步骤1:
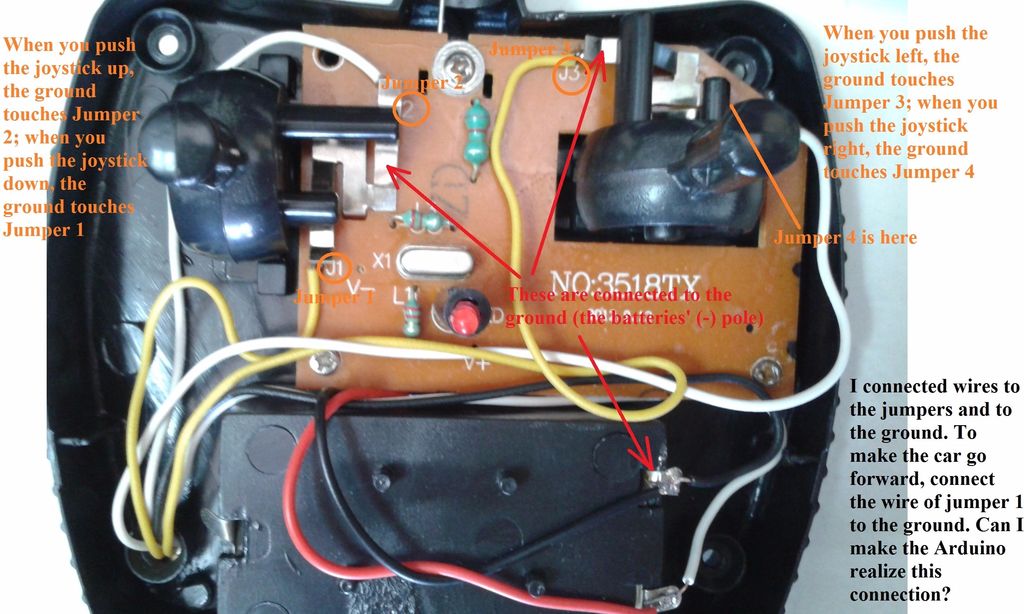

打开发送器后,必须首先检查什么“刺激”了给定命令。对于我的发送器,我发现连接器“接触”四个跳线以传递四个命令:前进,后退,左和右。跳线1(J1)用于反向命令,跳线2(J2)用于正向命令,跳线3(J3)用于左命令,跳线4(J4)用于右命令。
我测量了连接器与电池的正极(+)和负极(-)之间的电压。我发现这些连接器只不过是接地(或电池的负极)而已。这意味着要使汽车前进,我们必须将J2连接到地面(电池的负极(-)侧)。我将长线连接到跳线和地面,并标记了它们。
为避免与发射器一起使用电池,我将两根线连接到电池引脚的正极(+)和负极(-)。如果我给这些电源线提供3 V的电压,就不再需要使用电池。
步骤2:焊接一个简单的“平移”电路



现在,我们必须制作一个简单的电路,该电路使用Arduino命令将连接到跳线的电线接地(-)。该电路(检查图形)将Arduino命令“翻译”为发送器命令。它非常简单,并使用四个NPN晶体管和四个电阻。我使用了3x2N3904和1xBC548晶体管(家里没有2N3904!)和4x 1K电阻器。
步骤3:设置硬件-编写Arduino代码





将电路焊接到发射器导线(跳线),然后将其连接到Arduino。您现在可以编写Arduino代码了。
我从一个简单的代码开始,该代码从Arduino串行端口接收数据并相应地移动汽车。我为每个命令分配了一个字母:我选择“ F”表示前进,“ B”表示后退,“ R”表示右命令,“ L”表示左命令,“ S”表示停止。只要Arduino从PC收到一封信,就会将适当的命令发送到发送器。 arduino的引脚11连接到发送器中的前向命令(J2),引脚10连接到后向(J1),引脚13右边(J4),引脚12左边(J3)。
现在,您可以使用任何从PC发送这些字母的程序(Visual Basic,C ++,MATLAB,JAVA等)。
您还可以纠正使
注意:您可以将发射器与电池或外部电源连接使用,但请确保将Arduino的GND连接到电源的(-)侧供应商/电池连接器。
步骤4:进一步的改进-未来的工作
我的目标是制造一款廉价的实验性自主机器人,用于研究。我正在考虑使用头顶摄像头来检测机器人(RC汽车)的位置,并将该位置发送到根据人工智能(AI)算法控制汽车的计算机。因为我在机器人技术方面的工作是基于MATLAB的,所以我开发了MATLAB代码,允许用户使用键盘箭头和空格键控制汽车。将来,我计划将这个项目更新为具有网络摄像头反馈的完整无人地面车辆(UGV)。
MATLAB的主要代码是“ RC_CarControl.m”,“ getkey.m”是读取键盘上按下的按钮的函数。一旦完成了基于图像处理技术的位置反馈代码,我就可以轻松合并这两个代码。
第5步:开心结束











 京公网安备 11010802041100号
京公网安备 11010802041100号