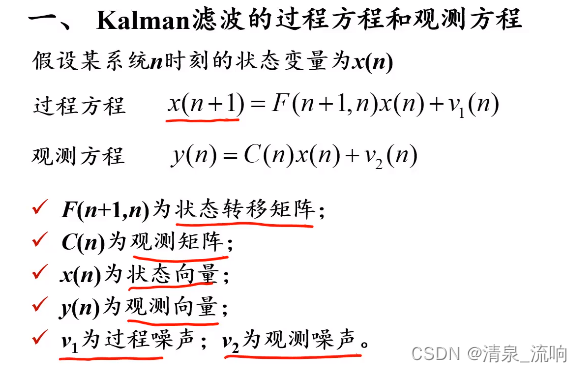
一、Kalman滤波的过程方程和观测方程

假设某系统n时刻的状态变量为x(n)
过程方程:x(n+1)=F(n+1,n)x(n)+v1(n)
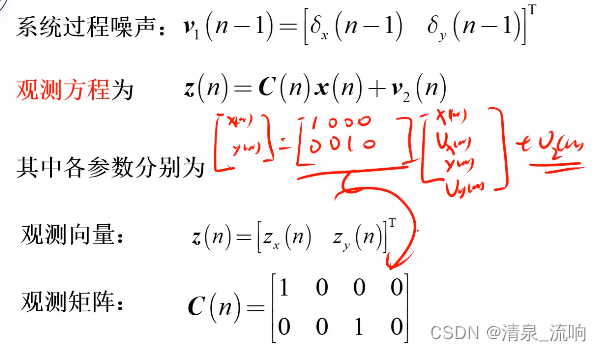
观测方程:y(n)=C(n)x(n)+v2(n)
F(n+1,n)为状态转移矩阵;
C(n)为观测矩阵;
x(n)为状态向量;
y(n)为观测向量;
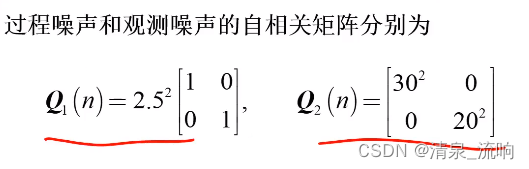
v1为过程噪声;v2为观测噪声。
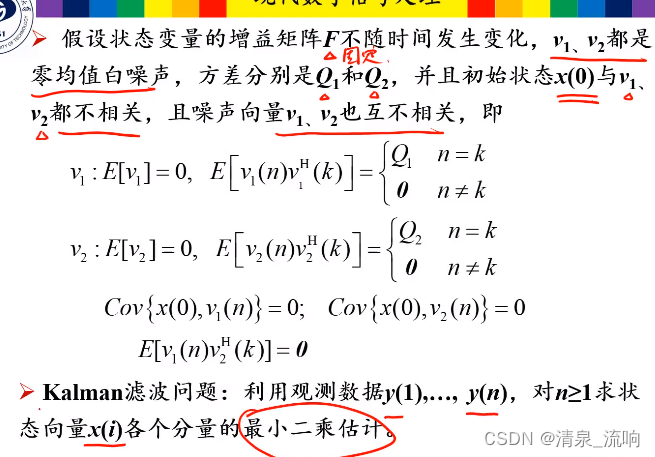
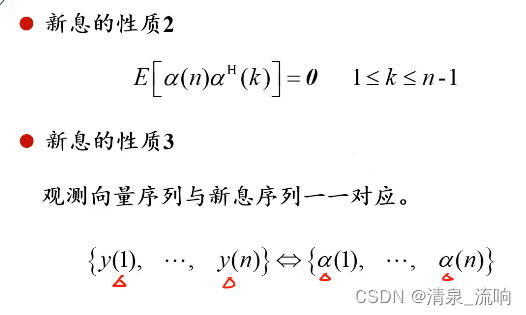
