目录
- 概述
- 细节
- 相关工作
- 网络结构
- 点云及点云的性质
- 针对点云性质的处理
- 简单实现
概述
首先,本文是基于点云,并且直接处理点云数据的3D目标检测网络
本文提出了一个简单的网络,考虑点云的特性,直接处理点云数据,用于分类或者分割等任务。
细节
相关工作
传统方法:手工提取点云特征,存在很多局限性,如对于特定任务,不容易找到优质的特征,并且模型的泛化能力较差。
深度学习方法:1、将点云体素化,通过3D卷积处理,体素化会导致元素的稀疏(很多体素是空的),并且3D卷积计算量消耗大。2、将点云转换成2D数据,然后采用2D卷积以及相应的方法处理,这个方法在特定的任务上(分类、检索)取得了比较好的结果,但是对另一些任务(分割、形状补全)就不太适用。
网络结构
- 输入一个样本对应的点云数据,这里是
n*3也就是n个点,每个点有三个特征 - 输入数据经过一个T-Net进行输入空间的对齐,保证点云的变换不变性。相当于是做了一次变换,所以输入输出的shape是不变的
- 经过多个MLP进行特征提取,再次使用T-Net进行特征空间的对齐
- 对于每个特征维度使用max pool得到全局特征,也就是进行了特征聚合操作
- 对于分类问题,经过MLP直接输出k个类别的类别概率,对于分割问题,先进行全局信息与局部分析的融合,然后输出
n*m的矩阵,表示n个点对应m个分类类别的概率。

点云及点云的性质
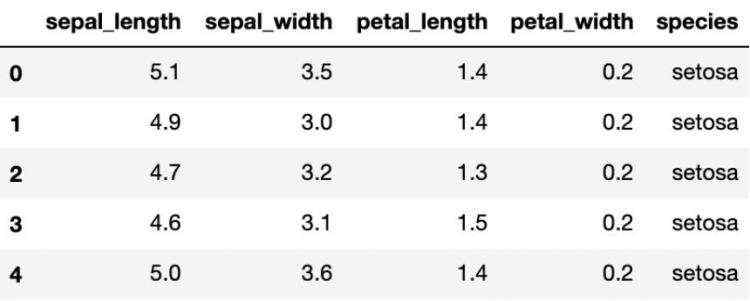
点云:点云就是一系列的点的集合,每个点可以包含若干个属性,最基本的就是空间坐标(x,y,z),当然也可以有一些其他的属性。第一张图是点云的原始数据,这里是包括了6个属性,前三个是坐标,后三个是其他属性;第二张图是这份点云数据的可视化。


