作者:手机用户2702932821 | 来源:互联网 | 2023-08-10 16:18
而超低温和yedmt是模拟实验所重点要求的重要的测试环境。因而,无论是从设备安全角度还是从社会经济利益出发,对真空泵运行故障进行检测都具有重要的意义。传感器采用的PAC公司的R3α
当前,随着我国航空航天科技的发展,特别是空间推进技术的发展,航天器空间仿真实验对实验设备的要求逐渐提高。 超低温和yedmt是模拟中重点要求的重要测试环境。 其中真空泵是空间模拟器的核心设备之一,真空泵能否正常工作,决定着空间环境模拟器能否正常有效地完成航天器真空热环境实验。 其次,中国有很多航空航天基地,还有冶金行业等,真空泵拥有数量巨大。 因此,检测真空泵的运行故障,无论从设备安全性角度还是从社会经济利益角度来看,都具有重要意义。
在传统的机械故障诊断技术中,傅立叶变换是最常用的频域信号处理方法,但由于其自身的局限性,在面对非线性和时频变化规律时显得有些无能为力。 小波变换的采样步随频率的变化而变化,符合实际生活中高频信号对时间分辨率要求高、低频信号对频率分辨率要求高的特点[1],从而更能满足信号处理时对时域和频域的要求
奇异值分解(Singular Value Decomposition,SVD )是一种有效提取信号特征的方法,SVD得到的奇异值表征了数据的固有性质,其稳定性和不变性良好[2-3]。 研究表明,信号经过SVD后进行信号重构,可以有效地消除信号中的噪声,留下有用的信息[4-5]。 构建信号吸引子轨迹矩阵,对其进行SVD,通过计算选择合适的奇异值进行信号重构,从而去除信号中的随机部分,最大限度地保留信号的有用部分,去除信号噪声。
支持向量机(Support Vector Machine,SVM )是一种广泛用于模式识别的机器学习方法,其基本理论原理是统计学理论。 在处理多情歌曲、非线性、小样本的问题上,SVM具有很强的优势,本文选择SVM进行故障模式识别[6]。
本文将SVD与小波包变换相结合,实现真空泵故障特征的提取,并将提取的特征向量输入SVM,实现真空泵故障识别。
1奇异值分解(SVD )。
1.1 SVD原理
对于收集到的时间信号x(n ),假定其长度为n、n=1、2、3、4、n,进行相空间重构,假设其采样间隔为,则重构的吸引子轨迹矩阵a为[7] :
1.2基于SVD的信号去噪方法研究
