对于自动驾驶的感知套件来说,传感器的组合越来越复杂。
按照此前智加科技(Plus)给出的L4级自动驾驶技术路线图,到2024年对于没有安全员的卡车自动驾驶方案来说,必须更新传感器组合。
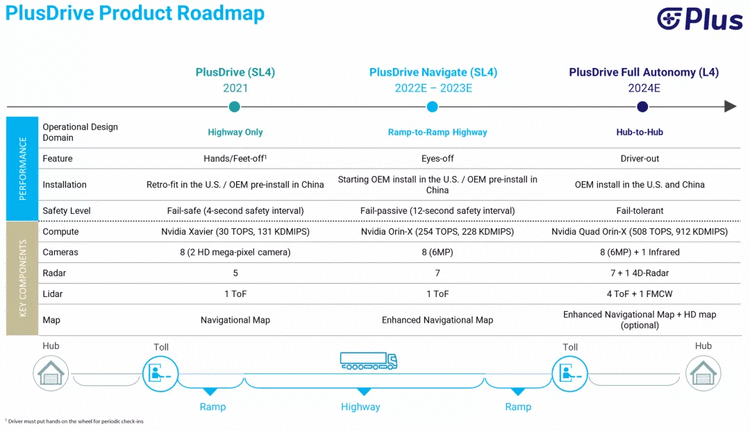
第一,增加高清摄像头数量,同时为了更好地识别行人和改善恶劣天气下的能见度,将增加红外摄像头。第二,除了传统毫米波雷达,需要增加4D成像雷达来提供更高的分辨率和更远的探测距离。
第三,随着FMCW(调频连续波)激光雷达技术方案的逐步成熟,除了现有的ToF激光雷达,必须要FMCW激光雷达来提供更高的分辨率和更远的探测距离,并且解决其他激光雷达的信号干扰问题。
同时,按照该公司的测算,随着传感器的增加,整体成本会在未来几年出现明显下降。数据显示,今年的传感器组合成本估计在9000美元左右,到2023年将下降至7000美元以下。
此外,最大的一笔隐性成本来自如何提升处理Corner Case的能力,而无论是通过模拟仿真还是真实道路测试,企业面临的挑战就是如何在短时间内以合理的成本获得足够多的测试验证。
一、
今年初,Teledyne公司宣布以80亿美元现金加股票的方式收购热成像传感器公司Flir Systems,这向汽车行业发出了一个明确的信号:热成像技术正在成为趋势。
在VSI Labs创始人Phil Magney看来,热成像技术最大的优势就是在弱光条件下检测行人。而在此之前,这样的技术仅仅是在部分豪华品牌车型上搭载,不过并没有和ADAS系统进行融合。
不过,大部分人可能认为,在目前的传感器组合中,可见光摄像头与毫米波雷达融合就足够支持行人检测,如果可以承担更多的成本,再增加激光雷达也许就足够了。
但热成像的优点也非常突出,能够在雾雨雪等恶劣天气条件下提高辅助驾驶及自动驾驶感知平台的性能,从而进一步实现全天候的感知性能保障。
在今年9月,智加科技宣布与Teledyne合作开发一个项目,探索在L4级自动驾驶技术中增加热成像摄像头感知能力。“对低能见度和高对比度条件下而言,热成像对于卡车自动驾驶系统而言,特别有用。”
从数据来看,热成像感知可以在250米的距离内检测和分类行人,这远远超出了目前汽车前大灯的照射范围。同时,在考虑未来可行的成本背景下,无疑增加了一层冗余能力。
不过,质疑者认为,激光雷达完成有能力解决上述问题。
但支持者认为,目前的激光雷达在较远距离(200米以上)对较小物体的检测和分类还不可靠。同时,激光雷达的技术原理是依靠物体返回的点来进行识别分类,而较远距离的物体可能不会在第一时间被光束探测,而且返回的点数量不够,也会直接影响系统判断。
相比之下,热成像可以通过密集的点云提供物体的距离信息,即使是在很远的距离,也可以为系统提供足够的响应时间,以解决行人、骑自行车的人和动物等生命体的漏报问题。
上个月,Teledyne公司宣布推出更高灵敏度的长波红外(LWIR)Tau 2热红外摄像头,灵敏度较之前的产品提高了1.5倍,并完全重新设计了图像处理引擎,以提供增强的清晰度和对比度,特别是需要远距离探测最小、最难发现的目标。
而在中国市场,一家名为几何伙伴的智能驾驶初创公司正在推动一套全新的高性价比、高性能、全天候感知组合:4D毫米波成像雷达+可见光视觉+红外成像。
