之前一直使用ST的STM32F031单片机,但是由于疫情还是啥啥原因,ST的芯片价格涨得没法看,因为我们是做产品,而且量比较大,ST的芯片就无法再用了,这个成本真的扛不起。于是在
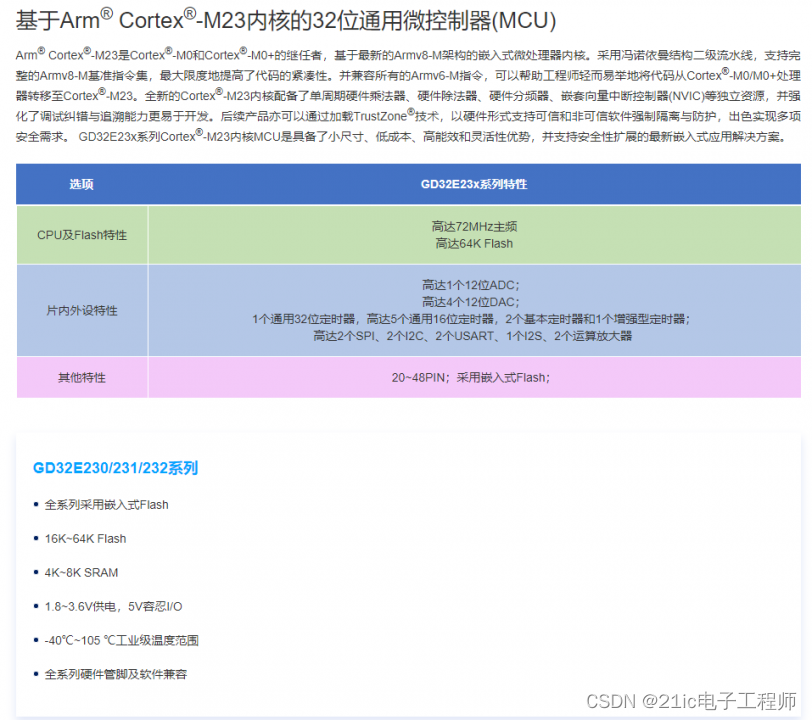
之前一直使用ST的STM32F031单片机,但是由于疫情还是啥啥原因,ST的芯片价格涨得没法看,因为我们是做产品,而且量比较大,ST的芯片就无法再用了,这个成本真的扛不起。于是在很多国产MCU里面做了甄选,最终GD的因为新能优越,价格便宜获选。GD32E230对标的STM32F031,实现了PIN TO PIN兼容,寄存器不是完全兼容,但是GD的主频可以实现72M,这就很恐怖,STM32F031才48M,之前还得超频到56M使用。不得不说,GD强!

仅仅对比固件库,GD的库函数封装的比ST的库要好很多,当然,ST现在主推HAL库,这个HAL库确实也很好。
在使用串口之前同样要配置引脚,时钟。
GPIO引脚配置
复制
void com_gpio_init(void)
{
rcu_periph_clock_enable(RCU_GPIOA);
gpio_af_set(GPIOA, GPIO_AF_1, GPIO_PIN_9);
gpio_af_set(GPIOA, GPIO_AF_1, GPIO_PIN_10);
gpio_mode_set(GPIOA, GPIO_MODE_AF, GPIO_PUPD_PULLUP, GPIO_PIN_9);
gpio_output_options_set(GPIOA, GPIO_OTYPE_PP, GPIO_OSPEED_10MHZ, GPIO_PIN_9);
gpio_mode_set(GPIOA, GPIO_MODE_AF, GPIO_PUPD_PULLUP, GPIO_PIN_10);
gpio_output_options_set(GPIOA, GPIO_OTYPE_PP, GPIO_OSPEED_10MHZ, GPIO_PIN_10);
gpio_mode_set(GPIOA, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_PIN_8);
gpio_output_options_set(GPIOA, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_8);
GPIO_BOP(GPIOA) = (uint32_t)GPIO_PIN_8;
GPIO_BC(GPIOA) = (uint32_t)GPIO_PIN_8;
}
串口使用USART0,对应PA9和PA10,相当于STM32的USART1;
配置USART时需要先复用PA9和PA10,使用gpio_mode_set()配置IO口的工作模式、输入输出类型。gpio_output_options_set()配置速度等参数。PA8为RS485的使能引脚。
串口配置
复制
void com_usart_init(void)
{
/* 使能USART时钟*/
rcu_periph_clock_enable(RCU_USART0);
/* USART 配置*/
usart_deinit(USART0);
usart_baudrate_set(USART0,2500000U);
usart_receive_config(USART0, USART_RECEIVE_ENABLE);
usart_transmit_config(USART0, USART_TRANSMIT_ENABLE);
usart_enable(USART0);
}
使能USART的时钟,设置波特率,使能接收和发送。
串口中断配置
串口中断的配置只需要一个API函数,相当简单。nvic_irq_enable(USART0_IRQn, 0);

