
Day 2

人工智能必需的线性代数,微积分部分基础公式整理
令V表示Rn的一个子集,如果V在向量加和运算以及标量乘积运算下是封闭的 那么称V为Rn的子空间
也即,如果a和b是V中的向量,那么a+b或者∂a(∂为任意标量)也为V中的向量
假定a1, a2, a3, ......, ak为Rn中的任意向量,他们所有线性组合的集合成为(a1, a2, a3, ......, ak)的生成子空间
记做:span[a1, a2, a3, ......, ak] = {∑i=1~k ∂iai: a1, a2, a3, ......, ak ∈ R}
对于向量a,生成子空间span(a1, a2, a3, ......, ak)由向量∂a组成,∂为任意实数(∂ ∈ R)同理,若a可以表示为a1, a2, ......, ak的线性组合,则有:
span[a1, a2, ......, ak, a] = span[a1, a2, ......, ak]
给定子空间V,如果存在线性无关的向量集合{a1, a2, ......, ak} ⊂ V 使得V= span[a1, a2, ......, ak]那么称{a1, a2, ......, ak}是子空间V的一组基 子空间中所有基都有相同数量的向量,这一适量成为V的维数,记做dim V.
m * n维的矩阵A = [a11, a12, ......, a1n]
[a21, a22, ......, a2n]
[:, :, ........., :]
[am1, am2, ......, amn]
A的第K列 ak = [a1k, a2k, ......, amk]T
矩阵A中线性无关列的最大数目称为矩阵A的秩,rank A
*rank A为span[a1, a2, ......, an]的维数
矩阵A的行数等于列数,则称该矩阵为方阵,行列式为与每一个方阵A相对应的一个标量. 记为det A或者|A|
行列式性质:1.矩阵A = [a1, a2, ......, an]的行列式为各列的线性函数,即,对任意的∂,ß ∈ R 和ak(1), ak(2) ∈ Rn 都有:
det[a1, ..., ak-1, ∂ak(1) + ßak(2), ak+1, ... an] = ∂det[a1, ..., ak-1, ak(1), ak+1, ... an] + ßdet[a1, ..., ak-1, ak(2), ak+1, ... an]
对于某个k,有ak = ak+1那么有,det[a1, ..., ak-1, ak+1, ... an] = det[a1, ..., ak, ak, ... an] = 0
若令In = [e1, e2, ......, en] = [1, 0, ......, 0]
[0, 1, ......., 0]
[..................]
[0, 0, ......, 1]
则有det In = 1
给定m*n阶矩阵A&#xff0c; 其P阶子式为一个p*p矩阵的行列式&#xff0c;该p*p矩阵由矩阵A去掉m-p行&#xff0c;去掉n-p列获得。其中p<&#61;min{m, n}, [min{m,n}表示m和n中娇小的那个数]
若矩阵A具有r阶子式&#xff5c;M&#xff5c;&#xff0c;具备以下性质&#xff1a;
&#xff5c;M&#xff5c;!&#61; 0
从A中再抽取一行和一列增加到M中&#xff0c;由此得到的新子式为0&#xff0c;有rank A &#61; r; 因此&#xff0c;矩阵A的秩等于他的非零子式最高阶数.
*一个非奇异(可逆)矩阵是一个行列式非0的方阵&#xff0c;假定A为m*n方阵&#xff0c;A为非奇异的&#xff0c;当且仅当存在m*n的方阵B&#xff0c;使得&#xff1a;
AB &#61; BA &#61; In &#61;&#61;&#61;&#61;> B &#61; 1/A(逆矩阵)
*欧式内积&#xff1a;x, y ∈ Rn, &#61; ∑i&#61;1~n xiyi &#61; x^Ty (此处^T为矩阵转置)
向量x的欧式范数(第二范数)||x|| &#61; (x, x)^1/2 &#61; (x^Tx)^1/2
*柯西施瓦茨不等式&#xff1a;
对于Rn中任意两个向量x, y&#xff1b;|(x,y)| <&#61; ||x|| ||y||
柯西-施瓦茨不等式证明&#xff1a;
[证明]:先假定x, y为单位向量&#xff0c;即||x|| &#61; ||y|| &#61; 1
有0 <&#61; ||x-y||^2 &#61; &#61; (x-y)(x-y)^T
&#61; ||x||^2 - 2 &#43; ||y||^2
&#61; 2 - 2
0 <&#61; 2 - 2 &#61;&#61;&#61;&#61;> <&#61; 1 当且仅当x&#61;y是等式成立.
