作者:GYuan83_844 | 来源:互联网 | 2023-08-10 18:57
文章目录写在前面简单的concatTFN融合策略LWF融合策略论文全称:《TensorFusionNetworkforMultimodalSentimentAnaly
文章目录 写在前面 简单的concat TFN融合策略 LWF融合策略
论文全称:
写在前面 最近在做一个分类的比赛,想要用上数据中的多模态信息(主要是文本和图像特征),因此探索了一些多模态特征的融合机制,并记录下来。
下文中均以3种不同模态下的特征融合为例。并设A模态特征维度为512,B模态特征维度为1024,C模态特征维度为32。
import torch= torch. randn( 16 , 512 ) = torch. randn( 16 , 1024 ) = torch. randn( 16 , 32 )
简单的concat concat既是最简单也是最常用的一种方式,直接在特征维度将不同模态特征进行拼接后,再送入后续的推理模块。
fusion_feature = torch. cat( [ A, B, C] , dim= 1 )
TFN融合策略 原理简述
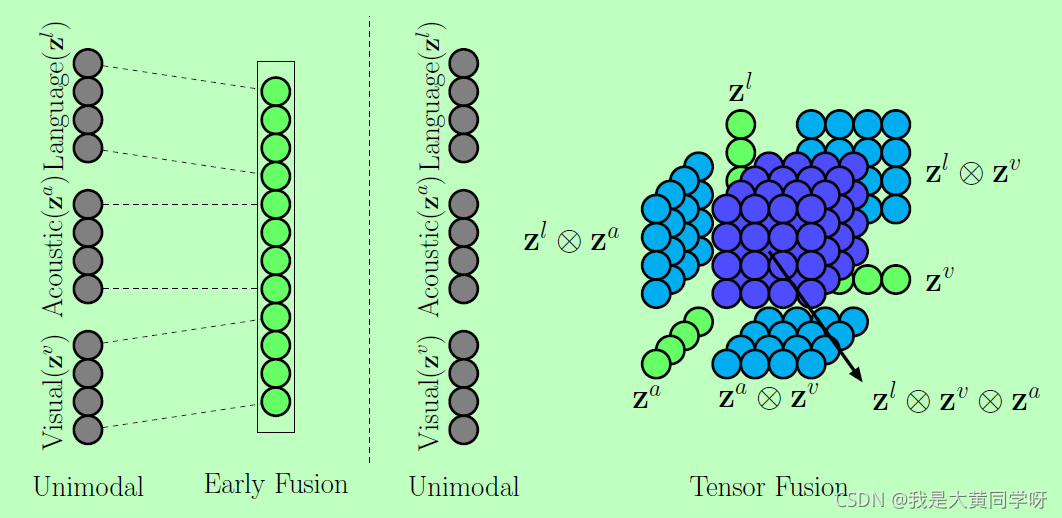
TFN来自17年EMNLP会议论文《Tensor Fusion Network for Multimodal Sentiment Analysis》,其主要考虑了inter-modality和intar-modality两个方面。也就是要求既能考虑各模态之间的特征融合,也要有效地利用各特定模态的特征。
Early Fusion策略,其实就是之前提到的concat方法,图右展现了作者提出的TFN模块(Tensor Fusion Network)。具体做法就是首先对每个模态用1进行维度扩充,然后对不同模态求笛卡尔积 。
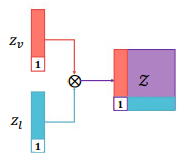
以两个模态为例,对zv,zlz_v,z_l z v , z l 1先扩充一维,得到后的特征再进行outer product(外积,张量积)。可以看到,用1扩充后,即计算了两个模态间的特征相关性,又保留了特定模态的信息。[za;1]⨂[zb;1]⨂[zc;1][z_a; 1] \bigotimes [z_b; 1] \bigotimes [z_c; 1] [ z a ; 1 ] ⨂ [ z b ; 1 ] ⨂ [ z c ; 1 ]
n = A. shape[ 0 ] = torch. cat( [ A, torch. ones( n, 1 ) ] , dim= 1 ) = torch. cat( [ B, torch. ones( n, 1 ) ] , dim= 1 ) = torch. cat( [ C, torch. ones( n, 1 ) ] , dim= 1 ) = A. unsqueeze( 2 ) = B. unsqueeze( 1 ) = torch. einsum( 'nxt, nty->nxy' , A, B) = fusion_AB. flatten( start_dim= 1 ) . unsqueeze( 1 ) = C. unsqueeze( 1 ) = torch. einsum( 'ntx, nty->nxy' , fusion_AB, C) = fusion_ABC. flatten( start_dim= 1 )
需要注意的是,实际编程实现时并未直接计算得到3-D的笛卡尔积,而是分别两两计算outer product。
LWF融合策略 上面提到的TFN对计算了两/三模态间的相关性,也保留了单模态的相关性,但同时也大大地增加了特征维度。增加特征维度从而会影响计算效率以及增加内存消耗,并且TFN所增加的时间/空间复杂度都与输入模态数呈指数增加。并且参数量一多,就容易增加过拟合的风险。
