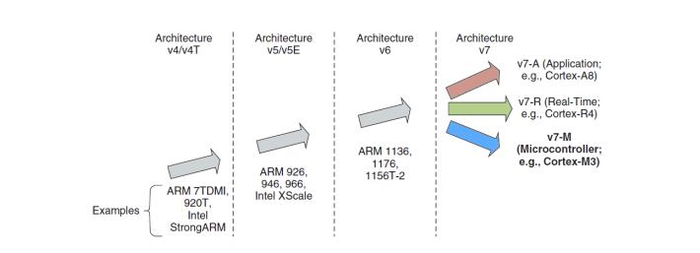
本文是基于u-boot-04.04.00.01进行分析,硬件平台基于DM8168 (Cortex-A8 + DSP + M3(视频处理子系统))
一. U-Boot 目录结构

本目录存放与已有开发板相关的文件。每种开发板有一个子目录,子目录仅存放与开发板相关的c文件和配置文件,不包含开发板CPU架构通用的实现文件。
每个目录下有如下文件(以/board/ti/ti8168_dvr/为例):
Makefile
config.mk
2.common
实现u-boot命令行下支持的命令,每一条命令对应一个文件。例如bootm命令对应的是cmd_bootm.c。
3.arch
与处理器体系架构相关目录,每一款体系架构的处理器均在一个子目录下,每个子目录下面包含系列此体系架构处理器, 下子目录基于某种系列处理器的不同的解决方案。
每个目录下有如下文件(以arch/arm/cpu/arm_cortexa8/为例):
Makefile
config.mk
cpu.c 和处理器相关的代码
mx51/
oamp3/
s5pc1xx/
start.S
ti81xx/
u-boot.lds
4.disk
对磁盘的支持。
5.doc
文档目录。
6.drivers
设备驱动程序目录。比如串口、USB、mmc等。
7.fs
支持的文件系统。u-boot支持cramfs、ext2、fat、fdos、jffs2、reiserfs、ubifs、yaffs2文件系统。
8.include
使用的头文件均在改目录下,还有对各种硬件平台支持的汇编文件、系统配置文件和文件系统支持的文件。
该目录下configs目录有与开发板相关的配置文件。例如smdkv210single.h。
该目录下asm目录有与cpu体系结构相关的头文件,例如asm-arm目录下有arch-s5pc11x目录。
9.lib
所有处理器通用的库文件。
10.net
与网络协议栈相关的代码,bootp协议、tftp协议、rarp协议和nfs文件系统等实现。
11.tools
生成u-boot工具,例如mkimage。
12.api
处理器或者开发板为外部应用程序提供独立的API。
13.example
一些独立的应用程序示范代码。
14.其他 etc。
二. U-boot 编译与链接
参考原文:http://www.cnblogs.com/cslunatic/admin/EditPosts.aspx?postid=2982302
1. 对于本开发板,编译U-Boot需要执行如下的命令:
$ export PATH=/opt/armgcc/bin:$PATH
$ make distclean
$ make ti8168_dvr_config
$ make u-boot.ti
使用上面的命令编译U-Boot,编译生成的所有文件都保存在源代码目录中。为了保持源代码目录的干净,可以使用如下命令将编译生成的文件输出到一个外部目录,而不是在源代码目录中,下面的2种方法都将编译生成的文件输出到 /tmp/build目录:
$ export BUILD_DIR=/tmp/build
$ make ti8168_dvr_config
$ make u-boot.ti
或
$ make O=/tmp/build ti8168_dvr_config (注意是字母O,而不是数字0)
$ make u-boot.ti
2. make
(1)定义主机系统架构
HOSTARCH := $(shell uname -m | \
sed -e s/i.86/i386/ \
......
“sed –e”表示后面跟的是一串命令脚本,而表达式“s/abc/def/”表示要从标准输入中,查找到内容为“abc”的,然后替换成“def”。其中“abc”表达式用可以使用“.”作为通配符。
命令“uname –m”将输出主机CPU的体系架构类型。本人使用Intel 奔腾系列的CPU,因此“uname –m”输出“i686”。 “i686”可以匹配命令“sed -e s/i.86/i386/”中的“i.86”,因此在作者的机器上执行Makefile,HOSTARCH将被设置成“i386” 。
(2)定义主机操作系统类型
HOSTOS := $(shell uname -s | tr '[:upper:]' '[:lower:]' | \
sed -e 's/\(cygwin\).*/cygwin/')
“uname –s”输出主机内核名字,本人使用Linux发行版Ubuntu10.04,因此“uname –s”结果是“Linux”。“tr '[:upper:]' '[:lower:]'”作用是将标准输入中的所有大写字母转换为响应的小写字母。因此执行结果是将HOSTOS 设置为“linux”。
(3)定义执行shell脚本的shell
# Set shell to bash if possible, otherwise fall back to sh
SHELL := $(shell if [ -x "$$BASH" ]; then echo $$BASH;
else if [ -x /bin/bash ]; then echo /bin/bash; \
else echo sh; fi; fi)
"$$BASH"的作用实质上是生成了字符串“$BASH”(前一个$号的作用是指明第二个$是普通的字符)。若执行当前Makefile的shell中定义了“$BASH”环境变量,且文件“$BASH”是可执行文件,则SHELL的值为“$BASH”。否则,若“/bin/bash”是可执行文件,则SHELL值为“/bin/bash”。若以上两条都不成立,则将“sh”赋值给SHELL变量。
由于本人的机器安装了bash shell,且shell默认环境变量中定义了“$BASH”,因此SHELL 被设置为$BASH 。
(4)设定编译输出目录
ifdef O
ifeq ("$(origin O)", "command line")
BUILD_DIR := $(O)
endif
endif
函数$( origin, variable) 输出的结果是一个字符串,输出结果由变量variable定义的方式决定,若variable在命令行中定义过,则origin函数返回值为"command line"。假若在命令行中执行了“export BUILD_DIR=/tmp/build”的命令,则“$(origin O)”值为“command line”,而BUILD_DIR被设置为“/tmp/build”。
ifneq ($(BUILD_DIR),)
saved-output := $(BUILD_DIR)
