
我们只需要把物体移到坐标系中心 然后再将整个坐标缩放在[-1,1]之间就行了


最终正交矩阵

我们可以把透视投影的计算分两步
1.计算一个可以把透视投影转换成正射投影的矩阵a
2.将矩阵a和正射投影矩阵相乘得出最终的透视投影矩阵
有通俗的话来说 就是先将透视投影的远平面压成和近平面一样大 这样其内部的点的坐标都发生了改变 这样就可以按照正射投影来算了
首先我们知道 透视投影有几个特点
1.在近平面上的坐标不会发生任何改变
2.在远平面上的坐标z值不会发生改变
3.在中心点的坐标在近远平面上都不会发生改变
先求视景体内坐标经过压缩之后x和y值得变化


坐标转换就是通过相似三角形
n是近平面的深度值

上图就是任意眼坐标为(x,y,z,1)通过了透视投影矩阵 变成了(nx/z,ny/z,unk,1)的坐标 我们让该坐标×一个z也是同一个坐标(nx,ny,unk,z)

那我们通过(x,y,z,1)和(nx,ny,unk,z)之间的关系 除了矩阵p第三行 其他都能确定了
此时我们再利用上面说的 在近平面上的点坐标是不变的 (x,y,n,1)
因为所有视景体内坐标点×矩阵p都一定是(nx,ny,unk,z)
所以 (x,y,n,1)×矩阵p = (nx,ny,unk,z)
那么让 (x,y,n,1)×n 还是同一个点(nx,ny,n2,n) 所以将(x,y,n,1)带去矩阵p
矩阵p第三行×(x,y,n,1)一定是n2
由此可以知道第三行一定没用x和y 所以确定了第三行前两个数(0,0,?,?)
再通过远平面中心点也是不会改变坐标的这一性质(0,0,f,1)(f是远平面深度值)(0,0,f,1)×矩阵p一定也是( (nx,ny,unk,z))
将(0,0,f,1)×f = 0,0,f2,f) 再同上 带入矩阵

n 0 0 0
0 n 0 0
0 0 (n+f) (-nf)
0 0 1 0
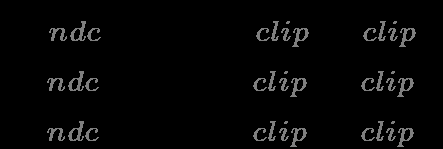
首先我们先知道 Xe是眼空间的坐标 眼坐标(应该是以摄像机为坐标系的空间)
Xp是视锥体内点Xe投射到近平面上的坐标点
Xc是裁剪空间的坐标 Xc和Xp的区别是Xc是真正的在裁剪空间里的点的坐标
Xn是Xc映射到标准化设备坐标的点 也就是Xc/Wc = Xn
Yp一样
和上面图形学老师的方法一样算出最后一行0,0,-1,0 并且此时Wc换成了Ze
y和z一样


将Xp和Yp代入上述方程式

他能确定那一部分是Xc是因为 Wc当时换成了-Ze

他说由于我们知道z不依赖于x或y值(我也不知道为什么知道不依赖) 所以能写成下面这样

然后通过两个近平面和远平面Zn和Ze的关系 近平面Ze一定是-n 远平面一定是-f 而Zn因为是标准化的坐标 所以近远平面z值一定是1和-1 所以就是将
(-n,-1)和(-f,1)代入就行了 最终得出答案
如果是对称的 则r = -l t = -b

最后一行可以是1也可也是-1 主要在于是左手坐标系还是右手坐标系








 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有 