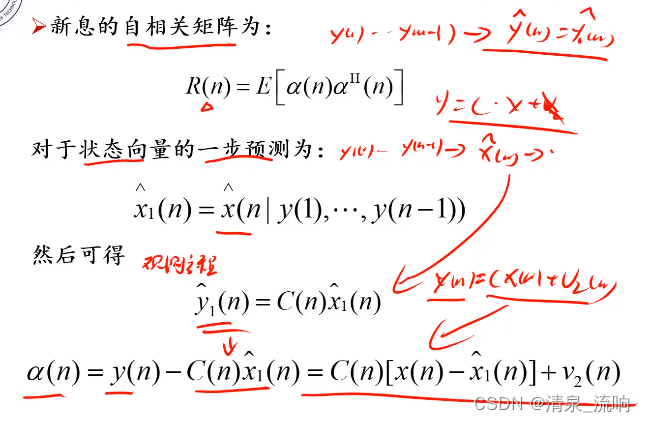
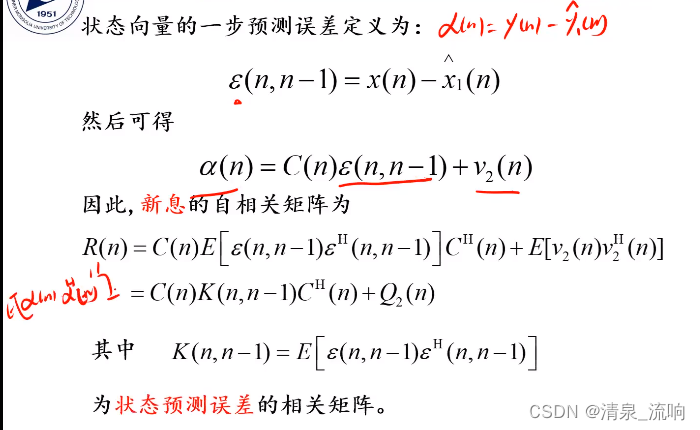
二、新息过程(新的信息)

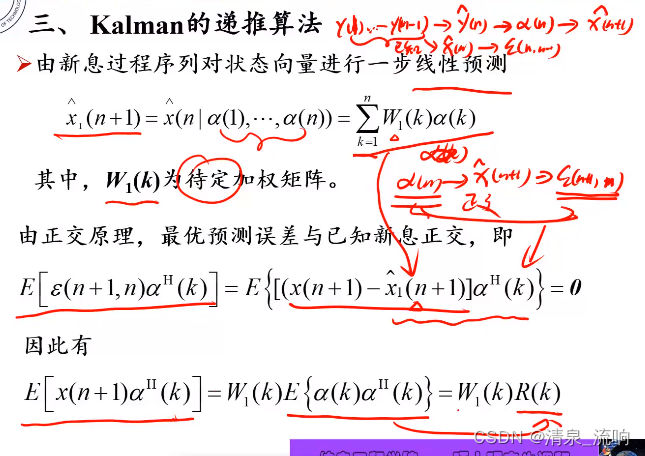
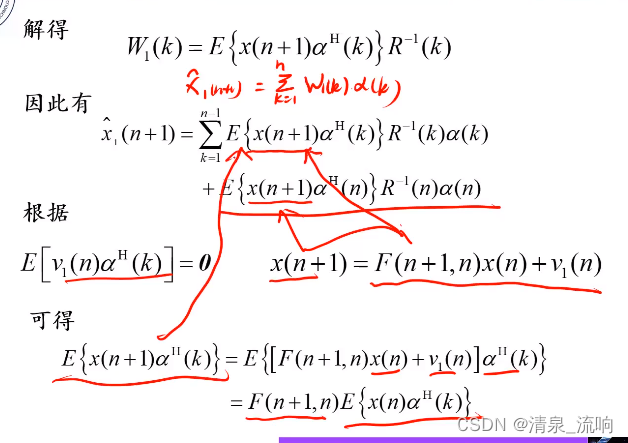
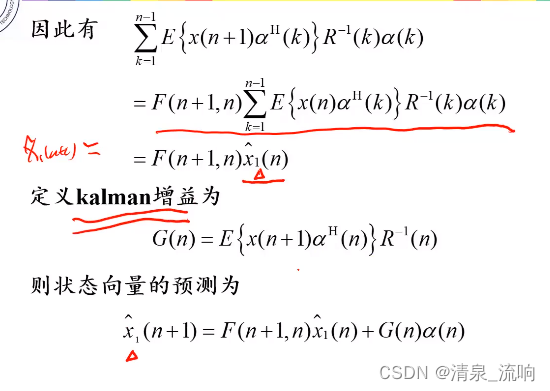
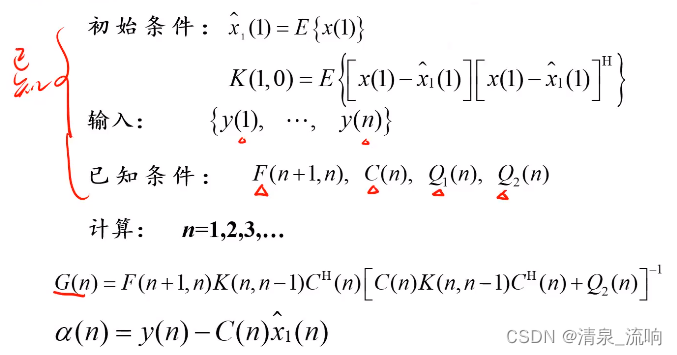
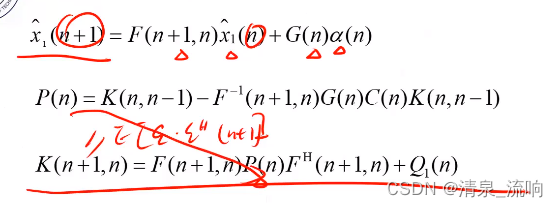
 三、Kalman的递推算法
三、Kalman的递推算法
Kalman滤波算法流程:
Kalman滤波的特点:
Kalman滤波采用物理意义较为直观的时间域描述方式;