# Attempt to create a output directory.
$(shell [ -d ${BUILD_DIR} ] || mkdir -p ${BUILD_DIR})
若${BUILD_DIR}表示的目录没有定义,则创建该目录。
# Verify if it was successful.
BUILD_DIR := $(shell cd $(BUILD_DIR) && /bin/pwd)
$(if $(BUILD_DIR),,$(error output directory "$(saved-output)" does not exist))
endif # ifneq ($(BUILD_DIR),)
若$(BUILD_DIR)为空,则将其赋值为当前目录路径(源代码目录)。并检查$(BUILD_DIR)目录是否存在。
#OBJTREE和LNDIR为存放生成文件的目录,TOPDIR与SRCTREE为源码所在目录
OBJTREE := $(if $(BUILD_DIR),$(BUILD_DIR),$(CURDIR))
SRCTREE := $(CURDIR)
TOPDIR := $(SRCTREE)
LNDIR := $(OBJTREE)
… …
#定义变量MKCONFIG:这个变量指向一个脚本,即顶层目录的mkconfig。
MKCONFIG := $(SRCTREE)/mkconfig
… …
ifneq ($(OBJTREE),$(SRCTREE))
obj := $(OBJTREE)/
src := $(SRCTREE)/
else
obj :=
src :=
endif
CURDIR变量指示Make当前的工作目录,由于当前Make在U-Boot顶层目录执行Makefile,因此CURDIR此时就是U-Boot顶层目录。
执行完上面的代码后, SRCTREE,src变量就是U-Boot代码顶层目录,而OBJTREE,obj变量就是输出目录,若没有定义BUILD_DIR环境变量,则SRCTREE,src变量与OBJTREE,obj变量都是U-Boot源代码目录。而MKCONFIG则表示U-Boot根目录下的mkconfig脚本。
(5) make ti8168_dvr_config命令执行过程
ti8168_dvr_config \
ti8168_dvr_min_sd: unconfig
@mkdir -p $(obj)include
@echo "#define CONFIG_TI81XX" >>$(obj)include/config.h
@echo "#define CONFIG_TI816X" >>$(obj)include/config.h
@if [ "$(findstring _min_sd,$@)" ] ; then \
echo "#define CONFIG_SYS_NO_FLASH" >>$(obj)include/config.h ; \
echo "#define CONFIG_MLO_BOOT" >>$(obj)include/config.h ; \
echo "Setting up TI8168_dvr SD boot minimal build..." ; \
else \
echo "#define CONFIG_SYS_NO_FLASH" >>$(obj)include/config.h ; \
echo "#define CONFIG_NAND_ENV" >>$(obj)include/config.h ; \
echo "Setting up TI8168_dvr default build with NAND..." ; \
fi;
@$(MKCONFIG) -a ti8168_dvr arm arm_cortexa8 ti8168_dvr ti ti81xx
其中的依赖“unconfig”定义如下:
unconfig:
@rm -f $(obj)include/config.h $(obj)include/config.mk \
$(obj)board/*/config.tmp $(obj)board/*/*/config.tmp \
$(obj)include/autoconf.mk $(obj)include/autoconf.mk.dep
其中“@”的作用是执行该命令时不在shell显示。“obj”变量就是编译输出的目录,因此“unconfig”的作用就是清除上次执行make *_config命令生成的配置文件(如include/config.h,include/config.mk等)。
$(MKCONFIG)在上面指定为“$(SRCTREE)/mkconfig”。即将 ./mkconfig -a ti8168_dvr arm arm_cortexa8 ti8168_dvr ti ti81xx作为参数传递给当前目录下的mkconfig脚本执行。
$(@:_config=) arm arm920t mini2440 samsung s3c24x0”
$(@:_config=)为将传进来的所有参数中的_config替换为空(其中“@”指规则的目标文件名,在这里就是“mini2440_config ”。$(text:patternA=patternB),这样的语法表示把text变量每一个元素中结尾的patternA的文本替换为patternB,然后输出) 。因此$(@:_config=)的作用就是将mini2440_config中的_config去掉,得到mini2440。:
./mkconfig mini2440 arm arm920t mini2440 samsung s3c24x0
即将“mini2440 arm arm920t mini2440 samsung s3c24x0”作为参数传递给当前目录下的mkconfig脚本执行。
(6) 在mkconfig脚本中给出了mkconfig的用法:
# Parameters: Target Architecture CPU Board [VENDOR] [SOC]
1> 因此传递给mkconfig的参数的意义分别是:
ti8168_dvr:Target(目标板型号)
arm:Architecture (目标板的CPU架构)
arm_cortexa8:CPU (具体使用的CPU型号)
ti8168_dvr:Board
ti:VENDOR(生产厂家名)
ti81xx:SOC
APPEND=no # no表示创建新的配置文件,yes表示追加到配置文件中
BOARD_NAME="" # Name to print in make output
TARGETS=""
while [ $# -gt 0 ] ; do
case "$1" in
--) shift ; break ;;
-a) shift ; APPEND=yes ;;
-n) shift ; BOARD_NAME="${1%%_config}" ; shift ;;
-t) shift ; TARGETS="`echo $1 | sed 's:_: :g'` ${TARGETS}" ; shift ;;
*) break ;;
esac
done
["${BOARD_NAME}"] || BOARD_NAME="$1"
环境变量$#表示传递给脚本的参数个数,这里的命令有6个参数,因此$#是6 。shift的作用是使$1=$2,$2=$3,$3=$4….,而原来的$1将丢失。因此while循环的作用是,依次处理传递给mkconfig脚本的选项。由于我们传递给mkconfig任“-a”选项,因此while循环中的代码起作用, APPEND=yes。