点云的性质:
- 非结构化:点云是非结构的,所以无法直接使用卷积神经网络处理。
- 无序性:点云是无序的,假设我们的点云有N个点,这N个点的任意排序都能正常表示点云,这也要求我们的网络对于任意顺序的点的输入都有一个相同的结果。
- 变换不变性:对点云进行平移、旋转等变换,应该是不改变点云分类或者分割的结果的。
- 点的交互:点云中的点不是孤立的,他和他周围的点是一个局部,是存在联系的,所以这个联系,以及局部与局部之间的联系都是需要网络考虑的。
针对点云性质的处理
针对非结构化的特点:作者直接使用了MLP处理
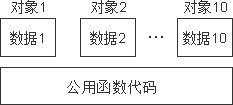
针对无序性的特点: 首先无序背景采用主流的方法会有什么问题呢?我们打个比方,有三个数据,每个数据都有三个特征,我们要将他们聚合成一个数据,一个简单的方法就是每个数据都取一部分,但是每个数据取多少是我们学习得到的,而这个数据是定死的,假如说第一个数据取20%,第二个数据取50%,第三个数据取30%,那么三种数据可以有6种排列方式,对应我们的聚合方法就会产生6种结果,这不是一个无序数据应该有的,也就是我们的聚合方式是存在问题的。无序背景下特征提取主流的解决方案有三种:1、排序;2、RNN处理;3、使用一个简单的对称函数。作者实验下来,第三种效果最好。主要解释下第三种,什么是对称函数。对称函数其实就是对于输入顺序无所谓的函数,比如max函数,min函数,sum函数之类的,如采用max函数,对于每一维度的特征,我们都取最大的一个值作为聚合数据的特征,无论输入数据的顺序怎么变换,都可以得到相同的结果。
针对变换不变性的特点:一个直观的想法就是在进行特征提取之前进行标准空间的对齐,这样的话,不管输入经过了怎样的变换,我们统一将它转换成标准的状态,然后再进行特征提取。作者这边还额外添加了一个特征空间的对齐操作,这两个对齐网络是额外训练的简单网络(T-Net)。
针对点交互的特点:作者这边采用的方式是全局信息与个体信息的融合,首先使用max pool得到全局的点云向量,然后将全局的点云向量与每个点的特征进行融合,接着使用一个MLP加深这种融合(减小语义沟壑),最后用融合之后的特征去做分割。但是,这个操作其实是因为分割任务的特殊性所以需要的,也就是说,从全局的角度来看,是没有将当前点和周围点做融合,没有利用到局部信息的。
简单实现
使用PointNet实现分类,参考代码:链接,conv1d的理解参考:链接
import paddle
import paddle.nn as nn
import paddle.nn.functional as F
class STN3d(nn.Layer):
def __init__(self,channel=3):
super(STN3d, self).__init__()
self.conv1 = nn.Conv1D(channel, 64, 1)
self.conv2 = nn.Conv1D(64, 128, 1)
self.conv3 = nn.Conv1D(128, 1024, 1)
self.fc1=nn.Linear(1024,512)
self.fc2=nn.Linear(512,256)
self.fc3=nn.Linear(256,9)
self.bn1 = nn.BatchNorm1D(64)
self.bn2 = nn.BatchNorm1D(128)
self.bn3 = nn.BatchNorm1D(1024)
self.bn4 = nn.BatchNorm1D(512)
self.bn5 = nn.BatchNorm1D(256)
self.relu=nn.ReLU()
def forward(self,x):
B, D, N = x.shape
x = self.relu(self.bn1(self.conv1(x)))
x = self.relu(self.bn2(self.conv2(x)))
x = self.relu(self.bn3(self.conv3(x)))
x = paddle.max(x, 2, keepdim=True)
x = paddle.flatten(x, 1)
x=self.relu(self.bn4(self.fc1(x)))
x=self.relu(self.bn5(self.fc2(x)))
x=self.fc3(x)
iden = paddle.to_tensor([1, 0, 0, 0, 1, 0, 0, 0, 1]).astype(paddle.float32).reshape([1,9]).expand([B,9])
x=x+iden
x=x.reshape([-1,3,3])
return x
class STNkd(nn.Layer):
def __init__(self, k=64):
super(STNkd, self).__init__()
self.conv1 = nn.Conv1D(k, 64, 1)
self.conv2 = nn.Conv1D(64, 128, 1)
self.conv3 = nn.Conv1D(128, 1024, 1)
self.fc1 = nn.Linear(1024, 512)
self.fc2 = nn.Linear(512, 256)
self.fc3 = nn.Linear(256, k*k)
self.bn1 = nn.BatchNorm1D(64)
self.bn2 = nn.BatchNorm1D(128)
self.bn3 = nn.BatchNorm1D(1024)
self.bn4 = nn.BatchNorm1D(512)
self.bn5 = nn.BatchNorm1D(256)
self.relu = nn.ReLU()
self.k=k
def forward(self, x):
B, D, N = x.shape
x = self.relu(self.bn1(self.conv1(x)))
x = self.relu(self.bn2(self.conv2(x)))
x = self.relu(self.bn3(self.conv3(x)))
x = paddle.max(x, 2, keepdim=True)
x = paddle.flatten(x, 1)
x = self.relu(self.bn4(self.fc1(x)))
x = self.relu(self.bn5(self.fc2(x)))
x = self.fc3(x)
iden = paddle.eye(self.k,self.k).astype(paddle.float32).reshape([1, self.k*self.k]).expand(
[B, self.k*self.k])
x = x + iden
x = x.reshape([-1, self.k,self.k])
return x
class PointNet(nn.Layer):
def __init__(self,channel=3,classes=3):
super(PointNet, self).__init__()
self.stn = STN3d(channel=channel)
self.fstn = STNkd(k=64)
self.conv1 = nn.Conv1D(channel,64,1)
self.conv2 = nn.Conv1D(64, 128, 1)
self.conv3 = nn.Conv1D(128, 1024, 1)
self.fc1 = nn.Linear(1024, 512)
self.fc2 = nn.Linear(512, 256)
self.fc3 = nn.Linear(256, classes)
self.bn1 = nn.BatchNorm1D(64)
self.bn2 = nn.BatchNorm1D(128)
self.bn3 = nn.BatchNorm1D(1024)
self.bn4 = nn.BatchNorm1D(512)
self.bn5 = nn.BatchNorm1D(256)
self.relu=nn.ReLU()
def forward(self,x):
B,D,N=x.shape
trans = self.stn(x)
x=paddle.transpose(x,[0,2,1])
x=paddle.matmul(x,trans)
x = paddle.transpose(x, [0,2, 1])
x=self.relu(self.bn1(self.conv1(x)))
trans_feat = self.fstn(x)
x = paddle.transpose(x, [0, 2, 1])
x = paddle.matmul(x, trans_feat)
x = paddle.transpose(x, [0, 2, 1])
x=self.relu(self.bn2(self.conv2(x)))
x=self.relu(self.bn3(self.conv3(x)))
x = paddle.max(x, 2, keepdim=True)
x=paddle.flatten(x,1)
x=self.relu(self.bn4(self.fc1(x)))
x=self.relu(self.bn5(self.fc2(x)))
x=self.fc3(x)
x=F.softmax(x,1)
return x
def main():
x = paddle.randn([1, 3, 100])
pointnet = PointNet(3,3)
print(pointnet(x))
if __name__ == '__main__':
main()





 京公网安备 11010802041100号
京公网安备 11010802041100号