第4章 计算机控制系统的数学描述
及脉冲传递函数
本章将系统地讲述有关计算机控制系统的数学描述问题,并根据系统的数学描述对系统进行动态分析。
线性离散系统的数学描述形式和线性连续系统的数学描述形式是相对应的,通常有差分方程,脉冲传递函数(又称Z传递函数),单位脉冲响应序列(又称权序列),离散状态空间表达式等四种数学描述形式。它们分别与连续系统的四种数学描述形式相对应。离散状态空间表达式在第9章进行研究。
系统分析和系统设计时所采用的方法有关,一般是,不同的方法采用不同形式的数学描述。
4.1离散系统
离散时间系统(简称离散系统),简单地说就是其输入和输出信号均为离散信号的物理系统。在数学上,离散系统可以抽象为一种由系统的离散输入信号到系统的离散输出,()的数学变换或映射。若将这种变换或映射以符号表示,则离散系统可表示为
(4.1)
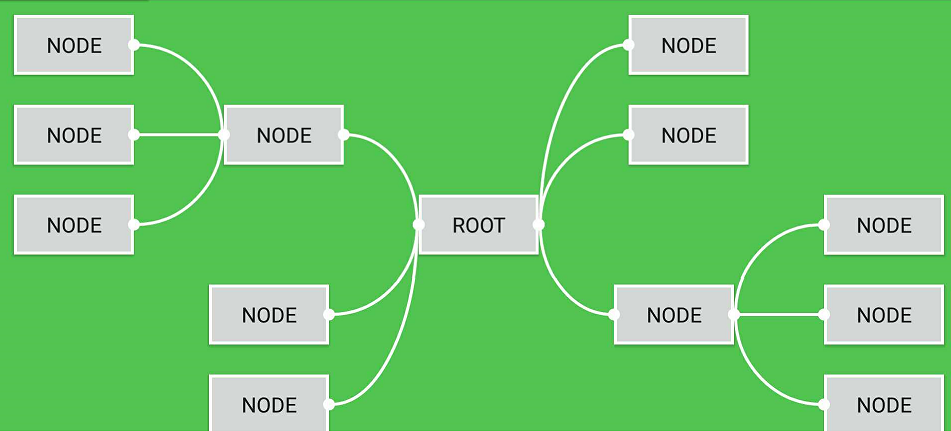
离散系统可用框图表示如图4.1所示。其中和分别表示系统的输入和输出在时刻的数值。
线性离散系统:
如果离散系统的输入信号到输出信号的变换关系满足比例叠加原理,即当输入信号为时,其中为任意常数,系统相应的输出信号可表示为
则该系统就称为线性离散系统。若不满足比例叠加原理,就是非线性离散系统。
时不变离散系统:
是指由输入信号到输出信号之间的变换关系不随时间变化而变化的离散系统,即时不变离散系统应满足如下关系,若,那么当系统输入信号为时,则相应的输出信号为
时不变离散系统又称为定常离散系统。
3.线性时不变离散系统:
是指系统的输入信号到输出信号之间的变换关系既满足比例叠加原理,同时其变换关系又不随时间变化而变化的离散系统。工程中大多数计算机控制系统可以近似为线性时不变离散系统来处理。所以本书以后的论述仅限于线性时不变离散系统。
4.2差分方程
线性时不变离散系统的基本数学描述是常系数线性差分方程。差分方程有前向差分方程与后向差分方程之分。为了方便,这里提到差分方程,若无特别说明,均指线性常系数差分方程;系统是指线性时不变离散系统。
4.2.1线性常系数差分方程
(图4.1重绘与此)
设有一单输入、单输出的线性时不变离散系统,如图4.1所示。显然,在某一采样时刻的系统输出值不仅与该时刻的输入值有关,而且与过去时刻的输入值,有关,还和过去时刻的输出值有关。这种关系可以描述为
(4.2)
式中,均为实常数,为方程的阶次。因此,式(4.2)称为阶后向非齐次差分方程。对于阶差分方程,,其余系数都有可能为零。若,就相当于方程的阶次降为阶。
若则相应离散系统有一拍(即一个采样周期T)的延迟,即系统在时刻输出只与以前各时刻的输入有关,而与当前时刻的输入值无关。若,则相应离散系统存在拍延迟,即系统当前时刻的输出只与以前时刻的输入有关。
与方程(4.2)类似,非齐次阶前向差分方程基本形式为
(4.3)
式中,均为实常数。
对于有因果关系的物理系统,方程中总是。
若,将式(4.3)的两边右移拍,即
上式右边第一项为,令,即有
项,说明当前的输出与未来输入有关,即不是因果关系。
表明方程描述的离散系统输出信号超前于输入信号,即输入信号尚未作用于系统,其对应的输出信号就已出现,或者说系统当前时刻的输出与未来时刻输入值有关。这种情况在现实的物理系统是不可能出现的。当,表明相应的系统存在延迟,若则相应离散系统的输出相对于输入有拍延迟。
工程上差分方程都是采用其标准形式如方程(4.2)和(4.3)形式,至于前向差分方程和后向差分方程,并无本质区别,前向差分方程多用于描述非零初始值的离散系统,而后向差分多用于描述全零初始值的离散系统。若不考虑系统初始值,就系统输入与输出关系而言两者完全等价,可以相互转换。
4.2.2差分方程求解
差分方程求解,就是在系统初始值(即系统输入、输出的初始值)和输入序列已知的条件下, 求解差分方程描述的系统在任何时刻的输出序列值。差分方程解的形式与微分方程解相似,非齐次差分方程的解是由通解加特解组成的。通解表示方程描述的离散系统在输入为零情况下(即无外界作用)由系统非零初始值所引起的自由运动,它反映系统本身所固有的动态特性;特解表示方程描述的离散系统在外界输入作用下所产生的强迫运动,它既与系统本身的动态特性有关,又与外界输入作用有关,但与系统初始值无关。
求解线性时不变差分方程有三种基本方法,即经典解法、计算机迭代编程法以及Z变换法。
差分方程的经典解法
与(4.2)式相应的齐次方程为
(4.4))的形式,并将其代入(4.4)
因为,故得
(4.5)
用乘(4

![开发笔记:[14]SQL 别名](https://img6.php1.cn/3cdc5/c45f/882/7913352bae06b14f.jpeg)


 京公网安备 11010802041100号
京公网安备 11010802041100号