最后将BOARD_NAME的值设置为$1的值,在这里就是“ti8168_dvr”。
2> 检查参数合法性
[ $# -lt 4 ] && exit 1
[ $# -gt 6 ] && exit 1
if [ "${ARCH}" -a "${ARCH}" != "$2" ]; then
echo "Failed: \$ARCH=${ARCH}, should be '$2' for ${BOARD_NAME}" 1>&2
exit 1
fi
上面代码的作用是检查参数个数和参数是否正确,参数个数少于4个或多于6个都被认为是错误的。-lt 表示小于 -gt 表示大于
3> 创建到目标板相关的目录的链接
#
# Create link to architecture specific headers
#
if [ "$SRCTREE" != "$OBJTREE" ] ; then #若编译目标输出到外部目录,则下面的代码有效
mkdir -p ${OBJTREE}/include
mkdir -p ${OBJTREE}/include2
cd ${OBJTREE}/include2
rm -f asm
ln -s ${SRCTREE}/include/asm-$2 asm
LNPREFIX="http://www.cnblogs.com/include2/asm/"
cd ../include
rm -rf asm-$2
rm -f asm
mkdir asm-$2
ln -s asm-$2 asm
else
cd ./include
rm -f asm
ln -s asm-$2 asm
fi
若将目标文件设定为输出到源文件所在目录,则以上代码在include目录下建立了到asm-arm目录的符号链接asm。其中的ln -s asm-$2 asm即ln -s asm-arm asm。
rm -f asm-$2/arch
if [ -z "$6" -o "$6" = "NULL" ] ; then
ln -s ${LNPREFIX}arch-$3 asm-$2/arch
else
ln -s ${LNPREFIX}arch-$6 asm-$2/arch
fi
建立符号链接include/asm-arm/arch ,若$6(SOC)为空,则使其链接到include/asm-arm/arch-arm_cortexa8目录,否则就使其链接到include/asm-arm/arch-ti81xx目录即ln -s arch-ti81xx asm-arm/arch。(事实上include/asm-arm/arch-arm_cortexa8并不存在,因此$6是不能为空的,否则会编译失败)
if [ "$2" = "arm" ] ; then
rm -f asm-$2/proc
ln -s ${LNPREFIX}proc-armv asm-$2/proc
fi
若目标板是arm架构,则上面的代码将建立符号连接include/asm-arm/proc,使其链接到目录proc-armv目录即ln -s proc-armv asm-arm/proc。
建立以上的链接的好处:编译U-Boot时直接进入链接文件指向的目录进行编译,而不必根据不同开发板来选择不同目录。
4> 构建include/config.mk文件
#
# Create include file for Make
#
echo "ARCH = $2" > config.mk
echo "CPU = $3" >> config.mk
echo "BOARD = $4" >> config.mk
[ "$5" ] && [ "$5" != "NULL" ] && echo "VENDOR = $5" >> config.mk
[ "$6" ] && [ "$6" != "NULL" ] && echo "SOC = $6" >> config.mk
上面代码将会把如下内容写入文件inlcude/config.mk文件:
ARCH = arm
CPU = arm_cortexa8
BOARD = ti8168_dv
VENDOR = ti
SOC = ti81xx
5> 指定开发板代码所在目录
# Assign board directory to BOARDIR variable
if [ -z "$5" -o "$5" = "NULL" ] ; then
BOARDDIR=$4
else
BOARDDIR=$5/$4
fi
以上代码指定board目录下的一个目录为当前开发板专有代码的目录。若$5(VENDOR)为空则BOARDDIR设置为$4(BOARD),否则设置为$5/$4(VENDOR/BOARD)。在这里由于$5不为空,因此BOARDDIR被设置为ti/ti8168_dvr。
6> 构建include/config.h文件
#
# Create board specific header file
#
if [ "$APPEND" = "yes" ] # Append to existing config file
then
echo >> config.h //追加尾
else
> config.h # Create new config file
fi
echo "/* Automatically generated - do not edit */" >>config.h
for i in ${TARGETS} ; do
echo "#define CONFIG_MK_${i} 1" >>config.h ;
done
cat <
#define CONFIG_BOARDDIR board/$BOARDDIR
#include
#include
#include
EOF #EOF本意是 End Of File&#xff0c;表明到了文件末尾
exit 0
这里的“cat <
若APPEND为no&#xff0c;则创建新的include/config.h文件。若APPEND为yes&#xff0c;则将新的配置内容追加到include/config.h文件后面。由于APPEND的值保持“no”&#xff0c;因此config.h被创建了&#xff0c;并添加了如下的内容&#xff1a;
/* Automatically generated - do not edit */
#define CONFIG_BOARDDIR board/ti/ti8168_dvr
#include
#include
#include
下面总结命令make ti8168_dvr_config执行的结果&#xff08;仅针对编译目标输出到源代码目录的情况&#xff09;&#xff1a;
1&#xff09;创建到目标板相关的文件的链接
ln -s asm-arm asm
ln -s arch-ti81xx asm-arm/arch
ln -s proc-armv asm-arm/proc
2) 创建include/config.mk文件&#xff0c;内容如下所示&#xff1a;
ARCH &#61; arm
CPU &#61; arm_cortexa8
BOARD &#61; ti8168_dvr
VENDOR &#61; ti
SOC &#61; ti81xx
3&#xff09;创建与目标板相关的文件include/config.h&#xff0c;如下所示&#xff1a;
/* Automatically generated - do not edit */
#define CONFIG_BOARDDIR board/ti/ti8168_dvr
#include
#include
#include
