1.37.BatchNormalization,批规范化1.37.1.BatchNorm介绍1.37.2.Intuitiveexplanation1.37.3.Intuitivee
1.37.Batch Normalization,批规范化
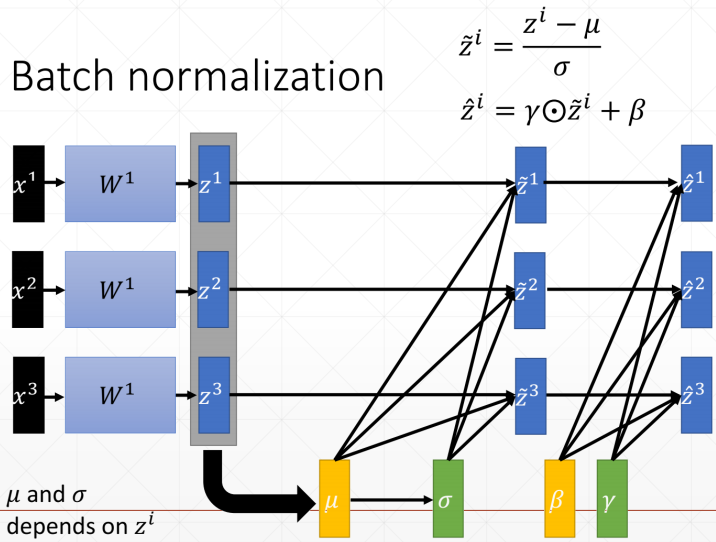
1.37.Batch Normalization,批规范化 1.37.1.Batch Norm介绍 Batch Normalization(简称为BN)[2],中文翻译成批规范化 ,是在深度学习中普遍使用的一种技术,通常用于解决多层神经网络中间层的协方差偏移 (Internal Covariate Shift)问题,类似于网络输入进行零均值化和方差归一化的操作,不过是在中间层的输入中操作而已。
1.37.2.Intuitive explanation
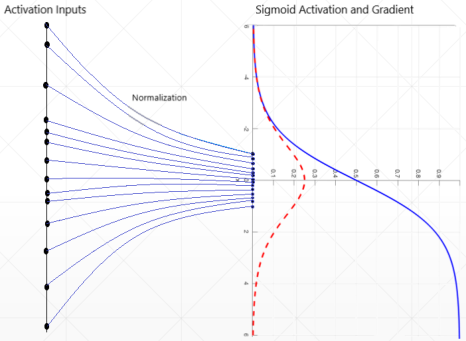
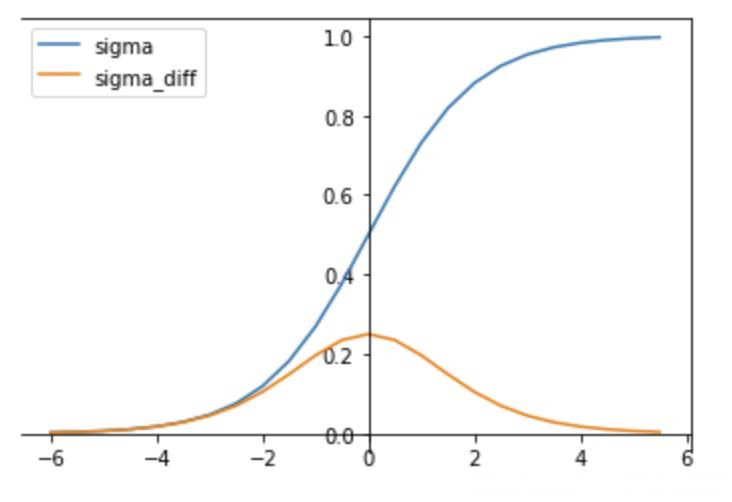
1.37.3.Intuitive explanation 使用sigmoid会出现梯度消失的情况,在实际训练中,引入了BatchNorm操作,可以将输入值限定在(γ = 1 , β)之间
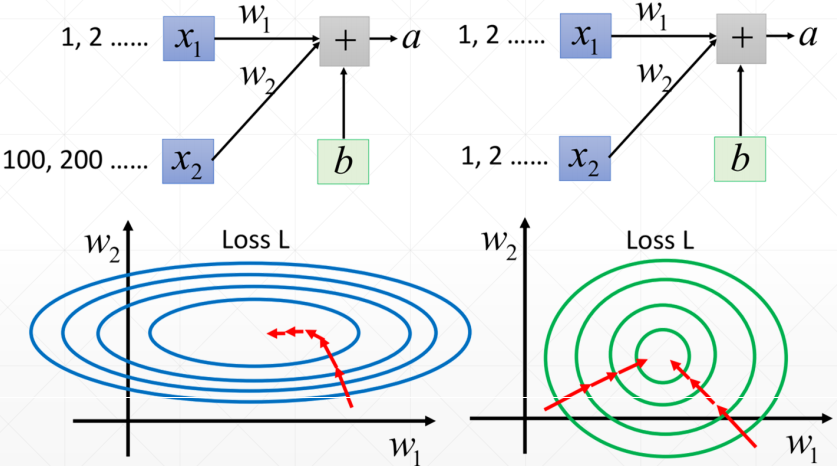
1.37.4.Feature scaling Image Normalization
normalize = transforms. Normalize( mean= [ 0.485 , 0.456 , 0.406 ] , std= [ 0.229 , 0.224 , 0.225 ] )
Batch Normalization
1.37.5.BatchNorm1d、BatchNorm2d、BatchNorm3d 1.37.5.1.nn.BatchNorm1d(num_features) 1 . 对小批量( mini- batch) 的2d 或3d 输入进行批标准化( Batch Normalization) 操作2. num_features:来自期望输入的特征数,该期望输入的大小为'batch_size x num_features [x width]' 意思即输入大小的形状可以是'batch_size x num_features' 和 'batch_size x num_features x width' 都可以。(输入输出相同)输入Shape:(N, C)或者( N, C, L) 输出Shape:(N, C)或者(N,C,L)eps:为保证数值稳定性(分母不能趋近或取0 ), 给分母加上的值。默认为1e - 5 。momentum:动态均值和动态方差所使用的动量。默认为0.1 。