作者:让自己更加成熟一点 | 来源:互联网 | 2023-08-19 20:04
在讲述了大量的概率图模型后,本篇介绍下它发挥作用的主要场景——序列标注(SequenceLabaling)。序列包括时间序列以及generalsequence,但两者无异。连续的序
在讲述了大量的概率图模型后,本篇介绍下它发挥作用的主要场景——序列标注(Sequence Labaling)。序列包括时间序列以及general sequence,但两者无异。连续的序列在分析时也会先离散化处理。常见的序列有如:时序数据、本文句子、语音数据、等等。常见的序列问题有:
- 拟合、预测未来节点(走势分析,如股票预测、销量预测等)
- 判定序列所属类别,即分类问题(如语音识别,判断声音序列所属来源)
- 判定序列中各个节点的类别,即序列标注问题
我们讨论的是序列标注问题。可以看到,常见的机器学习算法,无论是分类还是回归,都是给定了一个处理对象,然后给定一个整体的标签。而序列标注问题是针对一个处理对象(即序列)对其中的各个部分贴标签,这在处理思路上是完全不同的。传统的序列标注问题主要是用概率图模型求解,而近年来,随着深度学习的发展,适用于序列问题建模的RNN类模型大放异彩。本篇将介绍概率图和RNN-Based的两大类模型。
NLP中的序列标注问题
自然语言处理中,由于主要处理对象是语言,在以句子为单位进行处理时,很自然的就对应到了状态图。句子中不同的“词”(其实是句子中基本元素,可能是词、字或其它语素)就对应着序列的各个节点。句子中各个“词”的出现时有先后关系的,正如说话的过程有的话先说出来有的后说处理,因此这种序列又天然的可以用时间作为序列的测度。所以NLP中的问题通常建模为时间序列问题。许多NLP问题都可以转化为序列标注问题,常见的如:
- 中文分词(Chinese Word Segmentation):将给定句子切分为具有合理语义的词序列。在分词问题中,序列节点的“词”对应为句子中的每个字,节点的标签空间为{B,I,E,S}。B表示这个字是某个词的开头,I表示这个字是某个词的中间部分,E表示这个字是某个词的结尾,S表示这个字单独成词。每个字最终都会打上对应标签,最终根据标签序列来确定分词结果。
- 词性标注(Part-of-Speech Tagging):给定已分词的句子,将句子中的所有词标记词性。这里的“词”对应的就是已分词的词序列中的词,节点的标签空间为词性标记空间如{noun,verb,adj,…}。每个词最终都会打上词性标签。
- 命名实体识别(Named Entity Recognition):找出给定句子中的命名实体(常见的有人名、地名、机构名)。NER问题中,序列节点的“词”对应为句子中的每个字,节点的标签空间为{B,I,E,O}。B表示这个字是某个命名实体的开头,I表示这个字是某个命名实体的中间部分,E表示这个字是某个命名实体的结尾,O表示这个字不属于命名实体部分。根据最后的标签序列确定识别结果。
- ……
概率图模型
由于之前已经比较详细地讲解了各个概率图模型的原理,在此只简要描述问题解决过程。
给定隐马尔科夫模型HMM,序列标注问题对应于HMM中的解码问题,即给定观测序列的基础上,如何求隐状态序列。“词”对应的是序列节点,标签对应的是隐状态节点。使用Viterbi算法进行求解,找到概率最大的标签序列作为结果即可。
顺带一提。HMM中的评估问题,即给定观测序列求其出现的概率,可以对应到是我们上面讲的序列分类问题上。比如语音识别问题,给定音频序列,如何判断是人发出的声音还是狗发出的声音?我们利用人发声的样本集A和狗发声的样本集B分别训练得到两个HMM, λA,λB λ A , λ B 。针对一条新的样本,分别代入两个模型中计算,比较计算出的概率大小,划定为概率较高的模型对应建模类别即可。
给定最大熵模型(虽然最大熵模型不属于概率图模型的范畴,但按照之前讲解的顺序还是提一下),最大熵模型利用条件概率 P(Y|X) P ( Y | X ) 直接对标签空间建模。由于最大熵模型基于特征函数,所以在样本构建时,除了原始序列节点外还需要加入每个节点的相关特征。在求解时,最优标签序列为 y∗=argmaxyp(y|x) y ∗ = arg max y p ( y | x ) ,注意这里的 y y 不再是单个标签,而是一个标签序列,这是理解概率图建模的关键。
给定最大熵马尔可夫模型MEMM,与最大熵模型相同,也是利用条件概率建模,但条件概率的求解中引入了状态的概念。 P(Y|X) P ( Y | X ) 分解为每个状态概率的连乘,每个状态都用一个最大熵模型建模。求解的逻辑与最大熵模型是类似的。
