杂天气多恶劣都由机器自己完成。无人驾驶汽车的核心在于无人驾驶技术,如果说汽车工业是制造业的皇冠,那么无人驾驶技术就是皇冠上的明珠。
无人驾驶汽车需要多门技术整合才能实现,它并非是一项单一的新技术,其中包括雷达、激光雷达、摄像头、GPS、计算机视觉、决策系统、操作系统、高精地图、实时定位、机械控制、能耗散热管理等等。尽管无人驾驶汽车看起来很科幻,但实际上梦想正在照进现实。

V2X与环境交互
V2X通信传感是无人车与周围环境的通信协议,包括车与车通信(Vehicle to Vehicle,V2V)、车与基础设施通信(Vehicle to Infrastructure,V2I)、车与行人通信(Vehicle to Pedestrian,V2P)。
V2V通信指无人驾驶汽车之间进行信息交换,比如无人驾驶车之间交换交通状况。V2I通信指无人驾驶汽车与基础设施之间进行信息交换,比如智能停车场与无人驾驶汽车的通信。V2P通信指无人驾驶汽车与行人之间进行信息交换,比如通过智能手机应用与无人驾驶汽车通信。
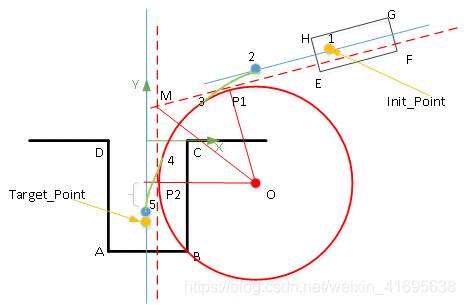
路径规划
路径规划主要解决的问题是找到一条最快最安全的从起点到终点的路径,路径规划中有很多成熟的算法,比如Dijkstra算法、A*算法、RRT算法等等。无人驾驶汽车的路径规划需要考虑多因素的影响,比如车祸路道、交通拥堵等。

总结
无人驾驶汽车的核心是感知能力,无人车有四种不同视野的眼睛,包括无线雷达、激光雷达、超声波雷达和摄像头,通过它们能得到不同的视野。在定位方面无人驾驶汽车使用GPS与惯性策略装置,再加上高精电子地图就能够实现非常精准的定位。此外,为了能让无人车与环境进行通信交互,V2X被提出来,包括V2V、V2I、V2P。







 京公网安备 11010802041100号
京公网安备 11010802041100号