作者:小新爱神起的小媳妇 | 来源:互联网 | 2023-07-05 20:55
问题: 没有了Anchor框的监督信息,我们怎么针对检测任务做到正确回归?
本质:样本与ground truth的对应,如何选择合适样本与真实场景对应
Anchor: 其加入降低了回归问题难度,为分类问题提供选择样本途径。 难点:定位模糊和背景特征干扰。
起源:
1.DenseBox
证明:1、单个FCN可以检测出遮挡严重、不同尺度的目标
2、单个FCN同时产生多个预测bbox和置信分数的输出
3、
1.CornerNet:
原文:CornerNet顾名思义,预测左上角和右下角来得到最后的bounding boxes。所以最基本的需要两个feature map表示对应的Corner,文中称为heatmap (所以,heatmap 本质为: 特殊意义的特征图)。

问题: 我们如何 找到代表左上角和右下角的 feature map呢?
回答: 我们通过对角点的预测 ,用两个分支分别预测top-left Corner 和bottom-right Corner,两个分支的结构完全一样。
Heatmap 与 角点预测:
1)Heatmaps尺度为H×W×C H\times W\times CH×W×C,C为类别数,每个通道使用sigmoid激活。
2)
原文:Heatmap分支的设计:
方式一:加入了一项penalty reduction,来reweight 在gt(目标点)点附近的不同点对网络贡献程度
方式二:采用了focal loss的变体形式

方式三:Offset分支进行Offset的补偿
弥补将heatmap上的点映射到原图尺寸上时的位置误差,使用smooth l1函数进行训练。
方式四:Grouping Corner(类间间距大,类内间距小)
引入了一个embedding分支,使得来自同一个object的Corner其对应的embedding vector之前的距离应该尽可能小
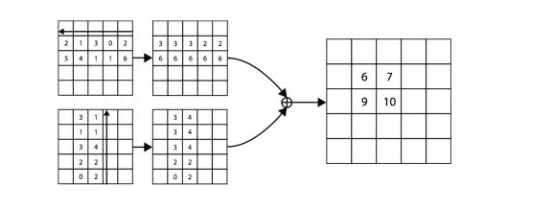
方式五: Corner Pooling
由于目标物体是不规则的,因此会出现标注点Corner周围都是背景区域,对Corner的预测很不利。,因此我们需要一个操 作可以将物体边界信息聚合到Corner点上。
pooling操作很简单,对每个点,向水平和垂直方向进行pooling操作,这样同一个水平和垂直方向上就包含了该方向的物体边界信息。
以top-left Corner为例
pooling操作很简单,对每个点,向水平和垂直方向进行pooling操作,这样同一个水平和垂直方向上就包含了该方向的物体边界信息。
以top-left Corner为例




 京公网安备 11010802041100号
京公网安备 11010802041100号