作者:Ale__x小葡萄 | 来源:互联网 | 2023-10-13 13:42
1.在visualstudio编辑python程序,需要引用当前路径.
1.在visual studio编辑python程序,需要引用当前路径.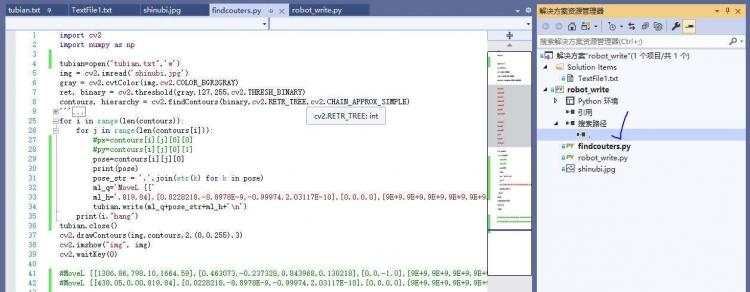
 
#visual studio要增加当前文件夹路径
import cv2
import numpy as np
tubian=open("tubian.txt",'w')#图片轮廓转换成的机器人程序MOVEL
img = cv2.imread('shinubi.jpg') #读取要加载的图片
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) #转换成灰度图
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)#图像上下限调节,127和255可更改
contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE) #提取轮廓
for i in range(len(contours)):#遍历轮廓条数
for j in range(len(contours[i])): #遍历单条轮廓点数
pose=contours[i][j][0]#取得NUmpy中的点
print(pose)
pose_str = ','.join(str(k) for k in pose)#转换为字符串
ml_q='MoveL [['#ABB工业机器人指令头部
ml_h=',819.84],[0.0228218,-8.8978E-9,-0.99974,2.03117E-10],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]], v1000, z50, tool0;'#ABB工业机器人指令尾部
tubian.write(ml_q+pose_str+ml_h+'\n')#写入文件方便复制
print(i,"hang")#在实际中应该增加抬笔,就是机器人向上偏移10mm指令
tubian.close()#关闭文件
cv2.drawContours(img,contours,2,(0,0,255),3) #绘制第二天边缘
cv2.imshow("img", img) #显示图片
cv2.waitKey(0) #等待键盘
#下面为机器人的下笔的第一个点,主要取其头部和尾部,其他点位更换该点的x,y获得
#一般机器人应该对纸张示教工件坐标系
#如果图片过大,可将pose的中之乘以相应系数
#MoveL [[1306.86,798.10,1664.59],[0.463073,-0.237328,0.843968,0.130218],[0,0,-1,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]], v1000, z50, tool0;
#MoveL [[438.05,0.00,819.84],[0.0228218,-8.8978E-9,-0.99974,2.03117E-10],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]], v1000, z50, tool0;
 
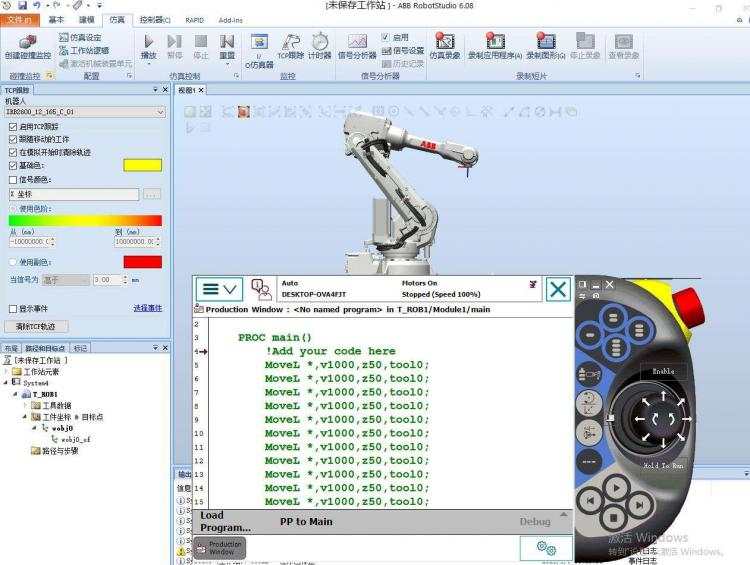
2.在robostudio中建立一个机器人,调整到合适姿态,从示教器中取得第一笔的姿态(整条指令方便python程序引用.)
大概生成了1400条程序,如果机器人运行报错,如(0,0)点位无法到达,请手动删除.
 
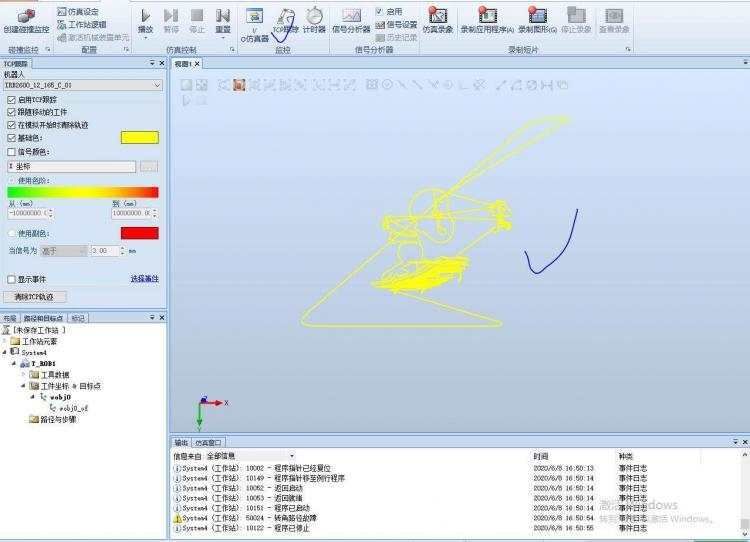
3.运行完成后,打开TCP跟踪,进行轨迹播放,对比原图,如下:

 










 京公网安备 11010802041100号
京公网安备 11010802041100号