1、request_firmware在内核使用,需要文件系统支持,就是说,启动的时候如果在驱动里面的probe函数调用 request_firmware ,那么系统将等待30s左右,因为文件系统还没有挂载,当然找不到固件了,所以最好在中断里面启动tasklet,然后request_firmware 。如果不想等待,就用request_firmware_nowait,好像是这样写的。
2、那么用户层怎么用?
实际上这个分x86和嵌入式,比如arm,平台。x86的用到了udev,
比如你要请求固件 fw.hex,那么必须在文件系统中导出环境变量,比如 export FIRMWARE=/lib/firmware,而且目录/lib/firmware不能少,因为busybox要用到。然后把固件fw.hex放到 /lib/firmware目录下即可。内核request_firmware的时候,busybox就知道去FIRMWARE找了。
3、对linux来讲,所谓的固件什么也不是,他只是按fopen()返回二进制文件给你,看看busybox的处理就知道了。所以你的文件随便定 义,比如一个mp3文件,你也可以称为固件:request_firmware(“xxx.mp3″),那么你文件系统里面也要有这个xxx.mp3文 件,只不过系统给你返回二进制数据,具体的处理要在内核进行。
request_firmware 返回二进制firmware文件的地址和大小
//firmware->data和firmware->size来读取有uevent处理程序init加载进来的firmware数据了
request_firmware( & priv- > firmware, fw_name, priv- > hotplug_device) ; 给priv- > hotplug_device设备申请名字为fw_name的firmware 数据, 然后将结果放到& priv- > firmware中,
struct firmware {
size_t size;
u8 * data;
} ;
可以看到, 如果应用层的程序成功load了firmware固件文件, 那么firmware. data将指向固件数据, firmware. size为固件大小.
前段时间移植 wifi 驱动到 android 的内核上,发现 firmware 的加载始终出错,问了几个人,都不是很了解,没办法,只好自己研究一下。
原理分析从本质上来说, firmware 需要做的事情包括两件:
1, 通知用户态程序,我需要下载 firmware 了;
2, 用户态程序把用户态的数据 copy 到内核层;
3, 内核把内核态的数据写到设备上,比如 wifi 模块里;
其中第三步应该不难,关键是看看, linux 里面是如何实现第一、二步的;
实现机制简单的说,它的机制分成以下几部分:
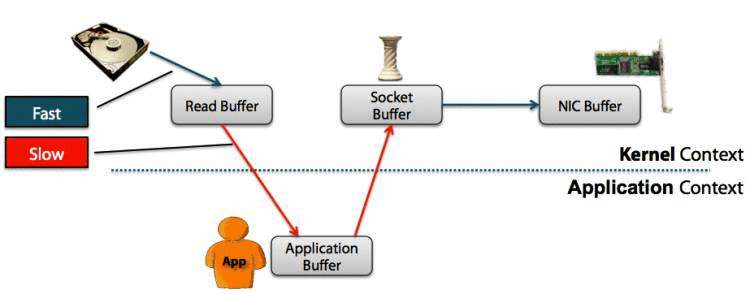
1, 通过一定的方式,通知用户态程序,比如 init 程序,如图所示:

显然是通过 kobject_uevent 的方式通知的 应用层,它的机制我有空再详细解释,简单的说,就是往一个 socket 广播一个消息,只需要在应用层打开 socket 监听 NETLINK_KOBJECT_UEVENT 组的消息,就可以收到了。
用户态的 init 是如何做的?

可以看到 init 程序打开了一个 socket ,然后绑定它, 最后通过 select 来监听 socket 上来的数据,最后调用 handle_device_fd 来处理收到的消息;当内核发送一个 KOBJ_ADD 的消息上来的时候,经过过 滤,判断是否是 firmware 要被加载的消息,然后调用
handle_firmware_event 来处理;
2, 用户态的数据如何下载到内核;
本质上它是内核创建了两个文件,一个文件 A 用来标志下载的开始和结 束,另外一个文件 B 用来接收用户层传下来的数据,当用户态的程序往 A 文件写入 1 的时候,标志用户态程序已经往里面写程序来,而往里面写入 0 的时候,就标志下载成功结束,如果写入 -1 就表示下载失败了;下面 看看这两个文件是如何被创建的 , 以及数据是如何写到内核的,请看图:

这个图基本上就是两个文件被创立的过程,以及当这两个文 件被用户态程序访问的时候将要被调用的函数,比如对于标志文件,如果往里面写入数据,将会触发函数 firmware_loading_store 函数,如果往 bin 文件里面写入数据将会触发 bin 文件类型的 write 函数;
用户态写数据的过程大约是这样的:当用户态收到 KOBJ_ADD 消息的时候 最终将会调用 handle_firmware_event 的函数;