*线性变换(定义)
给定函数L: Rn -> Rm 若&#xff1a;
1. 对于任意x ∈ Rn, a ∈ R,都有L(ax) &#61; aL(x);
2. 对任意的x, y ∈ Rn&#xff0c;都有L(x&#43;y) &#61; L(x) &#43; L(y);
则称函数L为一个线性变换
*特征值和特征向量
A: n*n阶实数方阵&#xff0c;存在标量 λ(可能为复数)和非零向量V满足等式AV &#61; λV&#xff0c;λ称为A的特征值&#xff0c;V称为A的特征向量
λ为A的特征值的充要条件&#xff1a;矩阵λI - A是奇异的&#xff0c;即det[λI - A] &#61; 0&#xff0c; I为n*n阶单位矩阵&#xff0c;即有n次方程成立
det[λI - A] &#61; λ^n &#43; an-1λ^n-1 &#43; ...... a1λ &#43; a0 &#61; 0
多项式det[λI - A]称为矩阵A的特征多项式&#xff0c;而上面的方程称为特征方程(特征方程存在n个根&#xff0c;即为A的n个特征值&#xff0c;若A有n个相异的特征值&#xff0c;那么他也有n个线性无关的特征向量)
*矩阵范数
矩阵集合Rm*n可视为实数向量空间Rmn&#xff0c;故矩阵向量范数向量同等于正则向量范数表记矩阵A的范数为||A||&#xff0c;满足如下条件的任意函数||.||
若A !&#61; 0&#xff0c;则有||A|| > 0, ||0|| &#61; 0, 0为零矩阵
对任意C ∈ R&#xff0c;有||CA|| &#61; |C| ||A||
||A &#43; B|| <&#61; ||A|| &#43; ||B||
||AB|| &#61; ||A|| ||B||
*Forbenius范数&#xff1a;||A||F &#61; (∑i&#61;1~m∑j&#61;1~n (aij)^2)^1/2 <&#61;&#61;&#61;&#61;>等价于Rmn上的欧式范数
矩阵范数与向量范数兼容&#xff1a;||.||(n) : Rn和 ||.||(m) : Rm 为上的向量范数
任意矩阵A ∈ Rmn和任意向量x ∈ Rn存在如下不等式关系&#xff1a;
||Ax||(m) <&#61; ||A|| ||x||(n)
则称该矩阵范数可由向量范数导出&#xff0c;或者称其与向量范数兼容
*导出矩阵范数定义&#xff1a;||A|| &#61; max ||Ax||(m)
||x||(n)&#61;1
[||A||是向量Ax范数的最大值&#xff0c;向量x是范数为1的任意向量]
*导数矩阵
任意从Rn到Rm的线性变换&#xff0c;特别是f:Rn -> Rm的导数L&#xff0c;都可以表示为一个m*n的矩阵&#xff0c;为了确认可微函数f:Rn -> Rm的导数L&#xff0c;所对应的矩阵表示为l&#xff0c;引入Rn空间的标准基&#xff5c;e1, e2, ......, en&#xff5c;考虑向量
xj &#61; x0 &#43; tej&#xff0c;j &#61; 1, 2, ......, n
根据导数定义&#xff1a;lim(t->0) [f(xj) - (tlej &#43; f(x0))]/t &#61; 0
这表示&#xff0c;对于j &#61; 1, 2, ......, n 有&#xff1a;
lim(t->0) f(xj) - f(x0)/t &#61; Iej
[*Iej是矩阵I的第j列&#xff0c;向量xj与x0仅仅在第j个元素上存在差异&#xff0c;该元素上的差值为t]
因此&#xff0c;上式左侧等于偏导 ∂f/∂xj(x0)&#xff0c;通过向量中每个元素求极限的方式来计算向量极限&#xff0c;因此:
f(x) &#61; [f1(x)]
[.......]
[fm(x)]
---------->则有∂f(x)/∂xj(x0) &#61; [∂f1/∂xj(x0)]
[.................]
[∂fm/∂xj(x0)]
上述矩阵可以写为&#xff1a;
[∂f/∂x1(x0) .......... ∂f/∂xn(x0)] &#61; SHIFT NEXT
[∂f1/∂x1(x0), ........., ∂f/∂xn(x0)]
[.............................................]