3. make u-boot.ti命令执行过程
若没有执行过“make
System not configured - see README
U-Boot是如何知道用户没有执行过“make
ifeq ($(obj)include/config.mk,$(wildcard $(obj)include/config.mk)) # config.mk存在
all:
sinclude $(obj)include/autoconf.mk.dep
sinclude $(obj)include/autoconf.mk
… …
else # config.mk不存在
… …
&#64;echo "System not configured - see README" >&2
&#64; exit 1
… …
endif # config.mk
若include/config.mk 文件存在&#xff0c;则$(wildcard $(obj)include/config.mk) 命令执行的结果是“$(obj)include/config.mk”展开的字符串&#xff0c;否则结果为空。由于include/config.mk是“make
下面再来分析“make u-boot.ti”命令正常执行的过程&#xff0c;在Makefile中有如下代码&#xff1a;
&#xff08;1&#xff09;include/autoconf.mk生成过程
all:
sinclude $(obj)include/autoconf.mk.dep
sinclude $(obj)include/autoconf.mk
include/autoconf.mk文件中是与开发板相关的一些宏定义&#xff0c;在Makefile执行过程中需要根据某些宏来确定执行哪些操作。下面简要分析include/autoconf.mk生成的过程&#xff0c;include/autoconf.mk生成的规则如下&#xff1a;
$(obj)include/autoconf.mk: $(obj)include/config.h
&#64;$(XECHO) Generating $&#64; ; \
set -e ; \
: Extract the config macros ; \
$(CPP) $(CFLAGS) -DDO_DEPS_ONLY -dM include/common.h | \
sed -n -f tools/scripts/define2mk.sed > $&#64;.tmp && \
mv $&#64;.tmp $&#64;
include/autoconf.mk依赖于make
编译选项“-dM”的作用是输出include/common.h中定义的所有宏。根据上面的规则&#xff0c;编译器提取include/common.h中定义的宏&#xff0c;然后输出给tools/scripts/define2mk.sed脚本处理&#xff0c;处理的结果就是include/autoconf.mk文件。其中tools/scripts/define2mk.sed&#xff0c;脚本的主要完成了在include/common.h中查找和处理以“CONFIG_”开头的宏定义的功能。
include/common.h文件包含了include/config.h文件&#xff0c;而include/config.h文件又包含了config_defaults.h&#xff0c;configs//ti8168_dvr.h&#xff0c;asm/config.h文件。因此include/autoconf.mk实质上就是config_defaults.h&#xff0c;configs//ti8168_dvr.h&#xff0c;asm/config.h三个文件中“CONFIG_”开头的有效的宏定义的集合。
下面接着分析Makefile的执行。
# load ARCH, BOARD, and CPU configuration
include $(obj)include/config.mk
export ARCH CPU BOARD VENDOR SOC
将make ti8168_dvr_config命令生成的include/config.mk包含进来。
# 若主机架构与开发板结构相同&#xff0c;就使用主机的编译器&#xff0c;而不是交叉编译器
ifeq ($(HOSTARCH),$(ARCH))
CROSS_COMPILE ?&#61;
endif
若主机与目标机器体系架构相同&#xff0c;则使用gcc编译器而不是交叉编译器。
# load other configuration
include $(TOPDIR)/config.mk
最后将U-Boot顶层目录下的config.mk文件包含进来&#xff0c;该文件包含了对编译的一些设置。下面对U-Boot顶层目录下的config.mk文件进行分析&#xff1a;
&#xff08;2&#xff09;config.mk文件执行过程
1> 设置obj与src
在U-Boot顶层目录下的config.mk文件中有如下代码&#xff1a;
ifneq ($(OBJTREE),$(SRCTREE))
ifeq ($(CURDIR),$(SRCTREE))
dir :&#61;
else
dir :&#61; $(subst $(SRCTREE)/,,$(CURDIR))
endif
obj :&#61; $(if $(dir),$(OBJTREE)/$(dir)/,$(OBJTREE)/)
src :&#61; $(if $(dir),$(SRCTREE)/$(dir)/,$(SRCTREE)/)
$(shell mkdir -p $(obj))
else
obj :&#61;
src :&#61;
endif
由于目标输出到源代码目录下&#xff0c;因此执行完上面的代码后&#xff0c;src和obj都是空。
2> 设置编译选项
PLATFORM_RELFLAGS &#61;
PLATFORM_CPPFLAGS &#61; #编译选项
PLATFORM_LDFLAGS &#61; #连接选项
用这3个变量表示交叉编译器的编译选项&#xff0c;在后面Make会检查交叉编译器支持的编译选项&#xff0c;然后将适当的选项添加到这3个变量中。
#
# Option checker (courtesy linux kernel) to ensure
# only supported compiler options are used
#
cc-option &#61; $(shell if $(CC) $(CFLAGS) $(1) -S -o /dev/null -xc /dev/null \
> /dev/null 2>&1; then echo "$(1)"; else echo "$(2)"; fi ;)
变量CC和CFLAGS在后面的代码定义为延时变量&#xff0c;其中的CC即arm-linux-gcc。函数cc-option用于检查编译器CC是否支持某选项。将2个选项作为参数传递给cc-option函数&#xff0c;该函数调用CC编译器检查参数1是否支持&#xff0c;若支持则函数返回参数1&#xff0c;否则返回参数2 &#xff08;因此CC编译器必须支持参数1或参数2&#xff0c;若两个都不支持则会编译出错&#xff09;。可以像下面这样调用cc-option函数&#xff0c;并将支持的选项添加到FLAGS中&#xff1a;FLAGS &#43;&#61;$(call cc-option,option1,option2)
