
自主泊车产品正在走进公众视野:一方面越来越多的主机厂将自主泊车作为一大技术升级,不断提升用户体验;另一方面自主泊车搭载进共享出行车辆,也成为自动驾驶一大商业化应用场景。
不少自动驾驶初创公司也希冀借自主泊车弯道超车,将其定义为自动驾驶商业化最现实的路径之一。2019年过半,多数于去年开始投入自主泊车研发储备的公司,已经走出概念阶段,迈进产品化和测试量产。
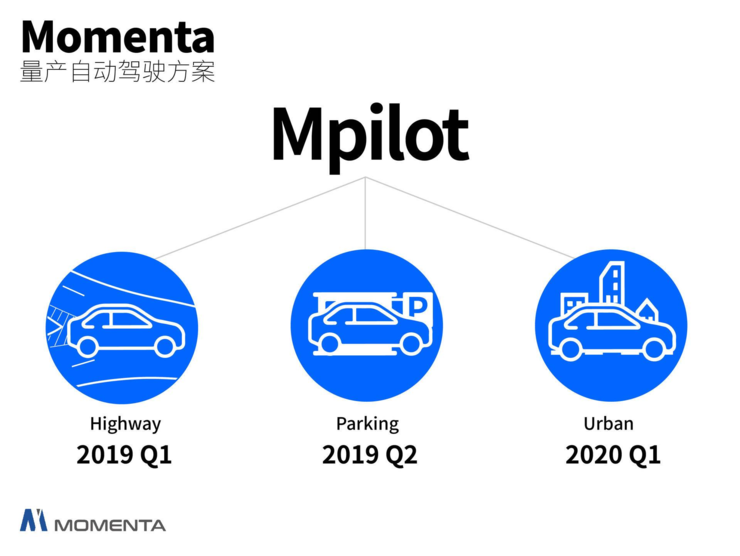
国内自动驾驶方案供应商Momenta也于近期正式公布其自主泊车方案 Mpilot Parking。这是继3月对外展示面向高速场景的可量产自动驾驶解决方案 Mpilot Highway 后,Mpilot 系列方案的第二次亮相。雷锋网(公众号:雷锋网)新智驾了解到,继高速自动驾驶(Mpilot Highway)、自主泊车(Mpilot Parking)之后,搭载激光雷达的城区自动驾驶(即Robotaxi)和搭载量产方案的完全自动驾驶也将会相继发布。
在一片混沌的AVP战场上,Momenta的自主泊车方案又有哪些特点?
车规级、可量产硬件:没有激光雷达,采用可量产的传感器;千元级成本;
高精地图:基于视觉Slam建图技术,Momenta 支持量产车辆车端自动建图;
为加速规模化量产落地,Momenta自主泊车方案主张“在车端做到极致”,即不依赖场端技术,通过视觉Slam建图技术,实现地下车库的定位和车端自动生成高精地图。
雷锋网新智驾轻度体验了一把 Momenta自主泊车功能,先来看看Mpilot Parking的具体表现。
此次体验位于Momenta苏州办公室地下约500平米的停车场。搭载Mpilot Parking的自动驾驶车辆顺利完成了从停车场入口到指定即任意车位的自主泊车,实现了在停车场复杂的车流人流环境下的跨层泊车、智能绕行、避让车辆行人、在线寻位、智能召唤等多项功能。
*车辆错车及绕行处理
*行人避让,车辆避让及错车处理
此次试乘环境完全符合日常停车的真实场景,过程中遇到了诸多复杂情况,例如行人穿行、车辆占道、路口错车、突然出车等。Mpilot Parking 实时捕捉到周围的车辆状态和障碍物,甚至是位于柱子后的人、突然出现的行人,完成及时避障,实时规划出绕行轨迹,避免了因自动驾驶车辆无法处理会车、逆行、占道等情况而引起交通拥堵。全程无人工接管。

*车辆绕行和行人避让处理
*车辆避让及错车处理
雷锋网新智驾了解到,当Mpilot Parking搭载进量产车型后,用户可在手机端点选指定车位或允许车辆自行寻找车位,随即车辆即可自行从地上停车场入口下坡,完成自主泊车;当用户取车时,可以在远程召唤车辆来到指定地点,驾驶员上车后自主行驶出停车场。适用场景包括住宅、办公楼、商超、酒店以及共享出行等。
支持选定车位:住宅和写字楼,是车主每天通勤的高频泊车场景,往往会有固定的停车位或经验轨迹。
在线寻找车位:在商超、酒店、机场这类对泊车有高需求的公共场所,停车位不固定,需要系统能够实时探测车位,并判断车位占用信息。
在自主泊车背后,是 Mpilot Parking 可量产、车规级的软硬件方案。
车端传感器层面,Mpilot Parking 系统搭载4路环视鱼眼相机、1个前视相机、12个超声波雷达、消费级IMU和GPS,整个系统全部采用可量产的传感器。传感器的配置基本上是现在高端车的标配。
