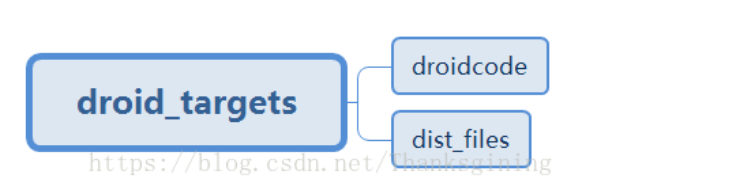
基于距离的分水岭分割流程
输入图像>灰度>二值>距离变换>寻找种子>生成Marker>分水岭变换>输出图像
import cv2 as cv
import numpy as np# 分水岭算法
def watershed_image():print(src.shape)blurred = cv.pyrMeanShiftFiltering(src, 10, 100) # 利用边缘滤波,去除噪点# gray\binary image 灰度二值图像gray = cv.cvtColor(blurred, cv.COLOR_BGR2GRAY)ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)cv.imshow("binary_image", binary)# morphology operation 形态学操作kernel = cv.getStructuringElement(cv.MORPH_RECT, (3, 3)) #结构元素mb = cv.morphologyEx(binary, cv.MORPH_OPEN, kernel, iterations=2) #连续两次开操作sure_bg = cv.dilate(mb, kernel, iterations=3)cv.imshow("mor_opt", sure_bg)# distance transform 对上面的mb进行距离变换dist = cv.distanceTransform(mb, cv.DIST_L2, 3)dist_output = cv.normalize(dist, 0, 1.0, cv.NORM_MINMAX)cv.imshow("distance", dist_output * 70)ret, surface = cv.threshold(dist, dist.max() * 0.6, 255, cv.THRESH_BINARY)cv.imshow("surface-bin", surface)surface_fg = np.uint8(surface)unknown = cv.subtract(sure_bg, surface_fg)ret, markers = cv.connectedComponents(surface_fg)print(ret)# watershed transfrom 分水岭变换markers += 1markers[unknown == 255] = 0markers = cv.watershed(src, markers=markers)src[markers == -1] = [0, 0, 255]cv.imshow("result", src)src = cv.imread('F:00.jpg')
#cv.namedWindow('input_image', cv.WINDOW_AUTOSIZE)
cv.imshow("0", src)
watershed_image()
cv.waitKey(0)
cv.destroyAllWindows()
输出结果:



 京公网安备 11010802041100号
京公网安备 11010802041100号