对于收集到的时间序列x(n ),有用的信号和噪声混合存在。 研究表明,如果信号是平稳信号,则其吸引子轨迹矩阵的秩rmin(L,m ); 如果信号包含一定的噪声,则该吸引子轨迹矩阵的秩r=min(L,m ) [8]。 SVD的研究表明,与平滑信号的奇异值主要分布在前k个中相比,噪声信号奇异值对各维的贡献基本相等。 因此,如果对时间序列x(n )进行SVD,得到r个奇异值,按照大小顺序与1、2、…k、…、r排列,则信号的有用信息主要集中在上位k个奇异值上,下位r-k个奇异值表示更多的噪声信息。 要去除噪声,可以去除后r-k个奇异值,将其设定为零,得到新的对角矩阵。
对于分离次数k的选择,可以使用奇异值的贡献率来选择,以尽量保留有用的信号,贡献率被定义为:

贡献率在0.9以上时,认为几乎可以保留原信号的有用信息。
悲伤的自行车包拆解(WPD ) )。
与小波分解相比,小波包可以进一步分解上一层分解得到的高频带,提高信号的时-频分辨率,具有更高的应用价值[10]。
WPD算法如下:
Parseval公式,x(n )的小波包系数Cj,k的平方具有能量维,因此可以用WPD得到的能谱来表示信号的能量分布。
3实验系统与故障特征提取
3.1实验数据的收集
整个采集平台由上位机、倪公司采集卡6366、前置放大器、传感器组成。 采集卡的采样率最高为2 MS/s,支持8通道同时采集。 传感器采用PAC公司的R3,其中心频率为29 kHz。
实验采集真空泵正常运行和过载时的振动信号,采样率为100 kHz,每组采集5,000分。 收集130组数据,前60组为SVM训练样本,后70组数据为SVM模型检测样本。 用中科科仪公司生产的110分子泵机组进行实验,用PAC公司的R3采集,最后选择合适的实验样品进行分析。
3.2信号的特征提取
经过采集系统,得到真空泵的振动信号x(n ),图1是采集到的过载信号的原始图。
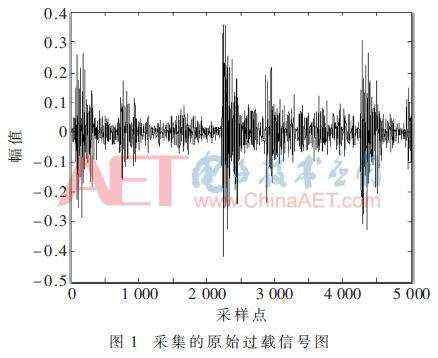
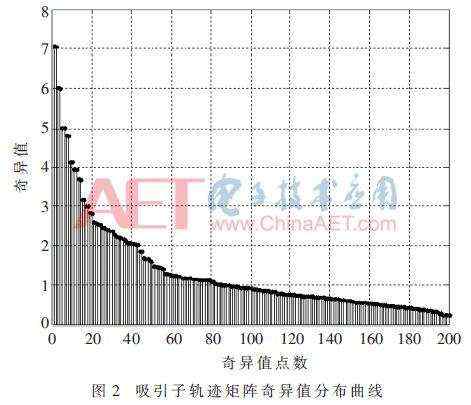
如上所述,对原始的过载信号x(n )进行奇异值分解来去除噪声。 首先计算x(n )的自相关函数,得到吸引子轨迹的延迟步长
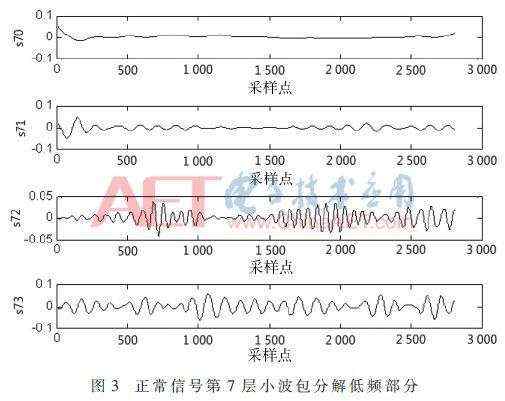
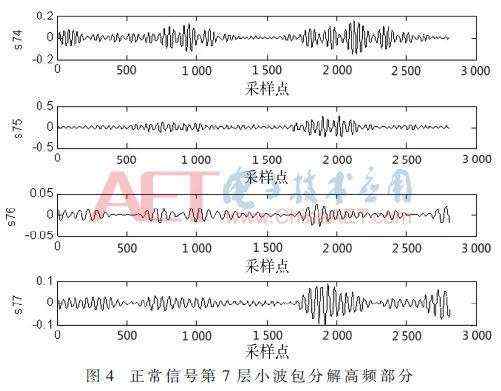