affine:一个布尔值,当设为true,给该层添加可学习的仿射变换参数。3 . 在每一个小批量(mini- batch)数据中,计算输入各个维度的均值和标准差。gamma与beta是可学习的大小为C的参数向量(C为输入大小)在训练时,该层计算每次输入的均值与方差,并进行移动平均。移动平均默认的动量值为0.1 。在验证时,训练求得的均值/ 方差将用于标准化验证数据。 4 . 例子>> > >> > m = nn. BatchNorm1d( 100 ) >> > >> > m = nn. BatchNorm1d( 100 , affine= False ) >> > input = autograd. Variable( torch. randn( 20 , 100 ) ) >> > output = m( input )
1.37.5.2.nn.BatchNorm2d(num_features) 1 . 对小批量( mini- batch) 3d 数据组成的4d 输入进行批标准化( Batch Normalization) 操作2. num_features: 来自期望输入的特征数,该期望输入的大小为'batch_size x num_features x height x width' (输入输出相同)输入Shape:(N, C,H, W) 输出Shape:(N, C, H, W)eps: 为保证数值稳定性(分母不能趋近或取0 ), 给分母加上的值。默认为1e - 5 。momentum: 动态均值和动态方差所使用的动量。默认为0.1 。affine: 一个布尔值,当设为true,给该层添加可学习的仿射变换参数。3 . 在每一个小批量(mini- batch)数据中,计算输入各个维度的均值和标准差。gamma与beta是可学习的大小为C的参数向量(C为输入大小)在训练时,该层计算每次输入的均值与方差,并进行移动平均。移动平均默认的动量值为0.1 。在验证时,训练求得的均值/ 方差将用于标准化验证数据。4 . 例子>> > >> > m = nn. BatchNorm2d( 100 ) >> > >> > m = nn. BatchNorm2d( 100 , affine= False ) >> > input = autograd. Variable( torch. randn( 20 , 100 , 35 , 45 ) ) >> > output = m( input )
1.37.5.3.nn.BatchNorm3d(num_features) 1 . 对小批量( mini- batch) 4d 数据组成的5d 输入进行批标准化( Batch Normalization) 操作2. num_features: 'batch_size x num_features depth x height x width' , C,D, H, W) 输出Shape:(N, C, D, H, W)eps: 为保证数值稳定性(分母不能趋近或取0 ), 给分母加上的值。