采用递推算法,用前一个估计值和最近一个观察数据(它不需要全部过去的观察数据)来估计信号的当前值;
解是以估计值(常常是状态变量值)形式给出的,或者说其信号模型是从状态方程和量测方程得到的;
适用于多维和非平稳随机信号。
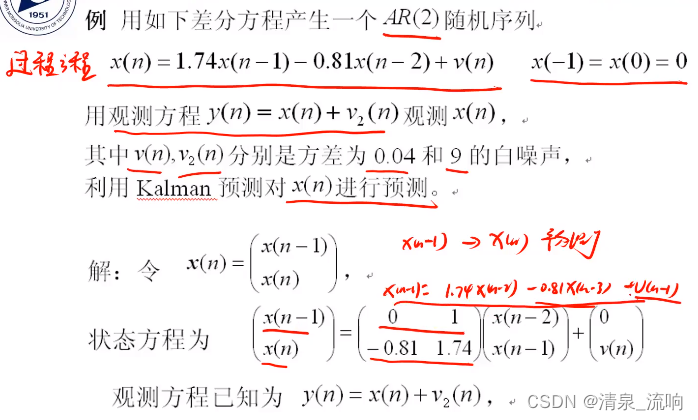
例:用如下差分方程产生一个AR(2)随机序列。
x(n)=1.74x(n-1)-0.81x(n-2)+v(n),x(-1)=x(0)=0
用观测方程y(n)=x(n)+v2(n)观测x(n),其中v(n),v2(n)分别是方差为0.04和9的白噪声,利用Kalman预测对x(n)进行预测。

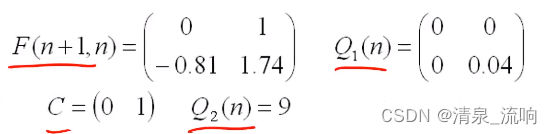
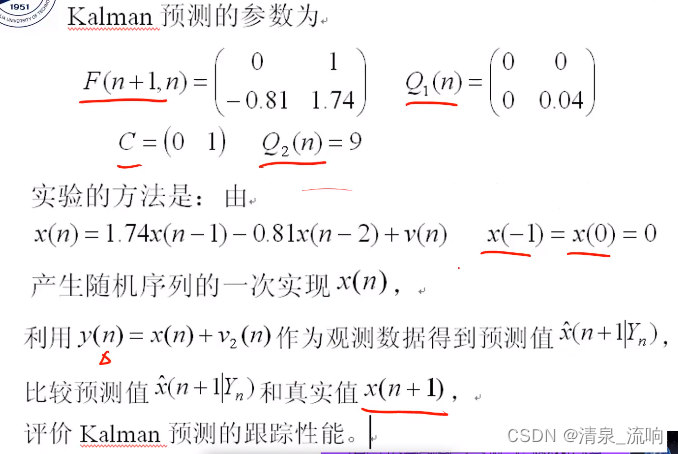
Kalman预测的参数为:
实验的方法是:由
x(n)=1.74x(n-1)-0.81x(n-2)+v(n), x(-1)=x(0)=0产生随机序列的一次实现x(n),
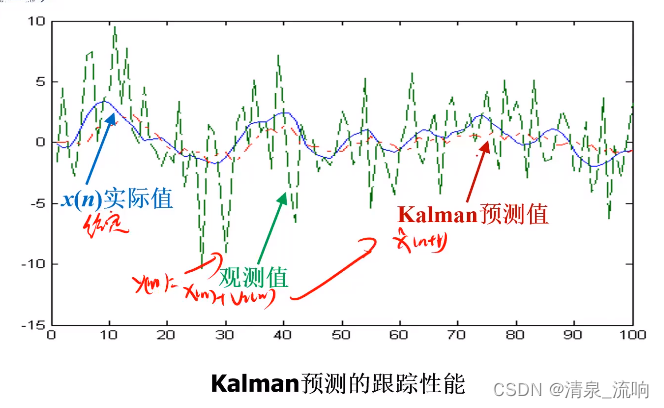
利用y(n)=x(n)+v2(n)作为观测数据得到预测值 ,比较预测值和真实值x(n+1),评价Kalman预测的跟踪性能。
,比较预测值和真实值x(n+1),评价Kalman预测的跟踪性能。
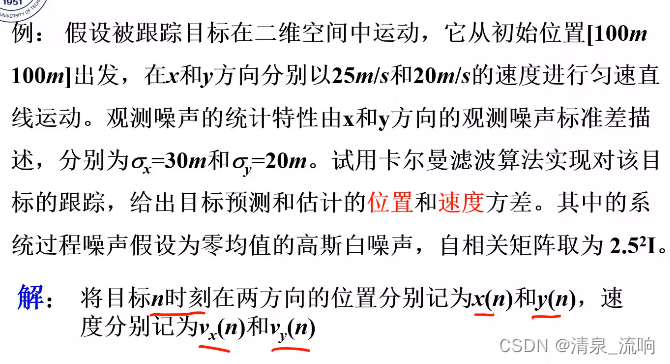
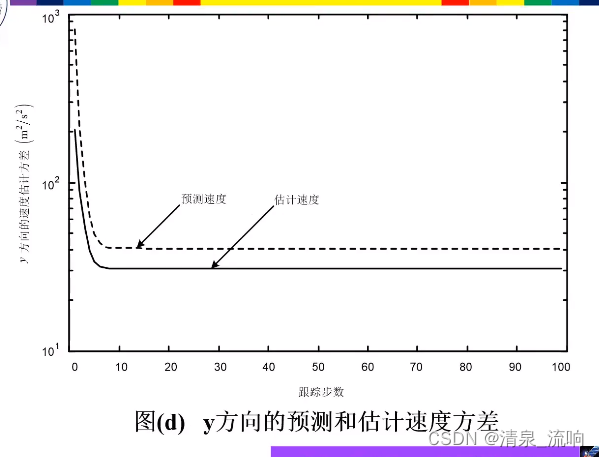
卡尔曼滤波在雷达目标跟踪中的应用
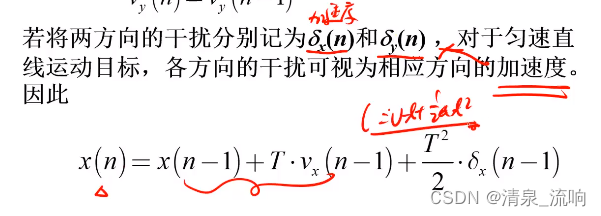
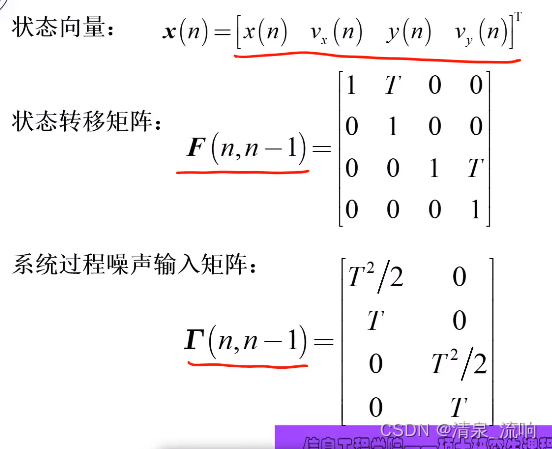