3> 指定交叉编译工具
#
# Include the make variables (CC, etc...)
#
AS &#61; $(CROSS_COMPILE)as
LD &#61; $(CROSS_COMPILE)ld
CC &#61; $(CROSS_COMPILE)gcc
CPP &#61; $(CC) -E
AR &#61; $(CROSS_COMPILE)ar
NM &#61; $(CROSS_COMPILE)nm
LDR &#61; $(CROSS_COMPILE)ldr
STRIP &#61; $(CROSS_COMPILE)strip
OBJCOPY &#61; $(CROSS_COMPILE)objcopy
OBJDUMP &#61; $(CROSS_COMPILE)objdump
RANLIB &#61; $(CROSS_COMPILE)RANLIB
对于arm开发板&#xff0c;其中的CROSS_COMPILE在lib_arm/config.mk文件中定义&#xff1a;
CROSS_COMPILE ?&#61; arm-linux-
因此以上代码指定了使用前缀为“arm-linux-”的编译工具&#xff0c;即arm-linux-gcc&#xff0c;arm-linux-ld等等。
4> 包含与开发板相关的配置文件
# Load generated board configuration
sinclude $(OBJTREE)/include/autoconf.mk
ifdef ARCH
sinclude $(TOPDIR)/lib_$(ARCH)/config.mk # include architecture dependend rules
endif
$(ARCH)的值是“arm”&#xff0c;因此将“lib_arm/config.mk”包含进来。lib_arm/config.mk脚本指定了交叉编译器&#xff0c;添加了一些跟CPU架构相关的编译选项&#xff0c;最后还指定了cpu/arm_cortexa8/u-boot.lds为U-Boot的连接脚本。
ifdef CPU
sinclude $(TOPDIR)/cpu/$(CPU)/config.mk # include CPU specific rules
endif
$(CPU)的值是“arm920t”&#xff0c;因此将“cpu/arm_cortexa8/config.mk”包含进来。这个脚本主要设定了跟arm_cortexa8处理器相关的编译选项。
ifdef SOC
sinclude $(TOPDIR)/cpu/$(CPU)/$(SOC)/config.mk # include SoC specific rules
endif
$(SOC)的值是s3c24x0&#xff0c;因此Make程序尝试将cpu/arm920t/ti81xx/config.mk包含进来&#xff0c;而这个文件并不存在&#xff0c;但是由于用的是“sinclude”命令&#xff0c;所以并不会报错。
ifdef VENDOR
BOARDDIR &#61; $(VENDOR)/$(BOARD)
else
BOARDDIR &#61; $(BOARD)
endif
$(BOARD)的值是ti8168_dvr&#xff0c;VENDOR的值是ti&#xff0c;因此BOARDDIR的值是ti/ti8168_dvr, BOARDDIR变量表示开发板特有的代码所在的目录。
ifdef BOARD
sinclude $(TOPDIR)/board/$(BOARDDIR)/config.mk # include board specific rules
endif
Make将“board/ti/ti8168_dvr/config.mk”包含进来。该脚本只有如下的一行代码&#xff1a;
TEXT_BASE &#61; 0x80700000
U-Boot编译时将使用TEXT_BASE作为代码段连接的起始地址。
LDFLAGS &#43;&#61; -Bstatic -T $(obj)u-boot.lds $(PLATFORM_LDFLAGS)
ifneq ($(TEXT_BASE),)
LDFLAGS &#43;&#61; -Ttext $(TEXT_BASE)
endif
执行完以上代码后&#xff0c;LDFLAGS中包含了“-Bstatic -T u-boot.lds ”和“-Ttext 0x80700000”的字样。
5> 指定隐含的编译规则
# Allow boards to use custom optimize flags on a per dir/file basis
BCURDIR :&#61; $(notdir $(CURDIR))
$(obj)%.s: %.S
$(CPP) $(AFLAGS) $(AFLAGS_$(&#64;F)) $(AFLAGS_$(BCURDIR)) -o $&#64; $<
$(obj)%.o: %.S
$(CC) $(AFLAGS) $(AFLAGS_$(&#64;F)) $(AFLAGS_$(BCURDIR)) -o $&#64; $<-c
$(obj)%.o: %.c
$(CC) $(CFLAGS) $(CFLAGS_$(&#64;F)) $(CFLAGS_$(BCURDIR)) -o $&#64; $<-c
$(obj)%.i: %.c
$(CPP) $(CFLAGS) $(CFLAGS_$(&#64;F)) $(CFLAGS_$(BCURDIR)) -o $&#64; $<-c
$(obj)%.s: %.c
$(CC) $(CFLAGS) $(CFLAGS_$(&#64;F)) $(CFLAGS_$(BCURDIR)) -o $&#64; $<-c -S
例如&#xff1a;根据以上的定义&#xff0c;以“.s”结尾的目标文件将根据第一条规则由同名但后缀为“.S”的源文件来生成&#xff0c;若不存在“.S”结尾的同名文件则根据最后一条规则由同名的“.c”文件生成。
(3) 下面回来接着分析Makefile的内容&#xff1a;
# U-Boot objects....order is important (i.e. start must be first)
OBJS &#61; cpu/$(CPU)/start.o
LIBS &#43;&#61; cpu/$(CPU)/lib$(CPU).a
ifdef SOC
LIBS &#43;&#61; cpu/$(CPU)/$(SOC)/lib$(SOC).a
endif
ifeq ($(CPU),ixp)
LIBS &#43;&#61; cpu/ixp/npe/libnpe.a
endif
LIBS &#43;&#61; lib_$(ARCH)/lib$(ARCH).a
LIBS &#43;&#61; fs/cramfs/libcramfs.a fs/fat/libfat.a fs/fdos/libfdos.a fs/jffs2/libjffs2.a \
fs/reiserfs/libreiserfs.a fs/ext2/libext2fs.a fs/yaffs2/libyaffs2.a \
fs/ubifs/libubifs.a
… …
LIBS &#43;&#61; common/libcommon.a
LIBS &#43;&#61; libfdt/libfdt.a
LIBS &#43;&#61; api/libapi.a
LIBS &#43;&#61; post/libpost.a
LIBS :&#61; $(addprefix $(obj),$(LIBS))
LIBS变量指明了U-Boot需要的库文件&#xff0c;包括平台/开发板相关的目录、通用目录下相应的库&#xff0c;都通过相应的子目录编译得到的。
对于ti8168_dvr开发板&#xff0c;以上跟平台相关的有以下几个&#xff1a;
cpu/$(CPU)/start.o
board/$(VENDOR)/common/lib$(VENDOR).a
cpu/$(CPU)/lib$(CPU).a
cpu/$(CPU)/$(SOC)/lib$(SOC).a
lib_$(ARCH)/lib$(ARCH).a