[∂fm/∂x1(x0), ......, ∂m/∂xn(x0)]
matrix size : m*n]
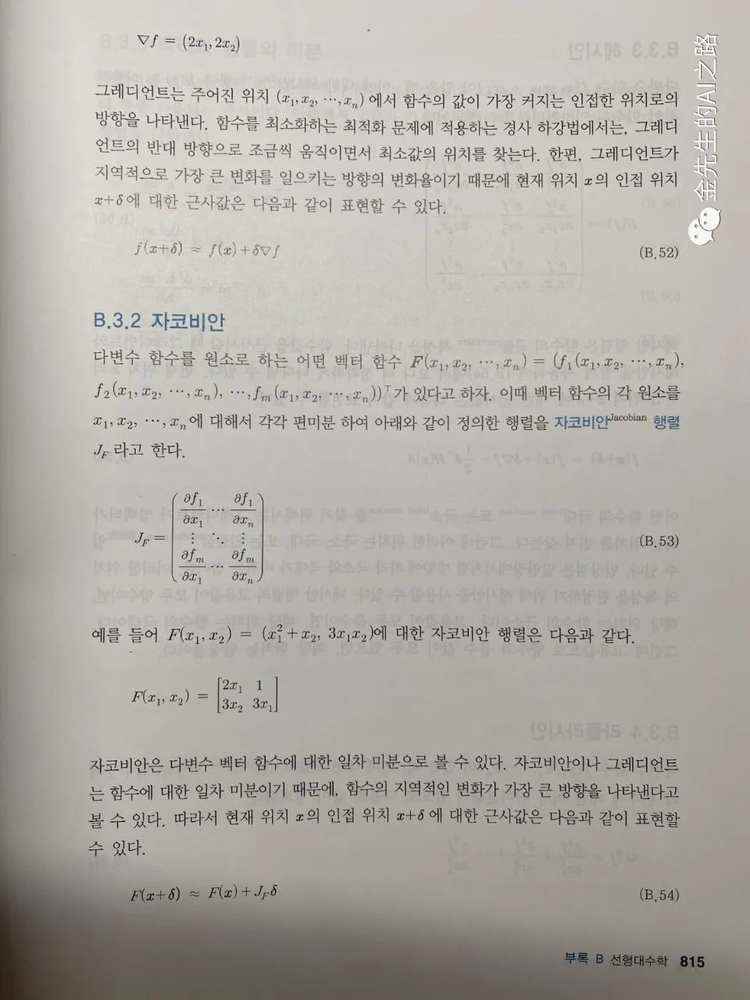
*矩阵I称为f在点x0的雅可比矩阵或者导数矩阵&#xff0c;记做Df(x0)&#xff0c;方便起见&#xff0c;常用Df(x0)表示f在点x0处的导数
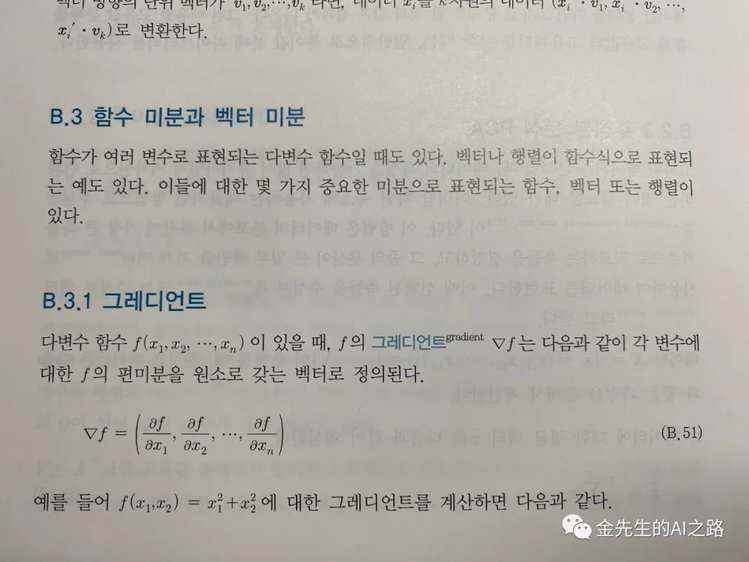
*Hessian Matrix黑塞矩阵
如果f: Rn -> R是可微的&#xff0c;那么函数&#xff1a;
▽f(x) &#61; [∂f/∂x1(x)]
[...............]
[∂f/∂xn(x)]
&#61; Df(x)^T 称为f的梯度
梯度是从Rn到Rm的函数&#xff0c;如果绘制梯度向量▽f(x)&#xff0c;其起点为点x&#xff0c;箭头方向为梯度下降方向&#xff0c;可将梯度表示为向量场
*给定函数f: Rn -> Rm&#xff0c;如果梯度▽f可微&#xff0c;则称f是二次可微的
▽f的导数记做&#xff1a;
D^2f &#61; [∂^2f/∂x1^2, ∂^2f/∂x2∂x1, .........., ∂^2f/∂xn∂x1]
[∂^2f/∂x1∂x2, ∂^2f/∂x2^2, .........., ∂^2f/∂xn∂x2]
[.....................................................................]
