作者:多米音乐_34024963 | 来源:互联网 | 2024-11-17 13:20
最近在研究TDOA定位技术,特别是Chan算法和Taylor算法的性能对比。这两种算法在多基站定位系统中应用广泛,各有优势。为了更好地理解它们的差异,我使用MATLAB进行了详细的仿真。
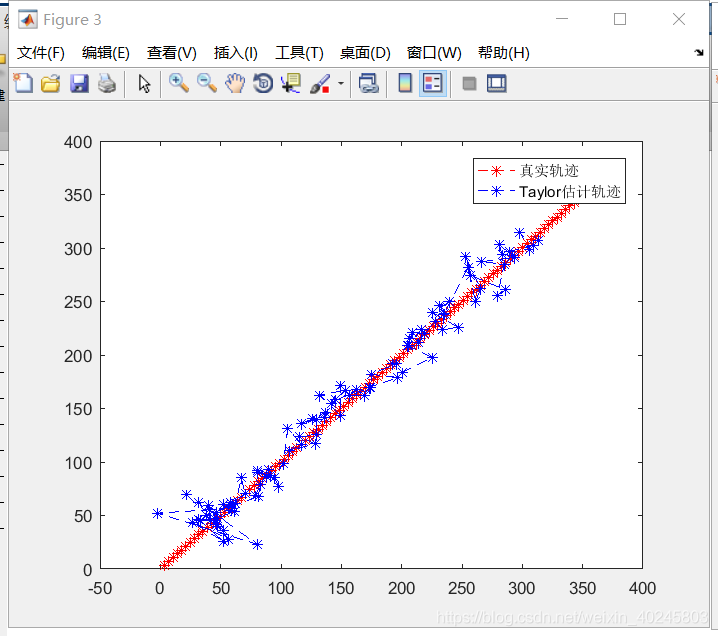
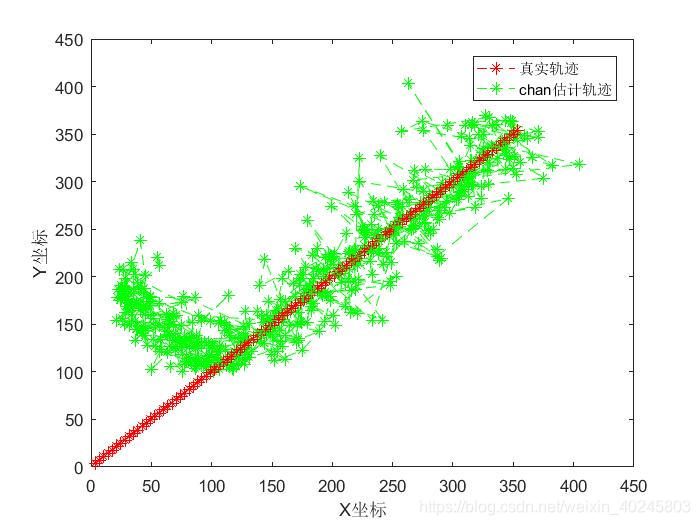
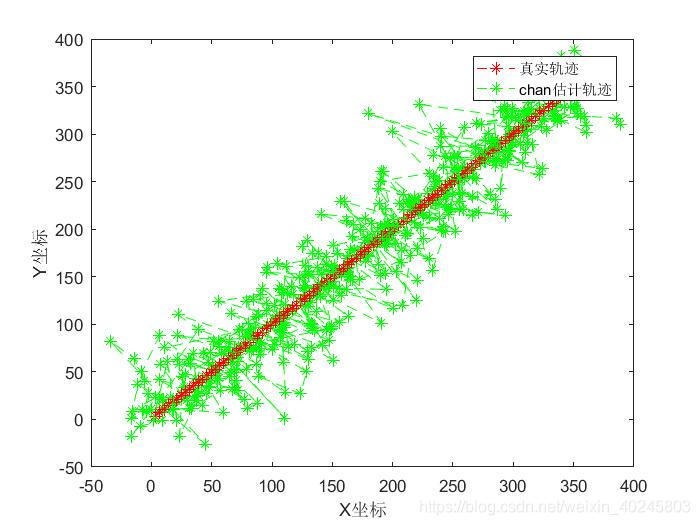
以下是两种算法的仿真效果图:
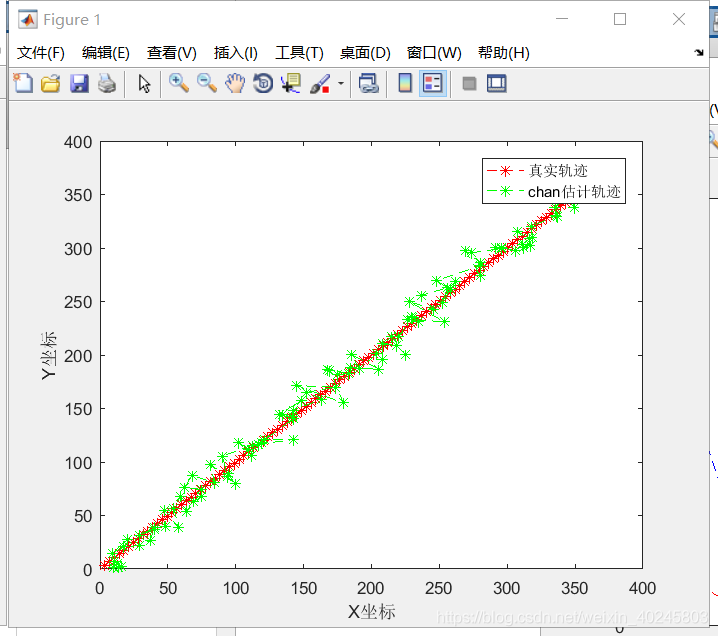
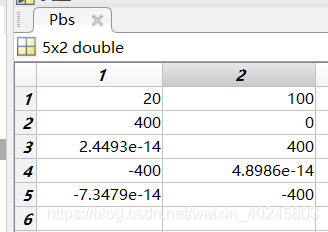
在仿真中,假设运动目标从原点出发,沿x=y方向做匀速运动。观测站的坐标如下所示:
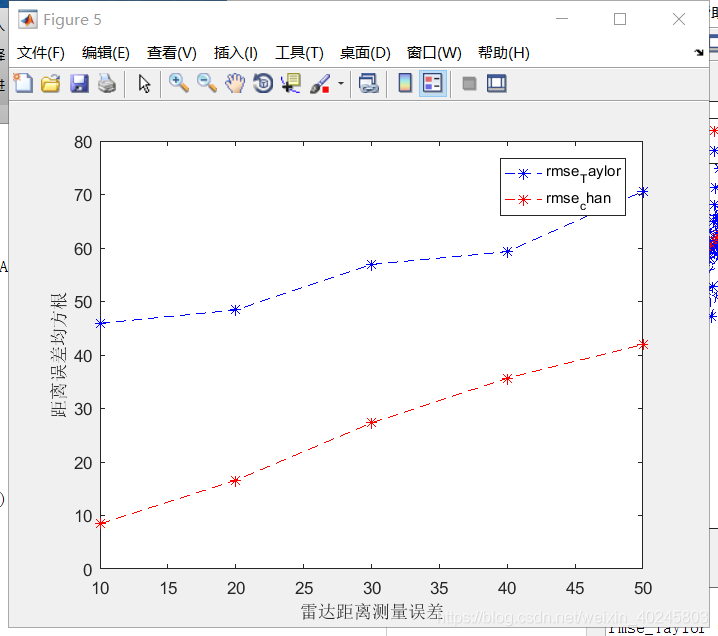
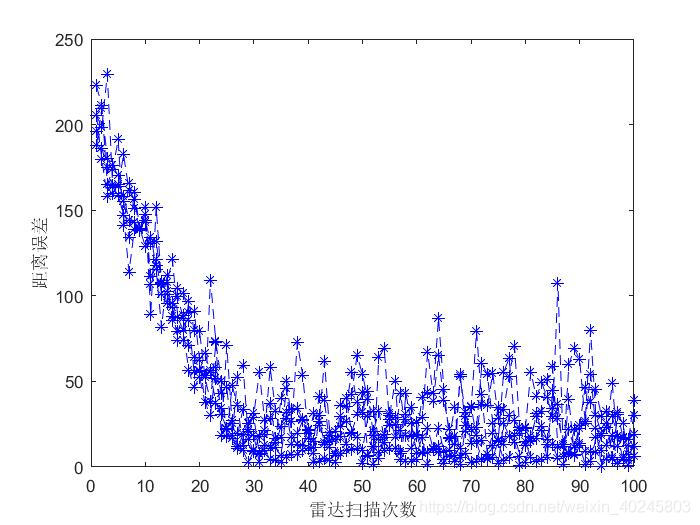