给定条件随机场CRF,序列标注问题对应于CRF中的解码问题。CRF也是基于状态,利用特征函数,在全局范围内进行概率归一。CRF由于使用了特征函数,使得其能够挖掘观测序列之间的关系,解决了输出独立性问题;由于使用了全局范围内的概率归一,解决了MEMM的标注偏置问题。求解的逻辑与HMM是类似的,也是使用Viterbi算法求解。
可以看到,CRF综合了HMM、最大熵模型、MEMM的优点,同时解决了它们各自具有的问题,在算法设计是概率图模型中最完备的。实际使用中,序列标注问题上CRF也是概率图模型中效果最好的。
RNN-Based模型
循环神经网络之前也做过总结,下图中,对齐的many-to-many网络架构(最后一个)能够很好的对应到序列标注问题:
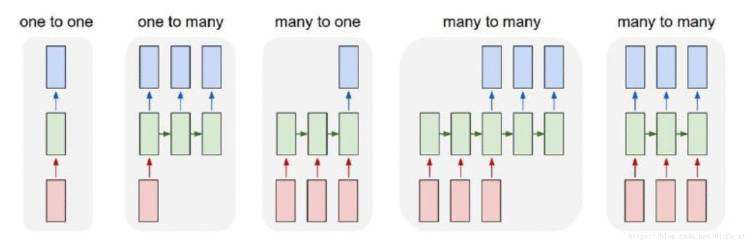
其中,红色的block是输入对应的是待标注的序列,绿色的block是核心网络负责进行特征表示的学习,蓝色的block是标签解码层负责输出对应的标注。核心网络是设计的重点,一般采用的Bidirectional-RNN,双向建模序列能融合上下文的特征。NN模型的优势是通过巨大的参数空间来拟合非线性的关系,但注意到,NN模型的输出也是独立的,这就导致会出现一些不合理的标签序列。比如在分词模型中,出现”B,B”之类的标签段,而这是不合理的标签。
Bi-RNN+CRF
由于RNN-Based模型存在输出独立性问题,我们考虑改进网络结构。参考概率图模型中的最优代表CRF,它通过定义两类特征函数,关联起了前后的隐状态和观测序列。如何将CRF的思想引入神经网络?我们考虑将Bi-RNN得到的表示特征作为观测序列,在输出层(观测序列)上添加一层神经元模拟CRF中隐状态,架构图如下(命名实体识别任务):
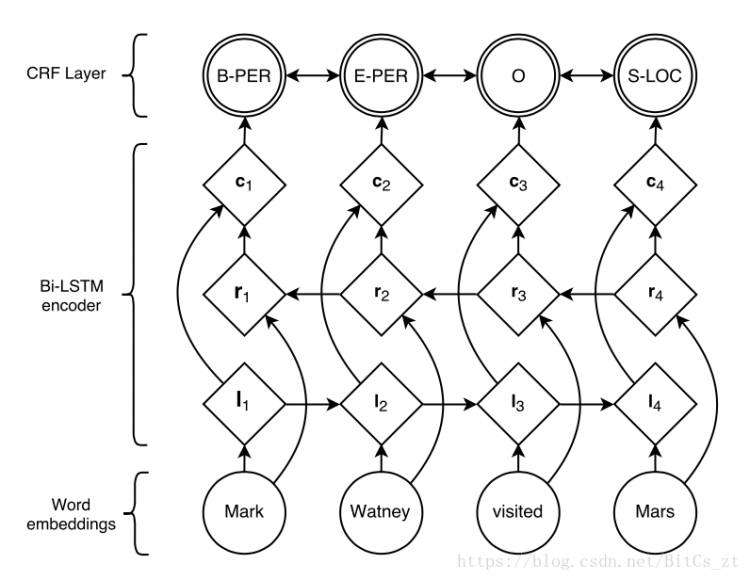
可以看到网络架构是三部分,词向量转化、Bi-RNN特征提取层、CRF层。特征提取层最终输出为 ci=σ(Wcconcat[li,ri]+bc) c i = σ ( W c c o n c a t [ l i , r i ] + b c ) ,把它作为CRF的观测序列。接下来定义CRF的特征函数。类似于HMM,定义状态转移打分矩阵 A A 和状态观测值打分矩阵 P P ,其中 Ai,j A i , j 表示从隐状态 i i 转换到隐状态 j j 的打分, Pk,i P k , i 表示观测值 k k 在隐状态 i i 下的打分。注意,这里的矩阵并不是概率矩阵,因此没有归一化计算。基于这两个矩阵,构造打分函数来模拟CRF的特征函数的打分求和:
s(X,Y)=∑Li=0Ayi,yi+1+∑Li=1Pxi,yi s ( X , Y ) = ∑ i = 0 L A y i , y i + 1 + ∑ i = 1 L P x i , y i
原始的Bi-RNN模型最终的输出是一个向量,向量元素表示各类标签的打分。我们只需要把每个节点的输出向量合并起来,就得到了矩阵 P P 。对应到上述模型架构中,我们只需要将特征 ci c i 映射为一个输出向量 oi o i ,然后拼接起来就得到了 P P 。所以在上述打分函数中, xi x i 实际上指的就是 oi o i ,代表的是序列在位置 i i 的观测值。而矩阵 A A 则建模了标签之间转换的合理性,即可以避免”B,B”这种标签段的出现,解决了输出独立的问题。基于上式的条件概率定义如下:
P(Y|X)=es(X,Y)∑ies(X,Yi) P ( Y | X ) = e s ( X , Y ) ∑ i e s ( X , Y i ) ,
Yi Y i 表示所有可能的标签序列
训练过程的优化目标为:
maxlog(P(Y|X)) max log ( P ( Y | X ) )
采用梯度下降法进行BP训练,更新包括 A,P A , P 在内的参数。在预测过程中,前馈计算得到 s(X,Y) s ( X , Y ) ,则标签序列为:
Y∗=argmaxYs(X,Y) Y ∗ = arg max Y s ( X , Y )
本篇总结了NLP中的序列标注任务,简要阐述了概率图模型、RNN-Based模型、Bi-LSTM+CRF三类方法的建模过程和建模动机。概率图模型和RNN-Based模型可以参见之前的总结笔记。
参考如下,在此表示感谢:
- 中国科学院大学-自然语言处理(胡玥老师)的课程讲义
- 如何用简单易懂的例子解释条件随机场(CRF)模型?它和HMM有什么区别?
- 论文-Neural Architectures for Named Entity Recognition










 京公网安备 11010802041100号
京公网安备 11010802041100号