作者:手机用户2502884923 | 来源:互联网 | 2023-08-21 18:37
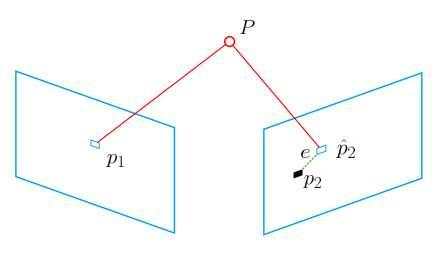
篇首语:本文由编程笔记#小编为大家整理,主要介绍了双视图下BundleAdjustment重投影误差的雅可比矩阵相关的知识,希望对你有一定的参考价值。(一)建立问题模型
篇首语:本文由编程笔记#小编为大家整理,主要介绍了双视图下Bundle Adjustment重投影误差的雅可比矩阵相关的知识,希望对你有一定的参考价值。
(一)建立问题模型
以第一帧的相机坐标系为世界坐标系,世界坐标系中存在n个空间点P,其在第二帧的投影点为p,现在希望求出相机的位姿R,t
a
a



 京公网安备 11010802041100号
京公网安备 11010802041100号