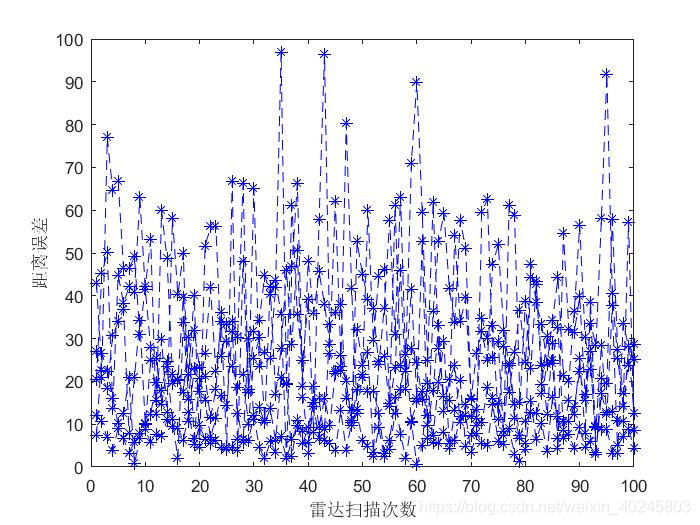
在不同的雷达测距误差下,两种算法的定位误差如下图所示:
需要注意的是,Taylor算法的初值选择非常关键。在仿真中,直接使用真实值作为初值,这在实际应用中是不可行的。建议使用第一次最小二乘法(LS)或加权最小二乘法(WLS)的定位结果作为初值,以更贴近实际情况。
通过仿真,可以明显看出两种算法的差异。需要源码的同学可以在我的主页下载。
感谢Iam_Flash的提问,关于chan算法的改进,建议在第二次WLS定位中选择位置。由于参考基站的位置会影响第二次WLS的求解结果,建议将参考基站设置为(0,0),确保待测目标出现在第一象限内,避免出现虚数解。如果出现虚数解,可以通过特定方法进行处理,恢复出估计值。
未修改参考基站坐标时,直接更改chan算法的位置参数,可能会导致如下情况:
虚数解被滤除。修改参考基站坐标后,将参考基站坐标改为(-100,-100),重新输出结果如下:
function [rmse_c, rmse_T] = TDOAchan_Taylor_comparise(noise)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 设置基站信息
% delta TDOA测量误差的标准差,用于产生Q矩阵
% M 参考基站外的基站数量
% Xb = -100; Yb = -100; %参考的基站坐标
% c 光速
% X 参考基站的坐标
% T: 雷达的扫描间隔,此时设为1秒
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
delta = noise;
M = 4;
Xb = -100; Yb = -100; %参考的基站坐标
c = 3e8;
X = zeros(M, 2);
T = 1;
%生成其他基站的坐标
a = 2 * pi / M;
for i = 1:M
X(i, 1) = 3000 * cos(a * (i - 1));
X(i, 2) = 3000 * sin(a * (i - 1));
end








 京公网安备 11010802041100号
京公网安备 11010802041100号