在ROS系统中,对机器视觉的支持是通过添加摄像头驱动,集成OpenCV算法库,集成基于机器人位置对摄像头光学坐标系进行坐标变换(tf)的工具和一系列第三方工具实现的,包括视觉测量、增强现实、物体检测和智能感知等各种算法。
(1)连接和运行摄像头
ROS系统提供官方支持的FireWire摄像头,由于实验条件限制没有这种设备,使用USB摄像头进行展示。有两个主要的选项能用于USB摄像头驱动。
num1 usb_cam
如果想安装usb_cam需要运行以下命令:
$ cd ~/dev/rosbook
$ svn co http://svn.code.sf.net/p/bosch-ros-pkg/code/trunk/stacks/bosch_drivers/usb_cam
$ cd usb_cam
$ rosmake usb_cam
在这之后运行以下命令,显示摄像头数据,其本身就是USB摄像头的原始图像,即为彩色。
$ roslaunch chapter6_tutorials usb_cam.launch view:=true

类似地其他好的选择还有gscam。
(2)使用OpenCV制作USB摄像头驱动程序
驱动是通过调用OpenCV的cv::VideoCapture类来实现的,它能驱动摄像头并且允许我们去修改它的一些书本所支持的参数。然而,事实上使用usb_cam不可能实现这些功能,因为CameraInfo消息是不可用的,因此camera_info_url并不能在参数文件params/usb_cam/logitech.yaml中设置。而在gscam中,我们可以进行更多的控制。
使用OpenCV实现摄像头驱动主要有两种方法。第一是根据每秒钟给定的图像数量(FPS)进行轮询,第二是能够根据FPS设定一个计时器并在计时器的回调函数中完成实际的读取。主要包括的技术有创建USB摄像头驱动功能包、使用ImageTransport API发布摄像头帧、使用cv_bridge进行OpenCV和ROS图像处理、使用ImageTransport发布图像、在ROS中使用OpenCV等。
以下为camera_polling的显示结果。
$ roslaunch chapter6_tutorials camera_polling.launch camera_index:=0 fps:=15 view:=true

(3)标定摄像头
在USB摄像头驱动下进行的标定
$ roslaunch chapter6_tutorials camera.launch calibrate:=true

双目标定
$ sudo apt-get install v4l-utils qv4l2
$ roslaunch chapter6_tutorials camera_stereo.launch view:=true
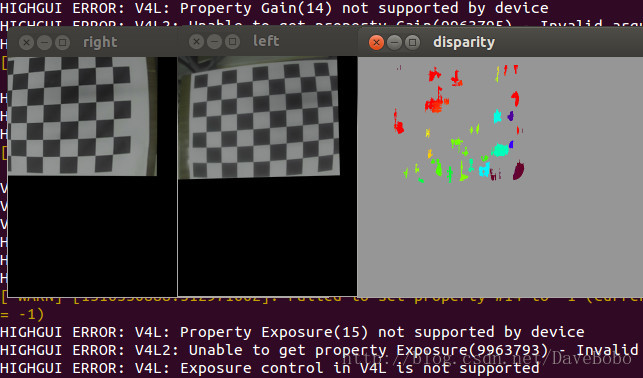
这里我的实验效果并不好,有时间再仔细研究。
使用viso2执行视觉测距
在ROS Fuerte和Groovy中都包含了当前版本的viso2,然而这两个版本中都需要使用catkin编译系统。我们已经介绍了rosmake经典的编译系统,在此我们为基于catkin安装的viso2进行详细的指导,运行如下命令:
$ cd ~
$ mkdir ros
$ cd ros
$ mkdir -p catkin_ws/src
$ cd catkin_ws/src/
References:
[1]. Aaron Martinez Enrique Fern andez, ROS机器人程序设计[B], P126-160, 2014.
http://wiki.ros.org/gscam
http://wangsx.cn/?p=604
https://www.cnblogs.com/Jessica-jie/p/6520061.html







 京公网安备 11010802041100号
京公网安备 11010802041100号