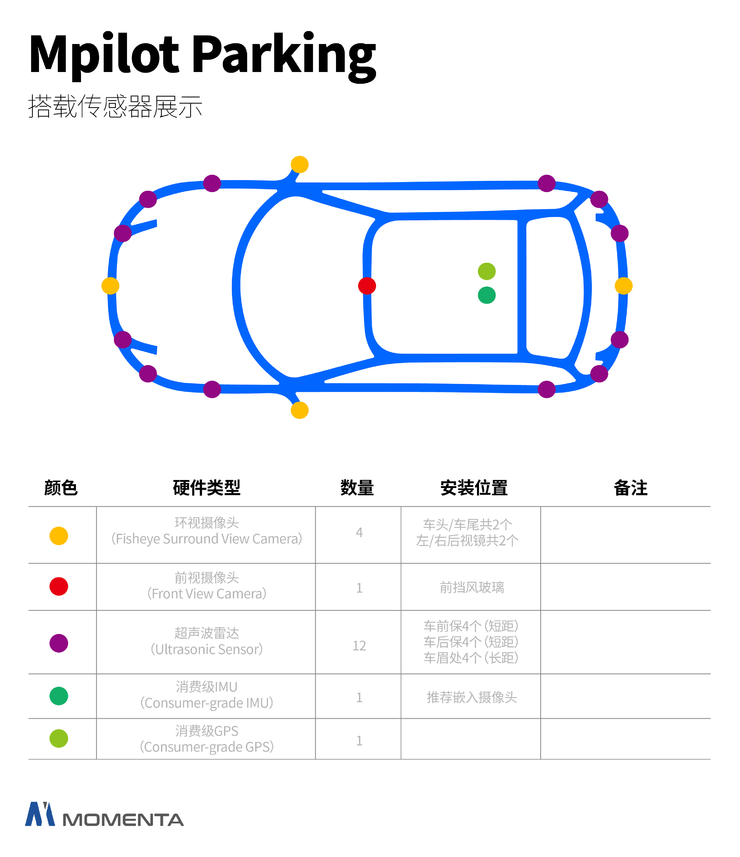
没有激光雷达,利用车规级传感器完成实时车位识别,离不开 Momenta 预先建好的停车场高精地图。高精地图是Mpilot Parking一大核心能力,可获取该停车场所有的车位信息。在车辆行驶过程中,高精地图融合环视感知以及超声波雷达感知的结果,可对车位空闲状态作出识别,自动判断所经过的车位是否可泊入。
雷锋网新智驾了解到,相比昂贵的激光雷达建图,Momenta采用视觉为主的方案实现自动化建图。建图采集系统使用四路环视鱼眼相机、消费级IMU及轮速等传感器。在建图过程中,通过深度学习算法提取视觉语义特征,使用SLAM技术自动生成基于语义的高精度地图。整个系统可进行云端和车端自动建图,精度达到10cm级别。
据Momenta高精地图相关负责人介绍,没有高成本激光雷达,Momenta 的视觉建图方案完全支持量产车辆自主建图,即通过众包实现快速规模化的建图和地图更新。
Momenta合伙人、研发总监夏炎提到,自动建图的能力,是Mpilot Parking规模化可量产的关键。因Momenta地图采集系统、建图系统和定位系统是基于同一套平台,车辆在进行定位时,如果发现真实环境和地图无法匹配时,就可以验证地图的准确性并及时进行更新。对于停车场中增加或消失的元素,众包车辆可自动实时完成地图元素的更新补充。
Momenta 的环境感知和高精地图技术均以深度学习为基础。在量产落地的过程中,如何将深度学习运行在车端嵌入式芯片上,Momenta 积累了大量实践。
相比于服务器的运算能力,车规级可量产的芯片往往提供的算力资源有限。例如,一般在深度学习训练服务器上使用的算力往往有上百 TFLOPS,而目前较前沿的车规级芯片的性能最多仅为 30 TOPS 左右。如何将多个深度学习模型压缩到一块有限算力的芯片上,同时又保证精度,这非常考验工程优化能力。
Momenta的思路是,在标准的平台上进行极致性能的研发,将体验达到极致;然后,将极致的性能压缩集成到量产芯片上。在可量产的芯片上,同时集成Mpilot Parking和Mpilot Highway的产品。
Momenta 从多个维度对深度学习进行深度优化。首先,芯片上往往会有不同的计算单元,需要在这些计算单元上,将深度学习的网络层进行计算优化,如卷积等操作;其次,针对不同的任务类型,可以对模型结构进行自动搜索,产生高效率、高精度的模型;再次,对模型进行低比特量化操作,在保证模型精度不损失的同时,使得模型在芯片上发挥出极致性能;最后,根据特定芯片的特点,从算法角度可以研发更加芯片友好的网络和算法框架。
不同于其它自主泊车产品, Mpilot Parking 对外展示的是单车智能、无需场端改造的技术能力。据夏炎介绍,Momenta也可以灵活根据客户的需求,接入其他场端信息。
Mpilot Parking 希望能通过以视觉为主的传感器方案,将系统在车端量产方案下的潜力做到极致,同时加入客户定制化需求,在保证安全性和鲁棒性的前提下实现更多复杂功能。
全球汽车行业正在广泛应用L3以下的ADAS系统,L3和L4的量产则处于只差临门一脚的关键阶段。规模化量产是包括Momenta在内的多数自动驾驶公司的一大目标。
