作者:双子-殇 | 来源:互联网 | 2023-02-10 19:20
YOLO全称You Only Look Once,是一个端到端(end-to-end)的目标检测算法,现在已经发展到第三个版本。由于第三个版本已经比较复杂,我们选择学习第一个版本。
github上有个同学实现了一个pytorch的版本:https://github.com/xiongzihua/pytorch-YOLO-v1
我基于他的源码学习,学习过程中的代码修改放在:https://git.dev.tencent.com/zzpu/yolov1.git
1 源码中使用的残差网络
YOLO V1原论文中使用CNN来提取图像的特征,最后使用全连接层做回归预测,并且借鉴GooLeNet的思路,使用了1×1卷积核。而在V3中开始借鉴了ResNet的残差结构,使用这种结构可以让网络结构更深。所以在这个源码的实现中没有按照原论文参考GoogLeNet,而是直接修改了pytorch的ResNet的官方实现作为前置网络。看下论文原版ResNet的网络结构
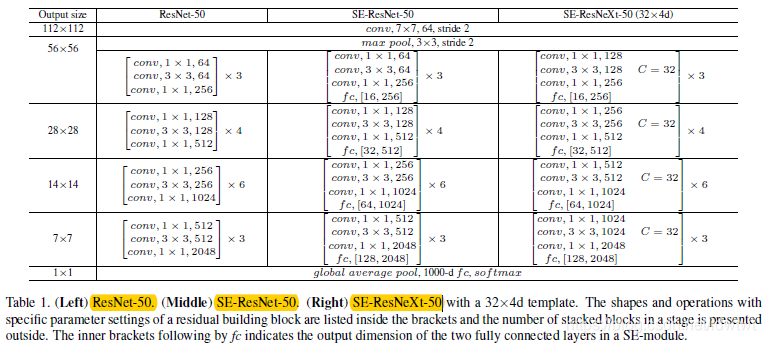
输入图片尺寸要求224*224,输出feature map尺寸为7*7。但是yolo要求输入图片尺寸为448*448,输出张量希望是7*7*30(本实现代码输出希望是14*14*30),所以需要对PyTorch官方实现的ResNet进行必要的修改。
Pytorch中:
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x) #输出B* block.expansion * 7*7
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
到layer4输出B* block.expansion * 7*7(其中B为Batch size),因为输入图片尺寸由224*224变为448*448,所以到layer4层输出feature map尺寸为14*14,为了构造14*14*30的输出张量,我们调整输出维度就可以:
class ResNet(nn.Module):
def __init__(self, block, layers, num_classes=1470):
self.inplanes = 64
super(ResNet, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
# self.layer5 = self._make_layer(block, 512, layers[3], stride=2)
#转换为256维的输出---feature map尺寸不变
self.layer5 = self._make_detnet_layer(in_channels=2048)
# self.avgpool = nn.AvgPool2d(14) #fit 448 input size
# self.fc = nn.Linear(512 * block.expansion, num_classes)
#调整输出维度为30
self.conv_end = nn.Conv2d(256, 30, kernel_size=3, stride=1, padding=1, bias=False)
self.bn_end = nn.BatchNorm2d(30)
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def _make_detnet_layer(self,in_channels):
layers = []
#尺寸不变
layers.append(detnet_bottleneck(in_planes=in_channels, planes=256, block_type='B'))
layers.append(detnet_bottleneck(in_planes=256, planes=256, block_type='A'))
layers.append(detnet_bottleneck(in_planes=256, planes=256, block_type='A'))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x) # 输出:224*224
x = self.bn1(x)
x = self.relu(x) # 输出:224*224
x = self.maxpool(x) # 输出:112*112
x = self.layer1(x) # 输出:112*112
x = self.layer2(x) # 输出:56*56
x = self.layer3(x) # 输出:28*28
x = self.layer4(x) # 输出:14*14
x = self.layer5(x) # 输出:14*14
x = self.conv_end(x) # 输出:1*30*14*14
x = self.bn_end(x) # 输出:1*30*14*14
x = torch.sigmoid(x) # 输出:1*30*14*14
# x = x.view(-1,7,7,30)
x = x.permute(0,2,3,1) # 输出:1*14*14*30 #(-1,7,7,30)
return x







 京公网安备 11010802041100号
京公网安备 11010802041100号