下面是中断服务函数,被屏蔽的代码为直接操作寄存器,加快代码的速度,因为我的项目对串口的速度要求较高。
串口接收数据进入中断后首先获取USART中断标志位状态,通过usart_interrupt_flag_get(EVAL_COM, USART_INT_FLAG_RBNE)判断。然后用数组接收串口数据,判断数据是否是0x1A,符合条件进入if函数。判断串口数据接收标志位是否为RESET,然后通过函数发送数据,发送完失能串口中断,以便下一次进入中断,这里和st的库函数处理方法有所不同。我在测试的时候想用usart_flag_clear()函数清除掉中断标志位,但是在手册里没有清除中断标志位的选项,GD是采用失能串口中断的方式退出中断。
复制
void USART0_IRQHandler(void)
{
// if(RESET != (USART_STAT(USART0)&0x00000010))
// {
// GPIO_BOP(GPIOA) = (uint32_t)GPIO_PIN_8;
// receiver_buffer[0] = (uint16_t)(GET_BITS(USART_RDATA(USART0), 0U, 8U));
// USART_REG_VAL(USART0, USART_INT_TBE) |= BIT(USART_BIT_POS(USART_INT_TBE));
//
// }
//
// if(RESET != (USART_STAT(USART0)&0x00000040))
// {
// USART_TDATA(USART0) = (USART_TDATA_TDATA & transmitter_buffer[txcount++]);
// if(txcount == transfersize){
// USART_REG_VAL(USART0, USART_INT_TBE) &= ~BIT(USART_BIT_POS(USART_INT_TBE));
// GPIO_BC(GPIOA) = (uint32_t)GPIO_PIN_8;
// txcount = 0 ;
// }
// }
if(RESET != usart_interrupt_flag_get(EVAL_COM, USART_INT_FLAG_RBNE)){
/* receive data */
receiver_buffer[0] = usart_data_receive(EVAL_COM);
usart_interrupt_enable(EVAL_COM, USART_INT_TBE);
if(receiver_buffer[0] == 0x1A)
{
/* transmit data */
gpio_bit_set(GPIOA,GPIO_PIN_8);
while(usart_flag_get(USART0,USART_FLAG_TC)==RESET);
usart_data_transmit(EVAL_COM, transmitter_buffer[4]);
while(usart_flag_get(USART0,USART_FLAG_TC)==RESET);
gpio_bit_reset(GPIOA,GPIO_PIN_8);
// usart_flag_clear(USART0,USART_FLAG_TC);
usart_interrupt_disable(EVAL_COM, USART_INT_TBE);
}
}
}
运行结果

到此已经实现了USART接收中断,接收判断之后回复数据。
DMA配置
复制
void USART_DMA_Init(void)
{
dma_parameter_struct dma_init_struct;
/* enable DMA clock */
rcu_periph_clock_enable(RCU_DMA);
rcu_periph_clock_enable(RCU_CFGCMP);
syscfg_dma_remap_enable(SYSCFG_DMA_REMAP_USART0TX);
/* deinitialize DMA channel1 */
dma_deinit(DMA_CH3);
dma_init_struct.direction = DMA_MEMORY_TO_PERIPHERAL;
dma_init_struct.memory_addr = (uint32_t)RS485_TX_BUF;
dma_init_struct.memory_inc = DMA_MEMORY_INCREASE_ENABLE;
dma_init_struct.memory_width = DMA_MEMORY_WIDTH_8BIT;
dma_init_struct.number = 11;
dma_init_struct.periph_addr = USART0_TDATA_ADDRESS;
dma_init_struct.periph_inc = DMA_PERIPH_INCREASE_DISABLE;
dma_init_struct.periph_width = DMA_PERIPHERAL_WIDTH_8BIT;
dma_init_struct.priority = DMA_PRIORITY_MEDIUM;
dma_init(DMA_CH3,&dma_init_struct);
/* configure DMA mode */
dma_circulation_disable(DMA_CH3);
dma_memory_to_memory_disable(DMA_CH3);
}
DMA的配置过程和STM32差不多,同样是配置DMA的时钟,配置数据方向,基地址,外设地址,数据宽度,数据量等等。
DMA发送数据
因为我只用到DMA的发送,这里只介绍DMA的发送。
复制
void MYDMA_Send(uint8_t *buffer,uint16_t size)
{
DMA_CHCTL(DMA_CH3) &= ~DMA_CHXCTL_CHEN;//失能DMA
DMA_CHMADDR(DMA_CH3) = (uint32_t)buffer; //设置要发送的数据地址
DMA_CHCNT(DMA_CH3) = size ; //设置要发送的字节数目
DMA_CHCTL(DMA_CH3) |= DMA_CHXCTL_CHEN;//使能DMA
}
void RS_485_SEND(uint8_t *psrc_data,int num)
{
GPIO_BOP(GPIOA) = (uint32_t)GPIO_PIN_8;
MYDMA_Send(psrc_data,num);
while(RESET == usart_flag_get(USART0, USART_FLAG_TC));
GPIO_BC(GPIOA) = (uint32_t)GPIO_PIN_8;
}
当需要发送数据时直接调用RS_485_SEND即可。psrc_data为发送数组,num为发送数量。
---------------------
作者:呐咯密密
链接:https://bbs.21ic.com/icview-3052114-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。
原文链接:https://www.cnblogs.com/ic-dianzi/p/15969910.html









 京公网安备 11010802041100号
京公网安备 11010802041100号