在商业化布局上,Momenta实行“两条腿走路”,即现阶段可量产上车的自动驾驶,及无人驾驶方案同时开发。
Momenta Mpilot 是 Momenta 于今年3月发布的可量产自动驾驶解决方案,场景包括高速(Mpilot Highway)、泊车(Mpilot Parking)以及城市道路(Mpilot Urban)。夏炎也透露了Momenta自动驾驶量产时间线:
2019年3月,发布了高速自动驾驶系统Mpilot Highway;
2019年7月,发布了自主泊车系统Mpilot Parking;
2019年第三季度,Momenta即将发布搭载激光雷达的城区自动驾驶,即Robotaxi。
2020年第一季度,Momenta即将发布搭载量产方案的完全自动驾驶。
在个人乘用车上,用户最高频的使用场景是上下班的通勤,往返于家和公司,也就是从停车场到停车场。Momenta希望能够在用户最高频的使用场景上,提供从停车场取车——上高速环路——城市道路——停车场泊车的连贯的自动驾驶体验。此次发布的 Mpilot Parking,正是连续自动驾驶体验中重要的首尾一环。
雷锋网新智驾了解到,在Mpilot 的整套方案,基于一套标准的硬件计算平台:10个相机、12个超声波雷达、5个毫米波雷达,辅以其他传感器。该硬件方案,可以同时支持不同场景的自动驾驶,如 Mpilot Highway 和 Mpilot Parking。
通过在不同场景下传感器和计算单元的分时复用,可以让终端用户获得「双份体验」,让主机厂客户实现「二合一」成本优化。
夏炎提到“两条腿走路”背后的商业逻辑。在Momenta看来,量产自动驾驶和完全无人驾驶看起来是两个事情,但是其实是一件事,因无人驾驶不是一蹴而就的过程,要通过持续的高效的迭代反馈。而要做到持续迭代快速反馈,核心有以下三点:
大数据:即持续获取数据的能力,在实际路测和模拟仿真测试过程中,Momenta已集成感知数据、高精地图数据、驾驶员行为数据、众包数据等;
数据驱动算法:Momenta已拥有一套可以被数据驱动的算法工具;
数据与数据驱动算法之间的闭环:多种类型数据匹配Momenta深度学习的算法,进而迭代出来更好的产品,包括感知类技术、包括高精度地图技术、不同场景下的自动驾驶技术。这些算法同样能够匹配到Momenta车队中,车队在运行测试的过程中会产生出大量的数据,如此形成闭环的自动化。自动化闭环过程可增强算法迭代速度。自动填充数据后,算法能够自动找到最优的答案,进而完成迭代产品。
数据与数据驱动算法之间的闭环被Momenta定义为能够实现规模化,持续反馈,提升自动驾驶能力的关键。
Momenta将自动驾驶分成高速场景、泊车场景、城区场景三类场景。从商业化考虑上看,在两条腿走路的过程中,Momenta是基于量产传感器的方案,且传感器方案尽量去统一,如此在规模量产的路线当中,收集到的数据能够被完全无人自动驾驶使用、吸收和复用。同时,低成本可量产方案应用至主机厂,可实现快速规模化。通过规模化收集而来的数据,应用于完全无人驾驶的研发,不断提升算法。这正是Momenta闭环自动化的核心策略。
。










 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有 