就在今年8月,几何伙伴完成了总额近4亿人民币的Pre-A系列轮融资,获经纬、小米、百度等注资,并加速量产新一代架构的自动驾驶软硬件集成系统。
二、
公开信息信息显示,上汽集团与几何伙伴合作研发的软硬件集成系统正在快速推进中(面向L3级别具备局部自动驾驶功能的乘用车、面向固定场域L4级别的商用集卡)。
其中,这套系统的最大的亮点之一,就是以4D毫米波成像雷达为主传感,以及通过红外成像实现双重全天候感知能力。这对于目前的可见光感知来说,至关重要。
而从成本角度来看,即便是相比于可见光摄像头更加昂贵的红外成像,成本也远低于激光雷达。
到目前为止,包括大陆集团、采埃孚、安波福、博世、海拉等传统雷达供应商,以及傲酷、Arbe、蛮酷科技等初创公司都已经推出甚至是拿到4D雷达前装量产订单。
而就在本周,AI视觉芯片技术公司Ambarella, Inc.(安霸半导体)宣布,已与傲酷达成最终收购协议,后者的4D雷达感知软件将与CVflow® SoC发挥协同作用,提供全天候、低成本和可扩展的融合感知解决方案。
按照Arbe公司创始人的观点,“从安全角度来看,从辅助驾驶到自动驾驶,两者之间存在根本的区别。如何保障感知能力可以在任何时刻不会因为某种传感器出现问题而崩溃,是关键。”
而对于眼下辅助驾驶的能力升级,低成本、车规级、高可靠的技术路线,对于汽车制造商来说,无疑是一道关键的选择题。如果硬件成本过高,就意味着用户不买单的风险也在同步增大。
而在安波福看来,在传感器方面,以毫米波雷达为中心的解决方案提供了一种可选的高性价比方案路径,尤其是4D成像雷达的加入,意味着,接下来机器学习技术也可以使用来自雷达的数据,并与其他数据进行融合。
FLR4+,是安波福推出的首款4D成像雷达,探测距离超过300米,并且通过机器学习支持真正的高程目标识别,并且还着重强调了具有吸引力的价格/性能比。
在角雷达应用上,安波福也推出了SRR6+和SRR6 HD两个型号,前者的探测距离比前一代角雷达增加了一倍,并增加了更高分辨率的角度识别。后者则为代客泊车和低速自动驾驶提供最大的分辨率输出。
大陆集团则在首款4D成像雷达(ARS540)的基础上,正在加快第六代远程雷达和360环绕雷达的量产,预计2023年开始交付。
和此前五代雷达(ARS510、SRR520)相比,第六代毫米波雷达采用了共享软件和硬件平台的策略,降低了整体开发和生产的复杂度,从而继续降低成本,并且帮助客户减少测试和应用开发工程量。
此外,由于部分4D成像雷达公司(包括Mobileye在内)采取的是自研芯片的战略,这意味着会打破过去全球毫米波雷达芯片供应商的垄断局面,有利于芯片成本的进一步下降。目前,NXP、英飞凌都已经推出了4D成像雷达芯片方案。
在业内人士看来,未来几年,不管是汽车制造商还是自动驾驶公司,推动不同等级辅助驾驶及自动驾驶规模化落地的前提,都是需要一种更具有成本效益的方式。
按照一些公司的测算,4D成像雷达可以很快1-2年内达到目前传统雷达的成本,此外,考虑到软硬件解耦趋势,4D成像雷达在提供丰富点云数据的基础上,还可以实现OTA更新,来增加更多的功能应用。







 京公网安备 11010802041100号
京公网安备 11010802041100号