作者:手机用户2602886967 | 来源:互联网 | 2023-08-13 22:53
前言: 对于不同的AGV导航算法来说AGV的,VSLAM是比较有前景的。
视觉算法实现应由AGV的场景的需求来定,对不同的算法支持。
VSLAM的基本框架:

VSLAM的分类
VSLAM的算法主要分为三类,LSD_SLAM,ORB_SLAM,RGB-D SLAM。

RGB-D SLAM的典型框架如下:

- RGB-D SLAM位姿图构建包括特征检测与匹配 、运动估计、关键帧选择、环形闭合检测。
- 特征检测算法包括:SIFT、SURF、FAST、ORB等
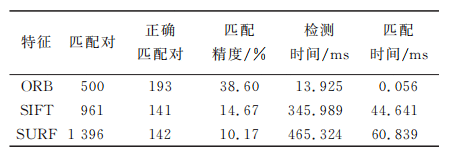
一般选ORB提高匹配时间。
-
- 匹配算法:针对ORB,采用随机采样一致性算法(RANSAC)+3D CAM深度信息
- 计算帧间匹配的内点、旋转向量、平移向量,然后计算相对运动距离
- 特征点追踪和最小视觉变化进行关键帧选择
- 利用RANSAC进行局部闭合检测和全局环形检测
- 图优
- 非欧式优化,g2o流形优化,TORO
- 欧式空间优化:(最小二乘法、松弛优化、随机梯度下降)
- 地图构建
- RTAB-MAP(Real-Time Appearance-Based Mapping)
-
RTAM算法是通过检查外观来构建地图:
-

对于3D CAM来说,用于构建3D 的点云MAP
- DVO(Dense Visual Odometry) SLAM(正在开发)
- RGB-D SLAM V2
系统主要构成:ROS project, OpenCV, PCL, OctoMap, SiftGPU
小结:
- TUM RGB-D 和ICL-NUM算法的测试表明,RGB-D SLAM V2的机器性能要求较高,而RTAB-MAP的鲁棒性比较差,精确度和性能要求比较高。而精度要求较低情况下,为DVO SLAM算法。
- 上述算法的运行时间和场景有关。所以,VSLAM的使用应该结合场景的具体情况来实现。Robustnes测试RTAB的成功率比较低。
- RGBD各个算法,如果结合GPU的使用,能够显著提高系统的运行效率。










 京公网安备 11010802041100号
京公网安备 11010802041100号