作者:高人arm | 来源:互联网 | 2023-09-17 15:12
【1】ROSA手术机器人
【1.1】产品介绍
ROSA专门用于脑部手术辅助,ROSA 脑部手术机器人可应用于多种神经外科手术包括:DBS术:帕金森病、肌张力障碍、梅杰综合征、特发性震颤等;SEEG癫痫;脑内血肿排空、脑组织活检、脑脓肿穿刺引流、脑内异物摘除;颅骨开放性手术中导航包括脑室镜等。我们对ROSA机器人手术过程中融合、注册、矫正等方面不断改进,ROSA机器人更有效的解决了神经外科精度要求高、手术时间长、计算繁琐、缺乏三维精度视野等问题;在提高手术操作的精确性的基础上,减小手术创伤、简化手术操作,缩短手术时间。ROSA 脑部手术机器人将手术计划系统、专利的导航功能及机器人辅助器械定位和操作系统(可提供触觉反馈即高级的可视化功能)整合于一体,开创了立体定位技术的里程碑。医生在术前将影像数据导入手术计划系统进行高质量三维融合,根据靶点位置、形态,血管走形等设计个性化手术路径,手动辅助机器人或自动注册识别已固定患者,导航功能使其以特定姿势角度移动到指定的位置,在机器人关节锁定后保持稳定,从而为医生建立一个稳固的手术平台,医生可以沿着机器人末端执行器的方向,进行DBS等高精度微创手术。

【1.2】公司及现状
全球骨科巨头捷迈邦美(Zimmer Biomet),Zimmer Biomet所涉及的业务极其广泛,目前主要的业务板块有膝关节、髋关节、S.E.T(S.E.T包括外科、运动医学,创伤等业务)、牙科、脊柱,其中膝关节业务占比最大。
参考文献:ROSA机器人在神经外科的应用
ROSA手术机器人之父BertinNahum:梦想定会照进现实!
捷迈邦美(Zimmer Biomet)是美国一家上市医疗器械公司,成立于1927年,总部位于印第安纳州华沙,公司主要生产铝夹板。
2001年,捷迈邦美从Bristol-Myers Squibb分拆出来,并于8月7日在纽约证券交易所开始交易,股票代码为“ZMH”。2011年11月,公司收购ExtraOrtho,Inc.(ExtraOrtho)。2012年1月,公司收购总部位于美国内华达州里诺的Synvasive Technology,Inc。
公司网址:https://www.medtech.org/directory/Medical%20Device
【2】达芬奇
【2.1】产品介绍
达芬奇外科手术系统是一种高级机器人平台,其设计的理念是通过使用微创的方法,实施复杂的外科手术。达芬奇机器人由三部分组成:外科医生控制台、床旁机械臂系统、成像系统。
达芬奇机器人由三部分组成:外科医生控制台、床旁机械臂系统、成像系统。简言之就是内窥镜手术器械控制系统。
外科医生控制台

达芬奇手术机器人三大组成部分
主刀医生坐在控制台中,位于手术室无菌区之外,使用双手(通过操作两个主控制器)及脚(通过脚踏板)来控制器械和一个三维高清内窥镜。正如在立体目镜中看到的那样,手术器械尖端与外科医生的双手同步运动。
床旁机械臂系统
床旁机械臂系统(Patient Cart)是外科手术机器人的操作部件,其主要功能是为器械臂和摄像臂提供支撑。助手医生在无菌区内的床旁机械臂系统边工作,负责更换器械和内窥镜,协助主刀医生完成手术。为了确保患者安全,助手医生比主刀医生对于床旁机械臂系统的运动具有更高优先控制权。
成像系统
成像系统(Video Cart)内装有外科手术机器人的核心处理器以及图象处理设备,在手术过程中位于无菌区外,可由巡回护士操作,并可放置各类辅助手术设备。外科手术机器人的内窥镜为高分辨率三维(3D)镜头,对手术视野具有10倍以上的放大倍数,能为主刀医生带来患者体腔内三维立体高清影像,使主刀医生较普通腹腔镜手术更能把握操作距离,更能辨认解剖结构,提升了手术精确度。
公司网址:https://www.intuitive.com/en-us//
【2.2】公司背景及现状
Intuitive Surgical一直是市场的主导者,因此,Intuitive Surgical在手术机器人行业内有着无可比拟的优势。现在,Intuitive Surgical发展得非常迅猛。据统计,2015年已经有70万多次是依靠其系统完成,相比2014年增长15%。据《财富》杂志报道:五年之内,美国三分之一(现在为15%)的手术是由机器人操作完成。
相关竞争者
Verb Surgical:Verb Surgical由谷歌母公司Alphabet生命科学部门Verily与制药巨头强生联手创办,旨在建立一个能够结合机器人、高级成像、机器学习、大数据和先进器材的平台,这样医生就能使用开放和侵入的程序。换句话说,它们的目标就是给予医生更多选择。医生能够根据需要在部分手术程序中使用Verb Surgical,或者全程使用它。谷歌和强生都非常关注大数据,一份金融分析师表示:从大数据中记录和分析程序能够真正让机器人手术程序得以复制,让它得到更大范围的应用。
