目录
外积
欧式变换
旋转矩阵和旋转向量
欧拉角
四元数
参考
从计算上来讲,外积就是两个向量的向量积,公式如下:

其中:i,j,k 分别为基向量:[1,0,0],[0,1,0],[0,0,1]
在三维几何中,向量a和向量b的外积结果是一个向量,更为熟知的叫法是法向量,该向量垂直于a和b向量构成的平面。在传感器标定上,可以使用外积进行坐标系转换。

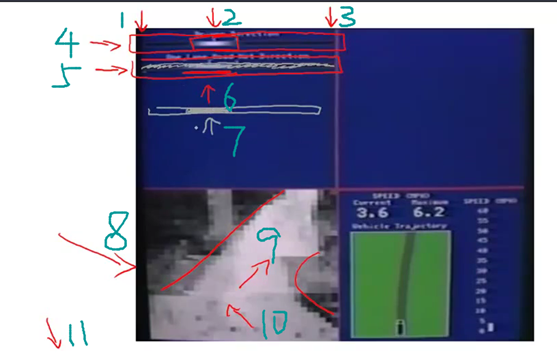
在自动驾驶中,往往需要有一个统一的坐标系,通常称为车体坐标系(有些也叫世界坐 标系),如下图中的 xw ,yw ,zw 定义的坐标系;同时,各传感器也都有各自的坐标系,假设相机坐标系,如下图中xc ,yc ,zc 定义的坐标系。 那么在相机视野中的某个向量坐标为 pc ,在世界坐标系下坐标则为 pw 。相机运动时,两个坐标之间的转换关系由变换矩阵 T 来表示

假设相机为刚性运动,那么同一个向量在各个坐标系下的长度和夹角不会发生变化,这种变换就可以称为欧式变换(由旋转+平移两部分组成)。
这位老哥,写的非常经典。
旋转变换(一)旋转矩阵_Frank的专栏-CSDN博客_旋转变换矩阵
旋转变换(二)欧拉角_Frank的专栏-CSDN博客_欧拉旋转
旋转变换(三)四元数_Frank的专栏-CSDN博客_旋转四元数
向量点乘(内积)和叉乘(外积、向量积)概念及几何意义解读_牧野的博客-CSDN博客_向量点乘






 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有 