[∂^2f/∂x1∂xn, ∂^2f/∂x2∂xn, .........., ∂^2f/∂xn^2]
其中&#xff0c;∂^2f/∂xi∂xj表示f先对xj求导&#xff0c;再对xi求导的偏导数
**矩阵D^2f(x)称为f在点x的黑塞矩阵Hessian Matrix
*微分法则
利用函数f: R -> Rn和函数g:Rn -> R可构成复合函数g(f(x))&#xff0c;对其进行微粉时需要使用链式法则
:如果g: D -> R在开集合D ⊂ Rn上是可微的&#xff0c;且f:(a, b) -> D在(a,b)上可微&#xff0c;复合函数h:(a,b) -> R, h(t) &#61; g(f(x)) 在(a, b)上是可微的&#xff0c;且导数为&#xff1a;
h&#39;(t) &#61; Dg(f(t))Df(t) &#61;
▽g(f(t))^T [f&#39;(1)]
[......]
[fn&#39;(t)]
*水平集和梯度特性
函数f: Rn -> R在水平C上的水平集定义为
S &#61; {x: f(x) &#61; C}
对于f: R2 -> R 水平集S是一条曲线(二维空间中)
对于f: R3 -> R 水平集S是一组曲面(三维空间中)
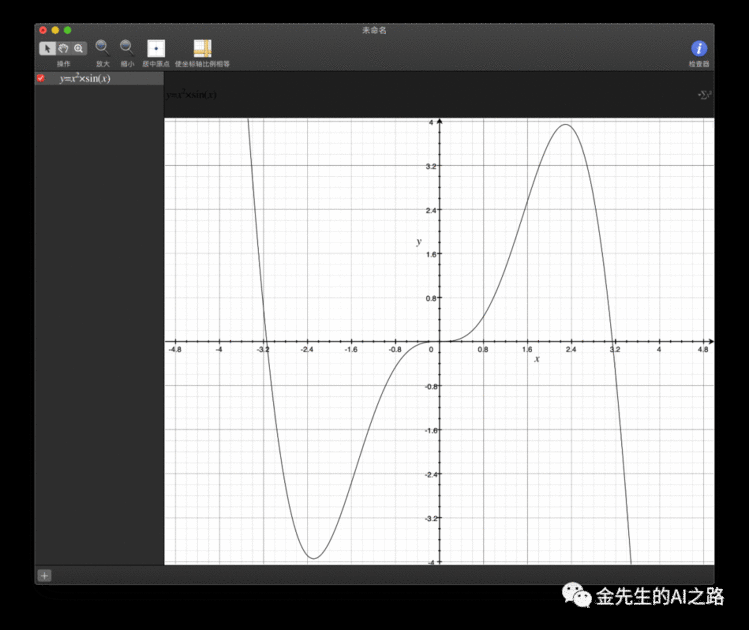

[以上图像绘制自MacBookPro Grapher简单二维曲线和RosenBrock香蕉函数]
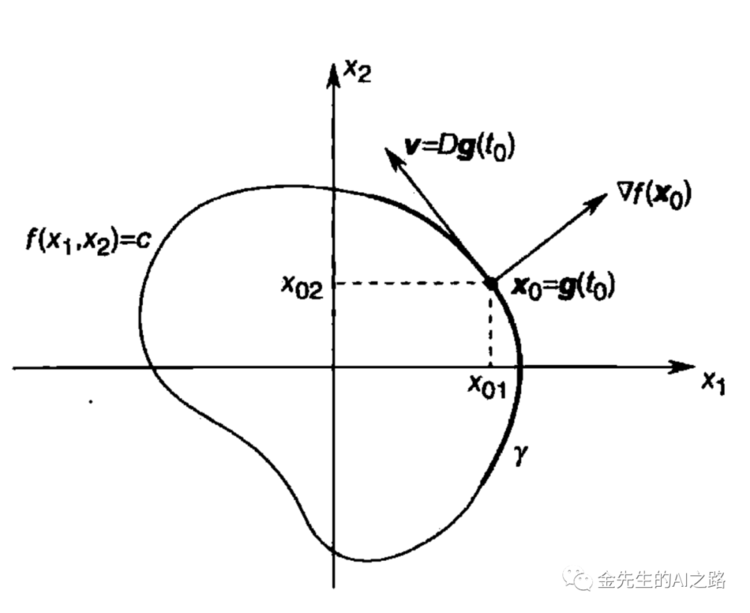
*当提到点x0位于函数f的水平为C的水平集上时&#xff0c;即&#xff1a;f(x0) &#61; C
设存在一条位于S中的曲线γ,可以用一个连续的可微函数g:R-> Rn进行参数化&#xff0c;同时设定g(t0) &#61; x0且Dg(t0) &#61; γ !&#61; 0&#xff0c;v为γ在x0点的切线向量