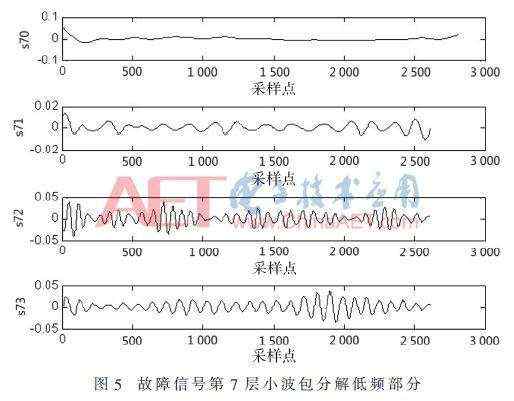
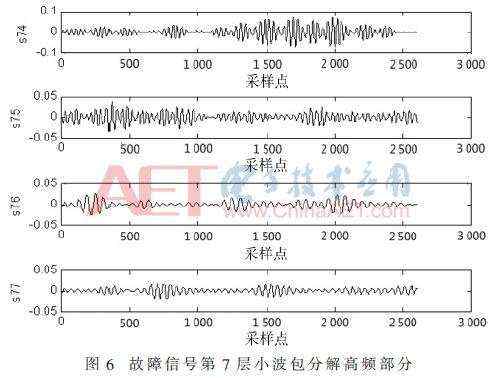
τ。经计算,τ为6。根据已经确定的延迟步长,对信号进行奇异值分解,奇异值分解如图2所示。选取嵌入维度为200,x(n)长度为5 000。选择根据贡献率来选定奇异值,本文保留90%的奇异值,经计算,对于测试信号,保留前142个,对后58个置零并进行信号重构,这样就得到了去噪后的测试信号。对去噪后的真空泵的正常和过载信号用db11小波进行7层WPD,通过小波包的分解与重构,选取能量集中的前8个频段,如图3~图6所示。其中,纵坐标表示幅值,s70、s71…s77分别表示第7层的第1、2…8个频段。
对于得到的8个有效频段,分别求其能量:
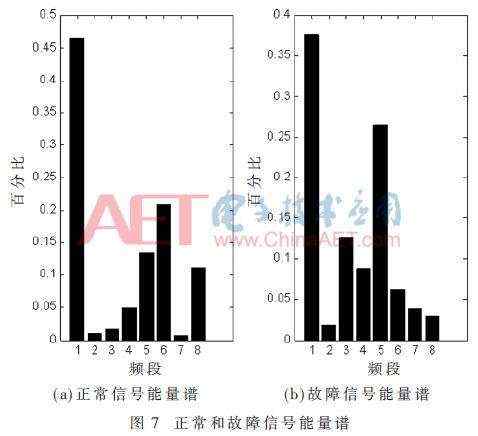
这样,可以得到一个由频段能量组成的8维向量[E0,E1,E2,E3,E4,E5,E6,E7],得到的小波包能量谱如图7所示。
4模式识别
支持向量机(SVM)是由Vapnik首先提出的,现在学者们常常将之用来解决线性回归以及模式识别的问题。SVM的解决问题思路是寻找一个适当的超平面来作为分类曲面,使得想要区分的样本之间的隔离边缘达到最大[12]。
测试信号首先进行SVD去噪,再经过7层WPD,得到第7层的8个频段的能量组成的8维向量作为SVM的输入。正常工作下的信号输出为1,故障情况下的输出为-1。 测试结果如图8所示。
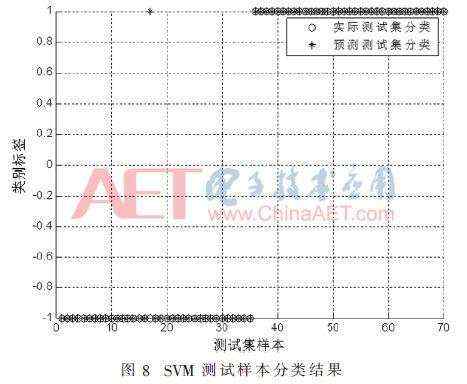
可以看到,SVM对故障和正常信号的判别正确率达到98.57%。这说明通过奇异值去噪和WPD提取的能量向量作为故障的特征信息是可行的。用训练样本对SVM进行训练,再对其用测试样本进行检验,得到的结果与实际符合,因而用SVM进行故障识别具有很强的可靠性。
5 结论
本文结合SVD、WPD以及SVM进行真空泵的故障识别。SVD能较好地去除信号中的无用噪声,再通过小波包的分解与重构来进行特征提取作为SVM的输入向量,具有非常高的准确率,能够准确高效地识别出真空泵的故障。因而,基于SVD、WPD以及SVM的真空泵故障诊断方法是有效可行的。







 京公网安备 11010802041100号
京公网安备 11010802041100号