首先我们下载目标检测和ReID预测模型,下载地址,然后统一放在
~/PaddleDetection/output_inference下
https://paddledet.bj.bcebos.com/models/mot/deepsort/ppyolov2_r50vd_dcn_365e_aic21mtmct_vehicle.tar
https://paddledet.bj.bcebos.com/models/mot/deepsort/deepsort_pplcnet_vehicle.tar
解压
在完成模型下载后,需要修改PaddleDetection/deploy/pptracking/python路径下的mtmct_cfg.yml,这份配置文件中包含了跨镜跟踪中轨迹融合的相关参数。首先需要确定cameras_bias中对应的名称与输入视频名称对应;其次,我们本次项目使用轨迹融合中的通用方法,将zone和camera相关的方法设置为False。修改后配置如下:
# config for MTMCT
MTMCT: True
cameras_bias:
c003: 0
c004: 0
# 1.zone releated parameters
use_zone: False #True
zone_path: dataset/mot/aic21mtmct_vehicle/S06/zone
# 2.tricks parameters, can be used for other mtmct dataset
use_ff: True
use_rerank: True
# 3.camera releated parameters
use_camera: False #True
use_st_filter: False
# 4.zone releated parameters
use_roi: False #True
roi_dir: dataset/mot/aic21mtmct_vehicle/S06
配置完成后下载视频,解压
https://bj.bcebos.com/v1/paddledet/data/mot/demo/mtmct-demo.tar
解压后mtmct-demo目录结构如下

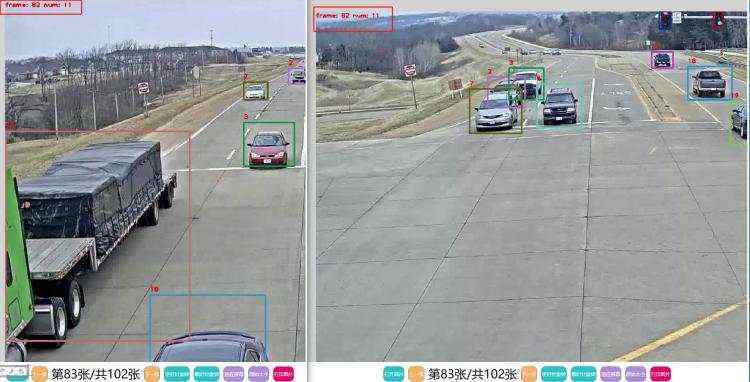
运行如下命令,输入视频为c003.mp4和c004.mp4两个不同视角的摄像头拍摄结果,跨镜跟踪输出视频保存在
python deploy/pptracking/python/mot_sde_infer.py --model_dir=output_inference/ppyolov2_r50vd_dcn_365e_aic21mtmct_vehicle/ --reid_model_dir=output_inference/deepsort_pplcnet_vehicle/ --mtmct_dir=mtmct-demo --device=GPU --mtmct_cfg=deploy/pptracking/python/mtmct_cfg.yml --scaled=True --save_mot_txts --save_images





 京公网安备 11010802041100号
京公网安备 11010802041100号