它的过程就是:
a, 先往标志文件里面写 1 ;
b, 从用户空间读取数据;
c, 往内核创建的文件里面写数据;
d, 如果成功写入 0 ,否则写入 -1 ;
下面看看内核是如何接受这些文件的,前面提到内核创建了一个 bin 文件,用来接收用户态的数据,下面看 看这个过程:

对于 SYSFS_KOBJ_BIN_ATTR 属 性的文件,在 inode 初始化的时候,将会被赋予 bin_fops 的文件操作函数集,于是当上层调用 write 的时候,将会走到内核的 bin_fops.write 函数;这个函数干的事情很简单,就是把用户态的数据 copyright 到 bb->buffer ,而 bb->buffer 其 实是在 open 的 时候分配的空间,这样的话,就实现了用户态的数据到内核的 copy ;过程是不是完了?
还有一个步骤,这个 bb->buffer 本身是如何与 wifi 驱动交互的呢?这只是一个中间层,它的数据必须要写到 wifi 的驱动才应该算完整,而这一步其实 就是通过 flush_write 来完成的,下面看看这个过程:

这里可以清楚的看到, flush_write 做的事情就是把 bb->buffer 的内容 copy 到 wifi driver 分配的空间 fw->data 里面去了,至此,用户态的数据已经完整的写到了 wifi 的 driver 空间了;
3, 内核态的数据到 wifi 模块
这个就比较简单了,通过函数 sdio_writesb 利用 sdio 总线把数据写到模块 里面去了;
总结
Firmware 的加载主要是利用了 uevent 的通讯机制实现用户态和内核 态的交互,另外还涉及了 sys 文件系统里的文件创建 , 我加载 wifi firmware 始终出错的原因是 android 的文件系统要求把 wifi 的 firmware helper 放到 /etc/firmware 里面,而把真正 的 firmware sd8686.bin 放到 /etc/firmware/mrvl 里面,估计是 marvel 修改后的结果,结论就是,这个设计真丑;
获取固件的正确方法是当需要时从用户空间获取它。一定不要试图从内核空间直接打开包含固件的文件,那是一个易出错的操作, 因为它把策略(以文件名的形式)包含进了内核。正确的方法是使用固件接口:
| #include int request_firmware(const struct firmware **fw, const char *name, /* name 为固件文件名*/
struct device *device); /*因为 request_firmware 需要用户空间的操作, 所以返回前将保持休眠。若驱动必须使用固件而不能进入休眠时,可使用以下异步函数:*/ /* fw 参数指向以下结构体:*/ /*当固件已经发送到设备后,应当释放 firmware 结构体, 使用:*/ |
注意:要使用firmware,必须要在配置内核时选上:
Device Drivers --->
Generic Driver Options --->
<*> Userspace firmware loading support
否则会出现: Unknown symbol release_firmware 和: Unknown symbol request_firmware 的错误。
当调用 request_firmware时, 函数将在 /sys/class/firmware 下创建一个以设备名为目录名的新目录&#xff0c;其中包含 3 个属性:
loading &#xff1a;这个属性应当被加载固件的用户空间进程设置为 1。当加载完毕, 它将被设为 0。被设为 -1 时&#xff0c;将中止固件加载。
data &#xff1a;一个用来接收固件数据的二进制属性。在设置 loading 为1后, 用户空间进程将固件写入这个属性。
device &#xff1a;一个链接到 /sys/devices 下相关入口项的符号链接。
一旦创建了 sysfs 入口项, 内核将为设备产生一个热插拔事件&#xff0c;并传递包括变量 FIRMWARE 的环境变量给处理热插拔的用户空间程序。FIRMWARE 被设置为提供给 request_firmware 的固件文件名。
用户空间程序定位固件文件, 并将其拷贝到内核提供的二进制属性&#xff1b;若无法定位文件, 用户空间程序设置 loading 属性为 -1。
若固件请求在 10 秒内没有被服务, 内核就放弃并返回一个失败状态给驱动。超时周期可通过 sysfs 属性 /sys/class/firmware/timeout 属性改变。
request_firmware 接口允许使用驱动发布设备固件。当正确地集成进热插拔机制后, 固件加载子系统允许设备不受干扰地工作。显然这是处理问题的最好方法&#xff0c;但固件受版权保护&#xff0c;小心违反版权法。
这里主要介绍硬件驱动使用 Linux kernel 提供Firmware load 功能的方法;
(1) kernel source code :
drivers/base/firmware_class.c // linux 2.6.11
(2) header file:
(3) document
Document/firmware/
(4) 使用例子
Documentation/firmware_class/firmware_sample_driver.c
1 /*
2 * firmware_sample_driver.c -
3 *
4 * Copyright (c) 2003 Manuel Estrada Sainz
5 *
6 * Sample code on how to use request_firmware() from drivers.
7 *
8 * Note that register_firmware() is currently useless.
9 *
10 */
11
12 #include
13 #include
14 #include
15 #include
16
17 #include “linux/firmware.h”
18
19 #define WE_CAN_NEED_FIRMWARE_BEFORE_USERSPACE_IS_AVAILABLE
20 #ifdef WE_CAN_NEED_FIRMWARE_BEFORE_USERSPACE_IS_AVAILABLE
21 char __init inkernel_firmware[] &#61; “let’s say that this is firmware\n”;
22 #endif
23
24 static struct device ghost_device &#61; {
25 .name &#61; “Ghost Device”,
26 .bus_id &#61; “ghost0″,
27 };
28
29
30 static void sample_firmware_load(char *firmware, int size)
31 {
32 u8 buf[size&#43;1];
33 memcpy(buf, firmware, size);
34 buf[size] &#61; ‘\0′;
35 printk(“firmware_sample_driver: firmware: %s\n”, buf);
36 }
37
38 static void sample_probe_default(void)
39 {