*利用链式法则求解函数h(t) &#61; f(g(t))/x0 在点t0上的导数
h&#39;(t0) &#61; Df(g(t0))Dg(t0) &#61; Df(x0)v
γ存在于水平集S中。h(t) &#61; f(g(t)) &#61; C h为常数&#xff0c;因此h&#39;(t0) &#61; 0且
Df(x0)v &#61; ▽f(x0)^Tv &#61; 0 (此处Df(x):导数矩阵or黑塞矩阵)
*水平集和梯度的几大特征总结&#xff1a;
(1). :对于水平为f(x) &#61; f(x0)的水平集中的任意一条经过点x0的光滑曲线其在点x0的切向量与函数f在点x0的梯度▽f(x0)正交(垂直)
(2).▽f(x0)在点x0处正交于水平集S(或者可理解为▽f(x0)为在x0点外水平集S的法向量)
(3).▽f(x0)为函数f在点x0处增加最快的方向&#xff0c;一个实值可微函数在某点增加/缩小速度最快的方向正交于函数f在该点的水平集(此处的结论为日后神经网络等算法的梯度下降法提供了理论根据)
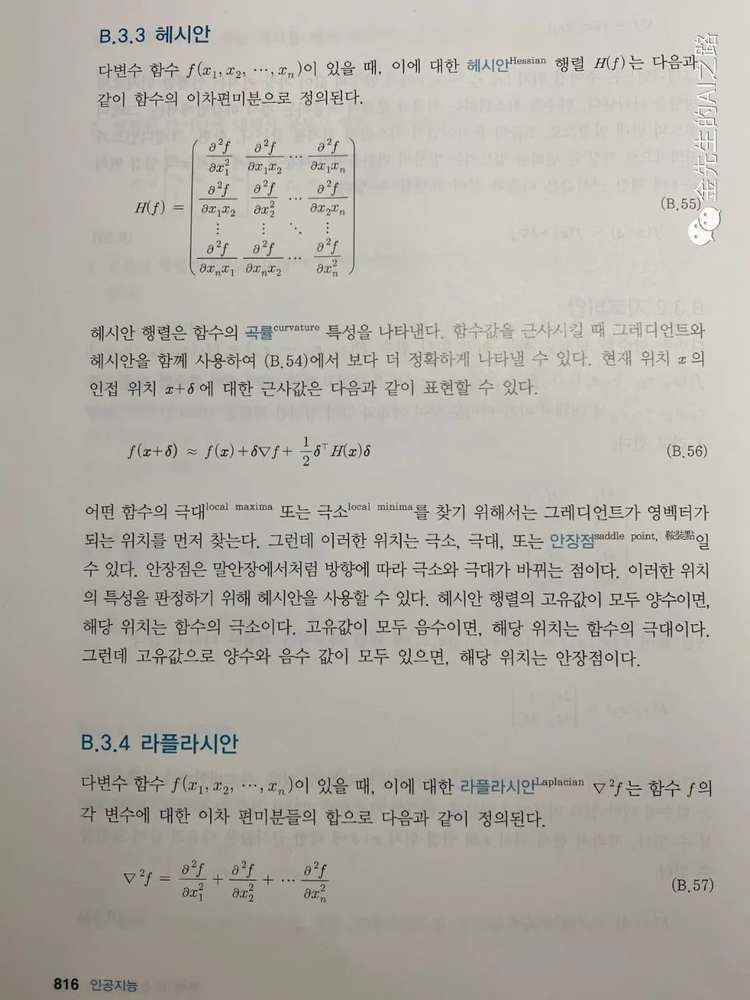
가: 그레디언트(梯度公式)
나 :자코비안(雅可比矩阵)
다: 헤시안 행렬(黑塞矩阵)
参考文献&#xff1a;An Introduction to Optimization (Fourth Edition)
인공지능 튜링 테스트에서 딥러닝까지생능출판 이건명 지음
end
AI技术交流 &#43; 兴趣讨论&#xff1a;






![[译]技术公司十年经验的职场生涯回顾](https://img8.php1.cn/3cdc5/24912/711/b6574f3292f9dc00.png)


 京公网安备 11010802041100号
京公网安备 11010802041100号