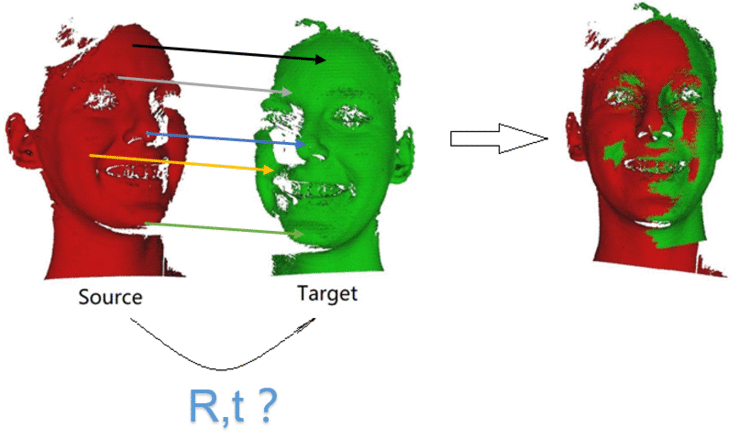
点云配准的一般思路是根据两个点云的匹配点,估计刚性变换矩阵[R t]。 空间刚性变换的3×4矩阵[R t]虽然包含12个数,但只有旋转和平移6个自由度(参数)。在SLAM中相机的位姿也用[R t]矩阵表示,称为SE(3)。 与所有视觉问题中求解数据关联的问题一样,点云配准的难点在于:如何自动找到两个点云中对应的匹配点。尽管有各种点云的特征点匹配算法,但最简单的方法是利用目标点云的就近点(Closet Point)作为源点云的对应点,找到对应点之后求[R,t]步骤则是相对容易,是一个典型的非线性优化问题。
ICP算法可以简单总结为“找近邻点-求Rt”这两个步骤的循环(ICP中的I就是迭代的意思)。
备注: 点击下面链接,进入奥比中光开发者社区,了解更多3D视觉技术信息:https://developer.orbbec.com.cn/ 或扫描下方二维码,进入奥比中光开发者社区:











 京公网安备 11010802041100号
京公网安备 11010802041100号