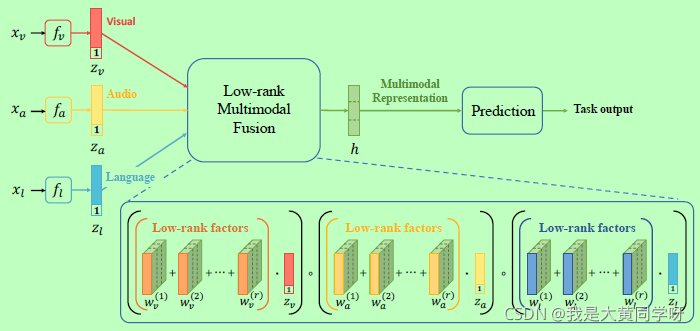
LMF是发表于ACL2017年的工作,针对TFN的上述问题,作者采用了low-rank weight进行多模态融合,降低参数量的同时还提升了计算速度。
建议先看看这篇博客:LWF论文解读
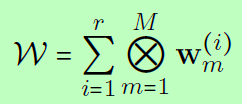
TFN中的融合后的特征Z 维度为d1xd2xd3x....dm,其中m表示模态数,i模态特征维度为di。后续要将其送入推理模块中,通常需要降到h维的特征F ,此时需要一个维度为(d1xd2xd3x....dm)xh的(M+1阶 )权重W 进行全连接操作。
全连接操作中,W 可以视为h个M阶矩阵,每个矩阵与融合特征Z 计算后的结果为F 中的一维。
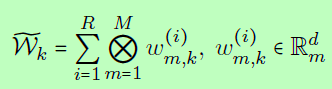
LMF要做的是就是将W 分解成M组与各模态相关 的low-rank因子。按照上述的视角,将W 视为h个矩阵,每个特征矩阵Wk 如下所示,其中使得分解成立的最小R称为秩(Rank)。r ,得到每个Wk 矩阵了,对特征矩阵进行重新排列,使其变为与模态m相关的特征Wm 。
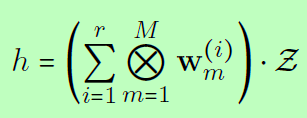
那么对特征变换(Z →d维特征 )的过程可以拆分为如下过程:
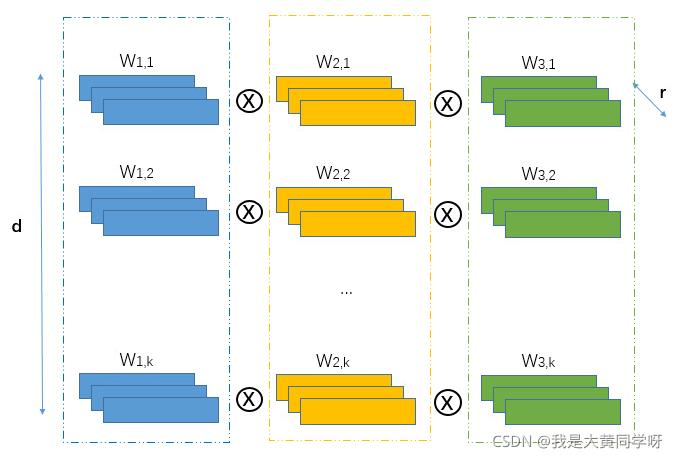
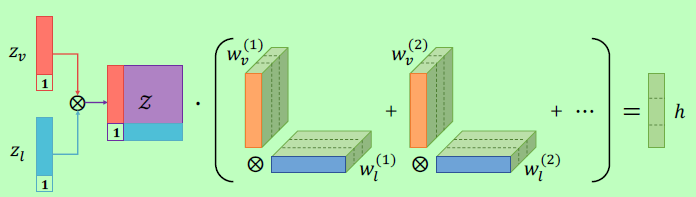
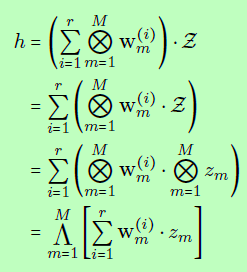
但Z 本身也是由不同模态的外积得到的,那么组合起来可得到下式。Λ\Lambda Λ Zm 去建模Z ,并且可以扩展到不同数量的模态上,大大降低了时间复杂度。以3模态的融合为例,图例如下:
Zm 融合成h维特征 的过程就变成了:每个模态分别构建r个权重矩阵,融合后对各模态特征进行矩阵乘法,得到一个h维的特征;然后再将各模态得到的h维特征进行像素级乘法即可。代码如下:
import torchimport torch. nn as nnfrom torch. nn. parameter import ParameterA = torch. randn( 16 , 512 ) = torch. randn( 16 , 1024 ) = torch. randn( 16 , 32 ) n = A. shape[ 0 ] = torch. cat( [ A, torch. ones( n, 1 ) ] , dim= 1 ) = torch. cat( [ B, torch. ones( n, 1 ) ] , dim= 1 ) = torch. cat( [ C, torch. ones( n, 1 ) ] , dim= 1 ) , h = 4 , 128 = Parameter( torch. Tensor( R, A. shape[ 1 ] , h) ) = Parameter( torch. Tensor( R, B. shape[ 1 ] , h) ) = Parameter( torch. Tensor( R, C. shape[ 1 ] , h) ) = Parameter( torch. Tensor( 1 , R) ) = Parameter( torch. Tensor( 1 , h) ) = torch. matmul( A, Wa) = torch. matmul( B, Wb) = torch. matmul( C, Wc) = fusion_A * fusion_B * fusion_C= torch. matmul( Wf, funsion_ABC. permute( 1 , 0 , 2 ) ) . squeeze( ) + bias



 京公网安备 11010802041100号
京公网安备 11010802041100号