当卡尔曼滤波应用于目标跟踪时,用系统状态方程来描述目标的运动特性:
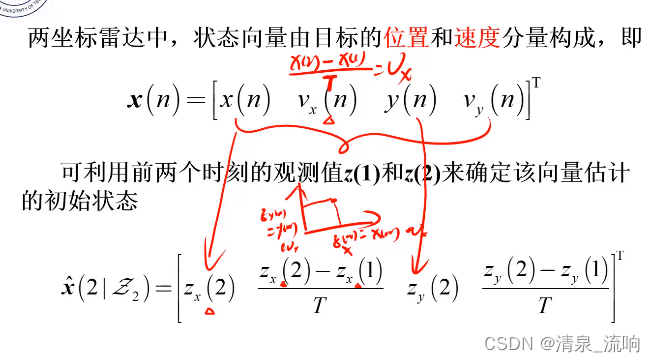
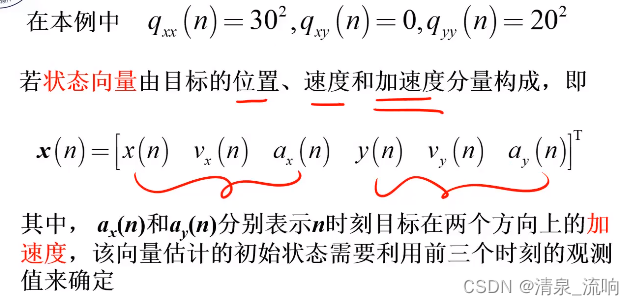
状态向量通常由目标的位置、速度和(或)加速度参量构成;
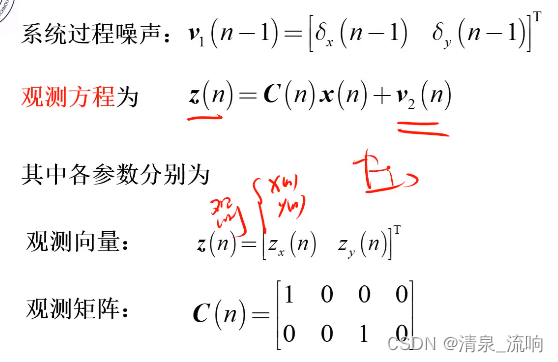
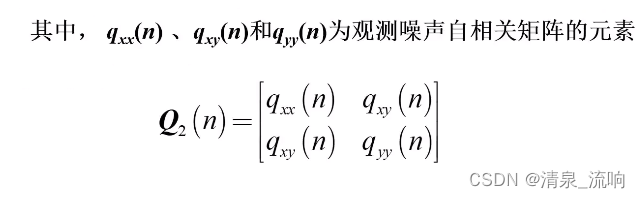
观测方程中的观测向量则由雷达测得的目标运动参量构成。
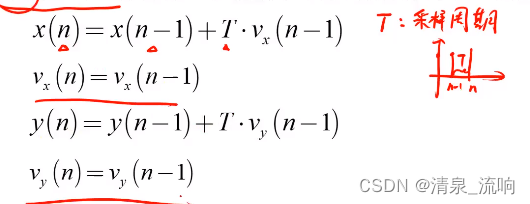
对于匀速直线运动目标,在没有任何扰动的情况下,满足
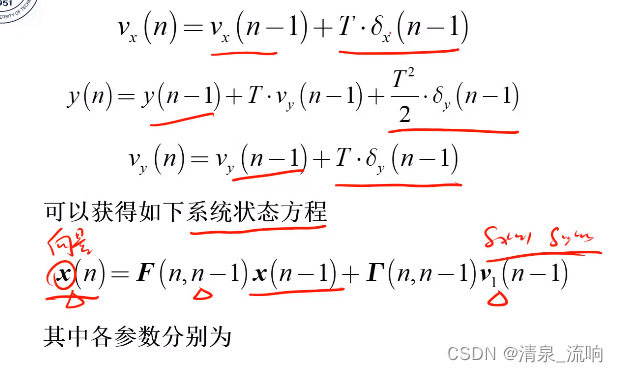