默认为1e - 5 。momentum: 动态均值和动态方差所使用的动量。默认为0.1 。affine: 一个布尔值,当设为true,给该层添加可学习的仿射变换参数。3 . 在每一个小批量(mini- batch)数据中,计算输入各个维度的均值和标准差。gamma与beta是可学习的大小为C的参数向量(C为输入大小)在训练时,该层计算每次输入的均值与方差,并进行移动平均。移动平均默认的动量值为0.1 。在验证时,训练求得的均值/ 方差将用于标准化验证数据。4 . 例子>> > >> > m = nn. BatchNorm3d( 100 ) >> > >> > m = nn. BatchNorm3d( 100 , affine= False ) >> > input = autograd. Variable( torch. randn( 20 , 100 , 35 , 45 , 10 ) ) >> > output = m( input )
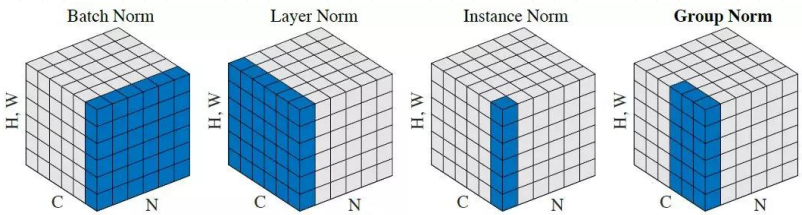
1.37.6.Batch Norm 目前已知的Normalization的方法有4种,对于输入数据为[N,C,(H * W)] (N代表tensor数据,C代表通道,H代表高,W代表宽)
pytorch中的实现:
import torchimport torch. nn as nnx = torch. rand( 100 , 16 , 784 ) = nn. BatchNorm1d( 16 ) = layer( x) print ( layer. running_mean) """
可以自行对上述结果进行验证,该结果的平均值恰好为0.5
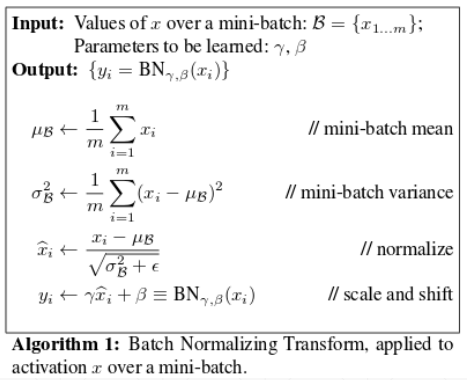
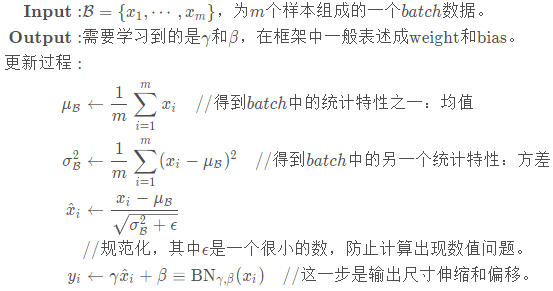
1.37.7.Pipeline Batch Normalization的规范化写法为:
网友的解释,如下:仿射(affine) ,引入这一步的目的主要是设计一个通道,使得输出output至少能够回到输入input的状态(当γ = 1 , β = 0时)使得BN的引入至少不至于降低模型的表现,这是深度网络设计的一个套路 。
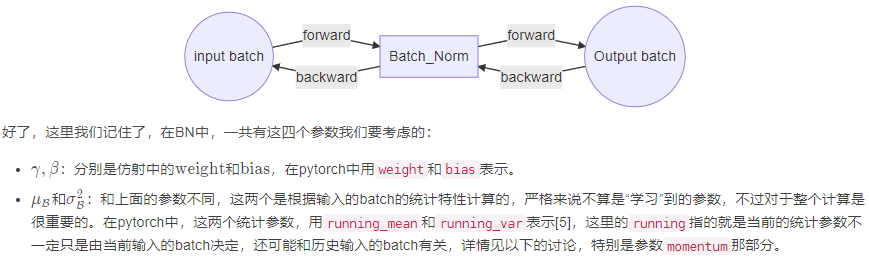
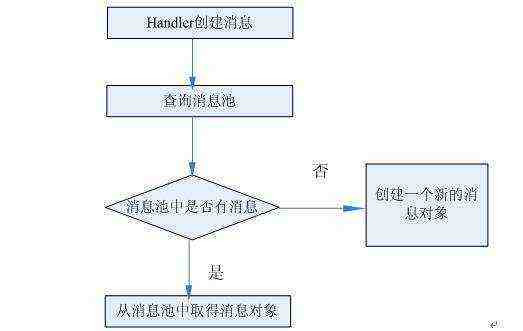
整个过程见流程图,BN在输入后插入,BN的输出作为规范后的结果输入的后层网络中。代码示例:
