作者: | 来源:互联网 | 2023-09-01 15:50
最新版本的 Autoware,因为新版本不带雷达和相机的标定工具,我安装的是 1.10.
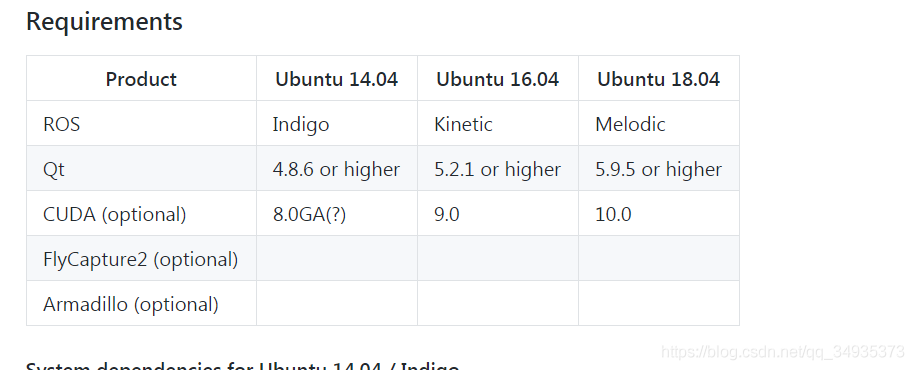
依赖项:
需要Qt ROS CUDA可选。我这里本身是kinect ros,所以只需要安装qt。
安装qt5.12.
从Qt官网找到要下载的包linux-x64
链接:https://download.qt.io/official_releases/qt/5.12/5.12.9/.
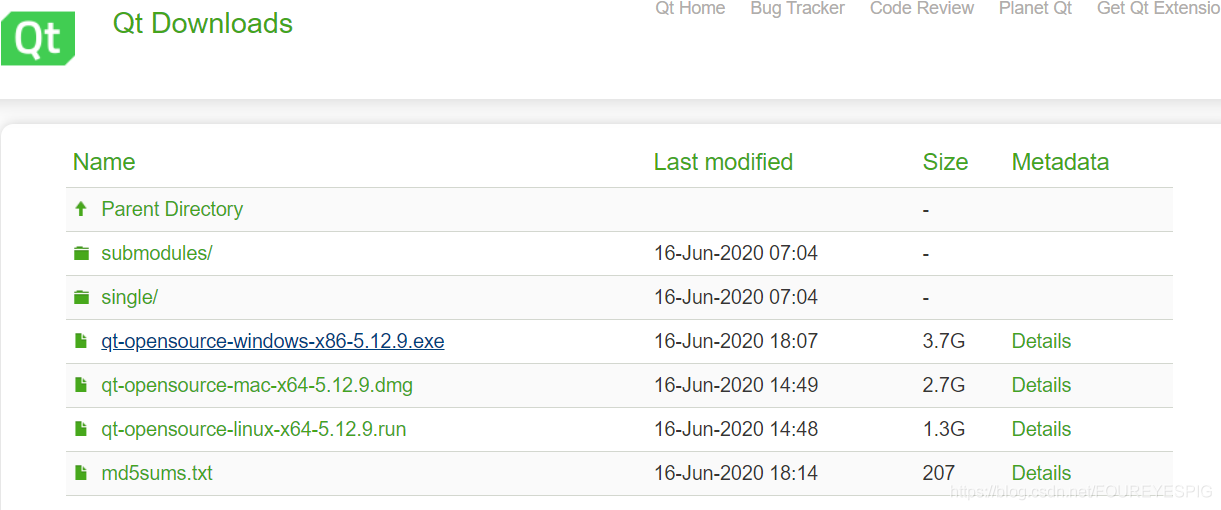
根据自己的系统选择对应的包。
cd /home/user/Downloads
进入到下载目录里。
/user是自己的用户名,我下载到了我的个人目录里面。
找到刚才下载的文件,给它执行的权限并运行。
chmod +x qt-opensource-linux-x64-5.12.9.run./qt-opensource-linux-x64-5.12.9.run
然后就会弹出安装向导,跟着步骤走就可以了。
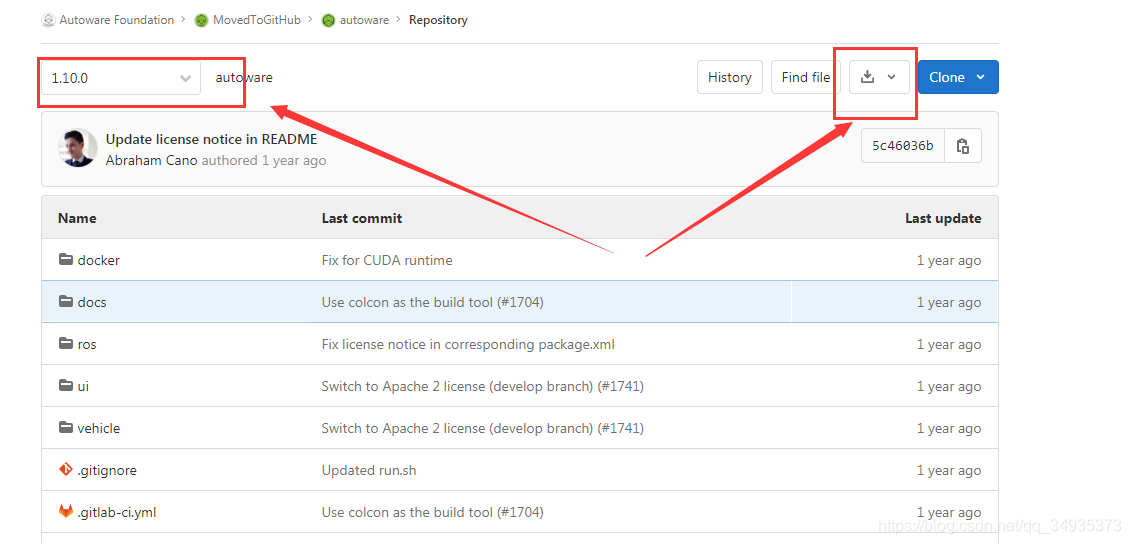
编译安装Autoware
打开网址:https://gitlab.com/autowarefoundation/autoware.ai/autoware/-/blob/1.10.0/README.md
用下载的方式下载下来,clone的话,好像文件不一样。
# 1. 进入 autoware 的 ros 目录下
cd autoware-1.10.0/ros# 2. rosdep 安装依赖
rosdep update
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO# 3. 编译
./catkin_make_release
在第3步编译的过程中,如果电脑配置可以应该可以跑的过,我这边报了个小错。
virtual memory exhausted无法分配内存还有个c++什么错误,反正就是内存的锅。
解决方法:
su #进入root用户模式
dd if=/dev/zero of=/var/swap bs=2048 count=2048000 #创建一个大小为2G的文件/var/swap
chmod 0600 /var/swap #修改权限
mkswap /var/swap #设置为swap
swapon /var/swap #打开#如果打开失败
#先关闭再打开
swapoff /var/swap
swapon /var/swap
编译完成
# 1. 进入 autoware 的 ros 目录下
cd autoware-1.10.0/ros# 2. source 环境,zsh 或 bash
source devel/setup.zsh[.bash]# 3. 启动主界面
./run
会要求输入root密码,然后会打开两个终端和一起界面。安装编译就算完成了。





 京公网安备 11010802041100号
京公网安备 11010802041100号