使用神经网络来实现自动驾驶,也就是说使汽车通过学习来自己驾驶。
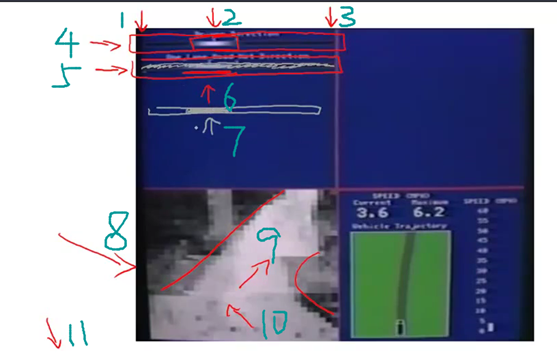
下图是通过神经网络学习实现自动驾驶的图例讲解:
左下角是汽车所看到的前方的路况图像。左上图,可以看到一条水平的菜单栏(数字4所指示方向),白亮的区段显示的就是人类驾驶者选择的方向。而最右端则对应向右急转的操作(箭头3),中心稍微向左一点的位置(箭头2),则表示在这一点上人类驾驶者的操作是慢慢的向左拐。这幅图的第二部分(箭头5)对应的就是学习算法选出的行驶方向,类似的白亮的区段(箭头6)显示的就是神经网络在这里选择的行驶方向是稍微的左转,实际上在神经网络开始学习之前,会看到网络的输出是一条灰色的区段(箭头7),灰色区域显示出神经网络已经随机初始化了,并且初始化时我们并不知道汽车如何行驶,或者说,我们并不知道所选行驶方向,只有在学习算法运行了足够长的时间之后,才会有这条白色的区段出现在整条灰色区域之中,显示出一个具体的行驶方向。这就表示神经网络算法在这时候已经选出了一个明确的行驶方向, 不像刚开始的时候输出一段模糊的浅灰色区域,而是输出一条白亮的区段。










 京公网安备 11010802041100号
京公网安备 11010802041100号