其余都是与平台无关的。
ifeq ($(CONFIG_NAND_U_BOOT),y)
NAND_SPL &#61; nand_spl
U_BOOT_NAND &#61; $(obj)u-boot-nand.bin
endif
ifeq ($(CONFIG_ONENAND_U_BOOT),y)
ONENAND_IPL &#61; onenand_ipl
U_BOOT_ONENAND &#61; $(obj)u-boot-onenand.bin
ONENAND_BIN ?&#61; $(obj)onenand_ipl/onenand-ipl-2k.bin
endif
对于有的开发板&#xff0c;U-Boot支持在NAND Flash启动&#xff0c;这些开发板的配置文件定义了CONFIG_NAND_U_BOOT&#xff0c;CONFIG_ONENAND_U_BOOT。对于ti8168_dvr&#xff0c;U-Boot原始代码支持NAND Flash启动&#xff0c;因此定义CONFIG_NAND_U_BOOT这个宏。
ALL &#43;&#61; $(obj)u-boot.srec $(obj)u-boot.bin $(obj)System.map $(U_BOOT_NAND) $(U_BOOT_ONENAND)
all: $(ALL)
其中U_BOOT_NAND与U_BOOT_ONENAND 为空&#xff0c;而u-boot.srec&#xff0c;u-boot.bin&#xff0c;System.map都依赖与u-boot。因此执行“make all”命令将生成u-boot&#xff0c;u-boot.srec&#xff0c;u-boot.bin&#xff0c;System.map 。其中u-boot是ELF文件&#xff0c;u-boot.srec是Motorola S-Record format文件&#xff0c;System.map 是U-Boot的符号表&#xff0c;u-boot.bin是最终烧写到开发板的二进制可执行的文件。
$(obj)u-boot.ti: $(obj)u-boot.bin
$(obj)tools/mkimage -T tiimage \
-e $(TI_LOAD_ADDR) -n $(TI_DEVICE) -d $<$(obj)$(TI_IMAGE)
TI8168的u-boot.ti依赖u-boot.bin。
下面再来分析u-boot.bin文件生成的过程。ELF格式“u-boot”文件生成规则如下&#xff1a;
$(obj)u-boot: depend $(SUBDIRS) $(OBJS) $(LIBBOARD) $(LIBS) $(LDSCRIPT) $(obj)u-boot.lds
$(GEN_UBOOT)
ifeq ($(CONFIG_KALLSYMS),y)
smap&#61;&#96;$(call SYSTEM_MAP,u-boot) | \
awk &#39;$$2 ~ /[tTwW]/ {printf $$1 $$3 "\\\\000"}&#39;&#96; ; \
$(CC) $(CFLAGS) -DSYSTEM_MAP&#61;"\"$${smap}\"" \
-c common/system_map.c -o $(obj)common/system_map.o
$(GEN_UBOOT) $(obj)common/system_map.o
endif
这里生成的$(obj)u-boot目标就是ELF格式的U-Boot文件了。由于CONFIG_KALLSYMS未定义&#xff0c;因此ifeq ($(CONFIG_KALLSYMS),y)与endif间的代码不起作用。
其中depend&#xff0c;$(SUBDIRS)&#xff0c;$(OBJS)&#xff0c;$(LIBBOARD)&#xff0c;$(LIBS)&#xff0c;$(LDSCRIPT)&#xff0c; $(obj)u-boot.lds是$(obj)u-boot的依赖&#xff0c;而$(GEN_UBOOT)编译命令。
下面分析$(obj)u-boot的各个依赖&#xff1a;
1依赖目标depend
# Explicitly make _depend in subdirs containing multiple targets to prevent
# parallel sub-makes creating .depend files simultaneously.
depend dep: $(TIMESTAMP_FILE) $(VERSION_FILE) $(obj)include/autoconf.mk
for dir in $(SUBDIRS) cpu/$(CPU) $(dir $(LDSCRIPT)) ; do \ $(MAKE) -C $$dir _depend ; done
对于$(SUBDIRS)&#xff0c;cpu/$(CPU)&#xff0c;$(dir $(LDSCRIPT))中的每个元素都进入该目录执行“make _depend”&#xff0c;生成各个子目录的.depend文件&#xff0c;.depend列出每个目标文件的依赖文件。
2 依赖SUBDIRS
SUBDIRS &#61; tools \
examples/standalone \
examples/api
$(SUBDIRS): depend
$(MAKE) -C $&#64; all
执行tools &#xff0c;examples/standalone &#xff0c;examples/api目录下的Makefile。
3OBJS
OBJS的值是“cpu/arm_cortexa8/start.o”。它使用如下代码编译得到&#xff1a;
$(OBJS): depend
$(MAKE) -C cpu/$(CPU) $(if $(REMOTE_BUILD),$&#64;,$(notdir $&#64;))
以上规则表明&#xff0c;对于OBJS包含的每个成员&#xff0c;都进入cpu/$(CPU)目录&#xff08;即cpu/arm_cortexa8&#xff09;编译它们。
4LIBBOARD
LIBBOARD &#61; board/$(BOARDDIR)/lib$(BOARD).a
LIBBOARD :&#61; $(addprefix $(obj),$(LIBBOARD))
… …
$(LIBBOARD): depend $(LIBS)
$(MAKE) -C $(dir $(subst $(obj),,$&#64;))
这里LIBBOARD的值是 $(obj)board/ti/ti8168_dvr/libti8168_dvr.a。make执行board/ti/ti8168_dvr/目录下的Makefile&#xff0c;生成libti8168_dvr.a 。
5LIBS
LIBS变量中的每个元素使用如下的规则编译得到&#xff1a;
$(LIBS): depend $(SUBDIRS)
$(MAKE) -C $(dir $(subst $(obj),,$&#64;))
上面的规则表明&#xff0c;对于LIBS中的每个成员&#xff0c;都进入相应的子目录执行“make”命令编译它们。例如对于LIBS中的“common/libcommon.a”成员&#xff0c;程序将进入common目录执行Makefile&#xff0c;生成libcommon.a 。
6LDSCRIPT
LDSCRIPT :&#61; $(SRCTREE)/cpu/$(CPU)/u-boot.lds
… …
$(LDSCRIPT): depend
$(MAKE) -C $(dir $&#64;) $(notdir $&#64;)
“$(MAKE) -C $(dir $&#64;) $(notdir $&#64;)”命令经过变量替换后就是“make -C cpu/arm_cortexa8/ u-boot.lds”。也就是转到cpu/arm_cortexa8/目录下&#xff0c;执行“make u-boot.lds”命令。
7$(obj)u-boot.lds
$(obj)u-boot.lds: $(LDSCRIPT)