40 /* uses the default method to get the firmware */
41 const struct firmware *fw_entry;
42 printk(“firmware_sample_driver: a ghost device got inserted  \n”);
\n”);
43
44 if(request_firmware(&fw_entry, “sample_driver_fw”, &ghost_device)!&#61;0)
45 {
46 printk(KERN_ERR
47 “firmware_sample_driver: Firmware not available\n”);
48 return;
49 }
50
51 sample_firmware_load(fw_entry->data, fw_entry->size);
52
53 release_firmware(fw_entry);
54
55 /* finish setting up the device */
56 }
57 static void sample_probe_specific(void)
58 {
59 /* Uses some specific hotplug support to get the firmware from
60 * userspace directly into the hardware, or via some sysfs file */
61
62 /* NOTE: This currently doesn’t work */
63
64 printk(“firmware_sample_driver: a ghost device got inserted \n”);
65
66 if(request_firmware(NULL, “sample_driver_fw”, &ghost_device)!&#61;0)
67 {
68 printk(KERN_ERR
69 “firmware_sample_driver: Firmware load failed\n”);
70 return;
71 }
72
73 /* request_firmware blocks until userspace finished, so at
74 * this point the firmware should be already in the device */
75
76 /* finish setting up the device */
77 }
78 static void sample_probe_async_cont(const struct firmware *fw, void *context)
79 {
80 if(!fw){
81 printk(KERN_ERR
82 “firmware_sample_driver: firmware load failed\n”);
83 return;
84 }
85
86 printk(“firmware_sample_driver: device pointer \”%s\”\n”,
87 (char *)context);
88 sample_firmware_load(fw->data, fw->size);
89 }
90 static void sample_probe_async(void)
91 {
92 /* Let’s say that I can’t sleep */
93 int error;
94 error &#61; request_firmware_nowait (THIS_MODULE,
95 “sample_driver_fw”, &ghost_device,
96 “my device pointer”,
97 sample_probe_async_cont);
98 if(error){
99 printk(KERN_ERR
100 “firmware_sample_driver:”
101 ” request_firmware_nowait failed\n”);
102 }
103 }
104
105 static int sample_init(void)
106 {
107 #ifdef WE_CAN_NEED_FIRMWARE_BEFORE_USERSPACE_IS_AVAILABLE
108 register_firmware(“sample_driver_fw”, inkernel_firmware,
109 sizeof(inkernel_firmware));
110 #endif
111 device_initialize(&ghost_device);
112 /* since there is no real hardware insertion I just call the
113 * sample probe functions here */
114 sample_probe_specific();
115 sample_probe_default();
116 sample_probe_async();
117 return 0;
118 }
119 static void __exit sample_exit(void)
120 {
121 }
122
123 module_init (sample_init);
124 module_exit (sample_exit);
125
126 MODULE_LICENSE(“GPL”);
The kernel doesn’t actually load any firmware at all. It simply informs userspace, “I want a firmware by the name of xxx“, and waits for userspace to pipe the firmware image back to the kernel.
udev is configured to run firmware_helper when the kernel asks for firmware
If you read the source, you’ll find that Ubuntu wrote a firmware_helper which is hard-coded to first look for /lib/modules/$(uname -r)/$FIRMWARE, then /lib/modules/$FIRMWARE, and no other locations. Translating it to sh, it does approximately this:
echo -n 1 > /sys/$DEVPATH/loading
cat /lib/firmware/$(uname -r)/$FIRMWARE > /sys/$DEVPATH/data \
|| cat /lib/firmware/$FIRMWARE > /sys/$DEVPATH/data
if [ $? &#61; 0 ]; then
echo -n 1 > /sys/$DEVPATH/loading
echo -n -1 > /sys/$DEVPATH/loading
fi
which is exactly the format the kernel expects.



 京公网安备 11010802041100号
京公网安备 11010802041100号