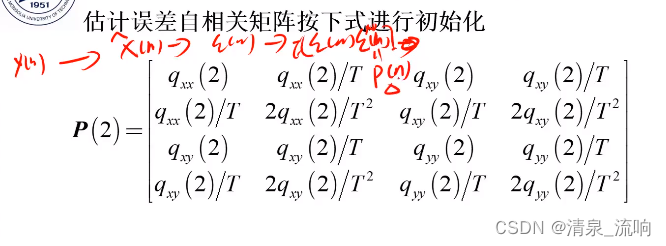
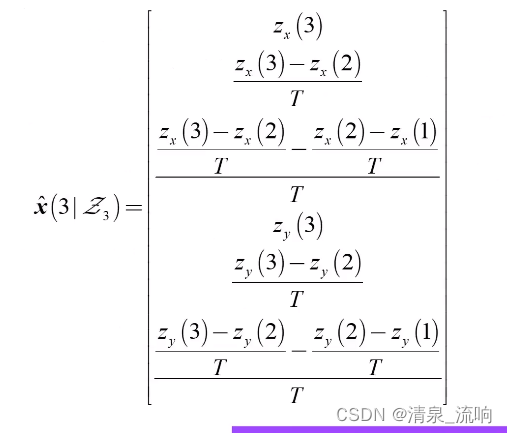
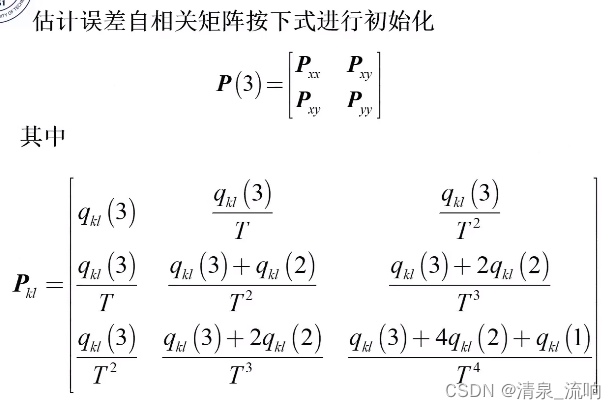
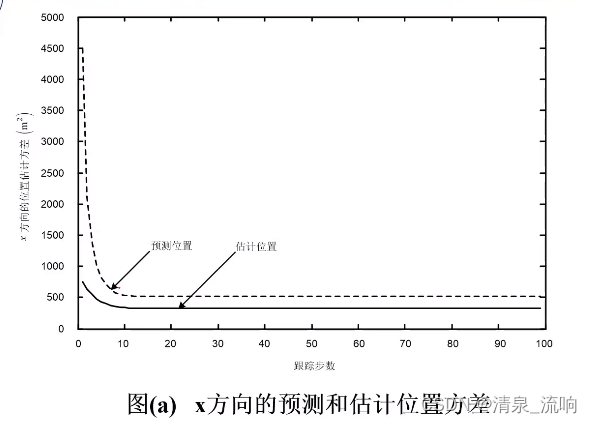
在给定系统状态方程和观测方程下,为进行卡尔曼滤波,需给出状态估计和估计误差自相关矩阵的初始值,下面给出目标跟踪时,工程上常用的状态向量估计初始化方法。
参考视频:
https://www.bilibili.com/video/BV1wS4y1D7ng?p=9&vd_source=77c874a500ef21df351103560dada737







 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有 