$(CPP) $(CPPFLAGS) $(LDPPFLAGS) -ansi -D__ASSEMBLY__ -P - <$^ >$&#64;
/* 输出为ELF文件&#xff0c;小端方式&#xff0c; */
OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm")
OUTPUT_ARCH(arm)
ENTRY(_start)
SECTIONS
{
. &#61; 0x00000000;
. &#61; ALIGN(4);
.text :
{
/* cpu/arm920t/start.o放在最前面&#xff0c;保证最先执行的是start.o */
arch/arm/cpu/arm_cortexa8/start.o (.text)
arch/arm/cpu/arm_cortexa8/ti81xx/lowlevel_init.o (.text)
/* 其他文件的代码段 */
*(.text)
/*以下2个文件必须放在前4K&#xff0c;因此也放在前面&#xff0c;其中board/samsung/mini2440/lowlevel_init.o 包含内存初始化所需代码&#xff0c;而 board/samsung/mini2440/nand_read.o 包含U-Boot从NAND Flash搬运自身的代码 */
board/samsung/mini2440/lowlevel_init.o (.text)
board/samsung/mini2440/nand_read.o (.text)
}
/* 只读数据段 */
. &#61; ALIGN(4);
.rodata : { *(SORT_BY_ALIGNMENT(SORT_BY_NAME(.rodata*))) }
/* 代码段 */
. &#61; ALIGN(4);
.data : { *(.data) }
/* u-boot自定义的got段 */
. &#61; ALIGN(4);
.got : { *(.got) }
__u_boot_cmd_start &#61; .; /*将 __u_boot_cmd_start指定为当前地址 */
.u_boot_cmd : { *(.u_boot_cmd) } /* 存放所有U-Boot命令对应的cmd_tbl_t结构体 */
__u_boot_cmd_end &#61; .; /* 将__u_boot_cmd_end指定为当前地址 */
/* bss段 */
. &#61; ALIGN(4);
__bss_start &#61; .;
.bss (NOLOAD) : { *(.bss) . &#61; ALIGN(4); }
_end &#61; .; /* 将_end指定为当前地址 */
}
u-boot.lds实质上是U-Boot连接脚本。对于生成的U-Boot编译生成的“u-boot”文件&#xff0c;可以使用objdump命令可以查看它的分段信息&#xff1a;
$arm-none-linux-gnueabi-objdump -x u-boot | more
部分输出信息如下&#xff1a;
u-boot: file format elf32-littlearm
u-boot
architecture: arm, flags 0x00000112:
EXEC_P, HAS_SYMS, D_PAGED
start address 0x80700000
Program Header:
LOAD off 0x00008000 vaddr 0x80700000 paddr 0x80700000 align 2**15
filesz 0x00030a94 memsz 0x000686d8 flags rwx
STACK off 0x00000000 vaddr 0x00000000 paddr 0x00000000 align 2**2
filesz 0x00000000 memsz 0x00000000 flags rwx
private flags &#61; 5000002: [Version5 EABI] [has entry point]
Sections:
Idx Name Size VMA LMA File off Algn
0 .text 00024568 80700000 80700000 00008000 2**5
CONTENTS, ALLOC, LOAD, READONLY, CODE
1 .rodata 000013b0 80724568 80724568 0002c568 2**3
CONTENTS, ALLOC, LOAD, READONLY, DATA
2 .rodata.str1.1 000064f5 80725918 80725918 0002d918 2**0
CONTENTS, ALLOC, LOAD, READONLY, DATA
3 .data 00004744 8072be10 8072be10 00033e10 2**2
CONTENTS, ALLOC, LOAD, DATA
4 .u_boot_cmd 00000540 80730554 80730554 00038554 2**2
CONTENTS, ALLOC, LOAD, DATA
5 .bss 00037c40 80730a98 80730a98 00038a94 2**3
ALLOC
6 .ARM.attributes 00000029 00000000 00000000 00038a94 2**0
CONTENTS, READONLY
7 .comment 00000f1e 00000000 00000000 00038abd 2**0
CONTENTS, READONLY
8 .debug_frame 00000040 00000000 00000000 000399dc 2**2
CONTENTS, READONLY, DEBUGGING
SYMBOL TABLE:
80700000 l d .text 00000000 .text
80724568 l d .rodata 00000000 .rodata
80725918 l d .rodata.str1.1 00000000 .rodata.str1.1
8072be10 l d .data 00000000 .data
----------------------------------------------------------------------------------------------
u-boot: file format elf32-little
u-boot
architecture: UNKNOWN!, flags 0x00000112:
EXEC_P, HAS_SYMS, D_PAGED
start address 0x33f80000
Program Header:
LOAD off 0x00008000 vaddr 0x33f80000 paddr 0x33f80000 align 2**15
filesz 0x0002f99c memsz 0x00072c94 flags rwx
STACK off 0x00000000 vaddr 0x00000000 paddr 0x00000000 align 2**2
filesz 0x00000000 memsz 0x00000000 flags rwx
Sections:
Idx Name Size VMA LMA File off Algn
0 .text 00024f50 33f80000 33f80000 00008000 2**5
CONTENTS, ALLOC, LOAD, READONLY, CODE
1 .rodata 00008b78 33fa4f50 33fa4f50 0002cf50 2**3
CONTENTS, ALLOC, LOAD, READONLY, DATA
2 .data 00001964 33fadac8 33fadac8 00035ac8 2**2
CONTENTS, ALLOC, LOAD, DATA
3 .u_boot_cmd 00000570 33faf42c 33faff2c 0003742c 2**2