import torchimport torch. nn as nnx = torch. rand( 1 , 16 , 28 , 28 ) = nn. BatchNorm2d( 16 ) = layer( x) print ( layer. running_mean) """ print ( layer. weight) """
这里的weight即为σ值
layer. eval ( ) . BatchNorm1d( 16 , eps= 1e - 05 , momentum= 0.1 , affine= True , track_running_stats= True )
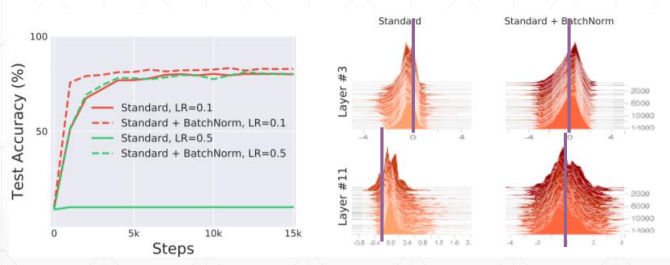
Batch Norm具有相当优异的使用效果,如下图所示:
再如案例:
import torchimport torch. nn as nnm = nn. BatchNorm2d( 2 , affine= True ) input = torch. randn( 1 , 2 , 3 , 4 ) = m( input ) print ( "输入图片:" ) print ( input ) """ print ( "归一化权重:" ) print ( m. weight) """ print ( "归一化的偏重:" ) print ( m. bias) """ print ( "归一化的输出:" ) print ( output) """) print ( "输出的尺度:" ) print ( output. size( ) ) """ print ( "输入的第一个维度:" ) print ( input [ 0 ] [ 0 ] ) """ firstDimenMean = torch. Tensor. mean( input [ 0 ] [ 0 ] ) = torch. Tensor. var( input [ 0 ] [ 0 ] , False ) print ( m. eps) """ print ( "输入的第一个维度平均值:" ) print ( firstDimenMean) """ print ( "输入的第一个维度方差:" ) print ( firstDimenVar) """ bacthnormone = ( ( input [ 0 ] [ 0 ] [ 0 ] [ 0 ] - firstDimenMean) / ( torch. pow ( firstDimenVar+ m. eps, 0.5 ) ) ) * m. weight[ 0 ] + m. bias[ 0 ] print ( bacthnormone) """)
1.37.8.参考博文 https://blog.csdn.net/loseinvain/article/details/86476010







 京公网安备 11010802041100号
京公网安备 11010802041100号