CONTENTS, ALLOC, LOAD, DATA
4 .bss 00043294 33fafa00 33fafa00 0003799c 2**8
ALLOC
… …
-------------------------------------------------------------------------------------------------
u-boot.lds还跟U-Boot启动阶段到RAM空间的过程以及U-Boot命令执行过程密切相关&#xff0c;具体请结合U-Boot源代码理解。
编译命令GEN_UBOOT
GEN_UBOOT &#61; \
UNDEF_SYM&#61;&#96;$(OBJDUMP) -x $(LIBBOARD) $(LIBS) | \
sed -n -e &#39;s/.*\($(SYM_PREFIX)__u_boot_cmd_.*\)/-u\1/p&#39;|sort|uniq&#96;;\
cd $(LNDIR) && $(LD) $(LDFLAGS) $$UNDEF_SYM $(__OBJS) \
--start-group $(__LIBS) --end-group $(PLATFORM_LIBS) \
-Map u-boot.map -o u-boot
以上命令使用$(LDFLAGS)作为连接脚本&#xff0c;最终生成“u-boot”文件。
u-boot.bin文件生成过程
生成u-boot.bin文件的规则如下&#xff1a;
$(obj)u-boot.bin: $(obj)u-boot
$(OBJCOPY) ${OBJCFLAGS} -O binary $<$&#64;
从U-Boot编译输出信息中可以知道上面的命令实质上展开为&#xff1a;
arm-linux-objcopy --gap-fill&#61;0xff -O binary u-boot u-boot.bin
编译命令中的“-O binary”选项指定了输出的文件为二进制文件。而“--gap-fill&#61;0xff”选项指定使用“0xff”填充段与段间的空闲区域。这条编译命令实现了ELF格式的U-Boot文件到BIN格式的转换。
u-boot.map文件的生成
u-boot.map是U-Boot的符号表&#xff0c;它包含了U-Boot的全局变量和函数的地址信息。将u-boot.map生成的规则如下&#xff1a;
GEN_UBOOT &#61; \
UNDEF_SYM&#61;&#96;$(OBJDUMP) -x $(LIBBOARD) $(LIBS) | \
sed -n -e &#39;s/.*\($(SYM_PREFIX)__u_boot_cmd_.*\)/-u\1/p&#39;|sort|uniq&#96;;\
cd $(LNDIR) && $(LD) $(LDFLAGS) $$UNDEF_SYM $(__OBJS) \
--start-group $(__LIBS) --end-group $(PLATFORM_LIBS) \
-Map u-boot.map -o u-boot
$vim u-boot.map
Memory Configuration
Name Origin Length Attributes
*default* 0x00000000 0xffffffff
Linker script and memory map
0x00000000 . &#61; 0x0
0x00000000 . &#61; ALIGN (0x4)
.text 0x80700000 0x24568
arch/arm/cpu/arm_cortexa8/start.o(.text)
.text 0x80700000 0x3a0 arch/arm/cpu/arm_cortexa8/start.o
0x80700040 _end_vect
0x80700048 _bss_start
0x8070004c _bss_end
0x80700044 _armboot_start
0x80700000 _start
arch/arm/cpu/arm_cortexa8/ti81xx/lowlevel_init.o(.text)
.text 0x807003a0 0x5c arch/arm/cpu/arm_cortexa8/ti81xx/lowlevel_init.o
0x807003a4 lowlevel_init
*(.text)
.text 0x807003fc 0x31c arch/arm/lib/libarm.a(board.o)
0x807003fc hang
0x80700504 start_armboot
.text 0x80700718 0x264 arch/arm/lib/libarm.a(interrupts.o)
0x807008a4 do_fiq
0x80700958 do_undefined_instruction
0x80700724 show_regs
0x80700880 do_irq
0x80700864 bad_mode
0x80700910 do_prefetch_abort
0x8070071c disable_interrupts
0x807008c8 do_not_used
0x807008ec do_data_abort
0x80700934 do_software_interrupt
--------------------------------------------------------------------------------------------------------
System.map文件的生成
System.map是U-Boot的符号表&#xff0c;它包含了U-Boot的全局变量和函数的地址信息。将System.map生成的规则如下&#xff1a;
SYSTEM_MAP &#61; \
$(NM) $1 | \
grep -v &#39;\(compiled\)\|\(\.o$$\)\|\( [aUw] \)\|\(\.\.ng$$\)\|\(LASH[RL]DI\)&#39; | \
LC_ALL&#61;C sort
$(obj)System.map: $(obj)u-boot
&#64;$(call SYSTEM_MAP,$<) > $(obj)System.map
arm-linux-nm u-boot | grep -v &#39;\(compiled\)\|\(\.o$$\)\|\( [aUw] \)\|\(\.\.ng$$\)\|\(LASH[RL]DI\)&#39; | LC_ALL&#61;C sort > System.map
也就是将arm-linux-nm命令查看u-boot的输出信息经过过滤和排序后输出到System.map。为了了解System.map文件的作用&#xff0c;打开System.map&#xff1a;
33f80000 T _start
33f80020 t _undefined_instruction
33f80024 t _software_interrupt
33f80028 t _prefetch_abort
33f8002c t _data_abort
33f80030 t _not_used
33f80034 t _irq
33f80038 t _fiq
33f80040 t _TEXT_BASE
33f80044 T _armboot_start
33f80048 T _bss_start
33f8004c T _bss_end
… …
System.map表示的是地址标号到该标号表示的地址的一个映射关系。System.map每一行的格式都是“addr type name”&#xff0c;addr是标号对应的地址值&#xff0c;name是标号名&#xff0c;type表示标号的类型。
U-Boot的编译和运行并不一定要生成System.map&#xff0c;这个文件主要是提供给用户或外部程序调试时使用的。
三. U-Boot 启动全过程



 京公网安备 11010802041100号
京公网安备 11010802041100号