Medtronic(美力敦):美敦力公司成立于1949年,由Earl E.Bakken及Palmer J.Hermundslie建立,为全球500强集团。美敦力于1957年制造出第一台便携式体外心脏起搏器,并于1960年制造出第一台可靠的可植入式心脏起搏系统。由此奠定了美敦力全球起搏技术领导者的地位。今天,美敦力已成为世界上占领导地位的医疗技术公司,为各种慢性疾病患者提供终身的解决方案,美敦力公司总部位于美国明尼苏达州的明尼阿波利斯市。致力于为心血管疾病,神经科,糖尿病,脊椎疾病以及五官科疾病患者提供治疗、诊断及监测方案。美力敦表示旨在2018年年中之前发布手术机器人,首先在印度得以运用。
TransEnterix:TransEnterix为加拿大手术机器人公司, 原本计划自其先前产品“蜘蛛”微创腹腔镜手术设备(SPIDER Surgical System)进一步研发手术机器人 SurgiBot,但遭到美国食品药物管理局(FDA)否决。后来转而专注于 2015 年以近亿美元购并意大利 SOFAR 公司所取得的 ALF-X 手术机器人。最近,TransEnterix向意大利米兰的一家医院销售了第一台产品。相比达芬奇外科手术系统,TransEnterix设备更便宜,并且有着达芬奇外科手术系统没有的功能:比如眼球追踪软件和触觉反馈。
Titan Medical:Titan Medical是一家多伦多公司,其正在开发Sport Surgical系统,将手术台、单切口摄像头、置和多关节器材结合,并将于2017年在美国发布。Titan机器人系统旨在将机器人手术精细化,让机器人能够进行微小部位的手术,包括胆囊切除术。
Medrobotics:Medrobotics的Flex Robotic系统提供喉部手术的机器人协助视觉系统,让手术更加灵活,操作更加便利。系统可以让机器人到达人工医生到达不了的地方,帮助喉部患病者解除病痛。
潜力巨大的新生力量
Smith & Nephew:Smith & Nephew由英国专业药剂师Thomas John Smith 于1856年在英格兰北部的赫尔所创立,总部设于英国伦敦。最近将妇产科设备销售给Medtronic,并在收购了 Blue Belt科技公司。其产品线中三大类产品:骨科、内镜、伤口护理系列,均是全球业界的佼佼者。
OMNI:OMNI最近改名为Orthopaedic Synergy和OMNILife Sciences,主要业务是为髋部和膝盖手术提供机器人辅助系统,结合导航机器人系统、移植术、定制化工具和专利技术,来帮助医生更加精确地进行器官移植。
Auris Surgical Robotics:Auris Surgical Robotics创立于2007年,专注于眼科手术的机器人微型手术系统。据报道,公司最近进行了一轮大型的融资。不过公司并没有透露如何使用这笔资金。最近,它收购了Hansen Medical公司,以求在心血管机器人手术上有一个更好的发展。
Medtech :Medtech 为法国手术机器人公司。Medtech 研发了Rosa Brain和Rosa Spine机器人辅助手术平台,这两个平台在欧盟都有CE认证。其中,Rosa Spine设备还在今年1月获得了来自FDA的许可。
Cambridge Medical Robotics (CMR) :Cambridge Medical Robotics 创立于 2014 年,公司总部位于英国剑桥,公司致力于为微创手术开发下一代通用机器人系统。公司希望能够通过扩大机器人执行程序的范围,使微创手术能够服务于更多的人群,并且手术费用经济实惠,在消费者可承受范围之内。这一系统将改变机器人手术的市场现状。最近,CMR获得了2030 万美元 A 轮融资,预计到 2025年,年收入将达到 200 亿美元。继今年 6 月份成功启动临床标本实验后,CMR 的这一轮最新融资将进一步推动公司角色向全球医疗设备供应商靠拢。
参考文献:手术机器人行业报告:Intuitive Surgical一路领先,但别忘了那些后起之秀
揭秘达芬奇手术机器人的两大内幕 手术机器人引进需谨慎
我们的达芬奇外科手术机器人
【3】天智航
【3.1】产品介绍
天玑®骨科手术机器人能够辅助开展脊柱外科手术以及创伤骨科手术,以机械臂辅助完成这些手术中的手术器械或植入物的定位。产品兼容2D与3D模式,独有入钉点及钉道计算智能算法,机械臂精准运动到规划位置,借助骨科引导器,为医生提供精准稳定的导针置入路径。按照术中规划,医生可以精准设计并置入内植入物。天玑另辟蹊径,使常规手术精准微创化、复杂手术标准化、关键操作智能化、医疗资源均等化,临床优势显著,智慧骨科的未来可期。
【3.2】公司背景及现状
天智航作为中国医疗机器人开拓者,获得100余项专利、20余项国家级和省部级科研重点项目、是医疗机器人国家地方联合工程研究中心依托单位,拥有博士后科研工作站, 属于国家机器人标准化总体组成员单位、同时是中国生物医学工程学会医用机器人分会副主任委员单位、北京智能机器人产业联盟副理事长单位以及中关村医疗器械产业联盟理事长单位。
国内公司:科创班上市企业
公司网址:http://cn.tinavi.com/index.php?c=article&a=type&tid=113
【4】长木古
【4.1】产品介绍
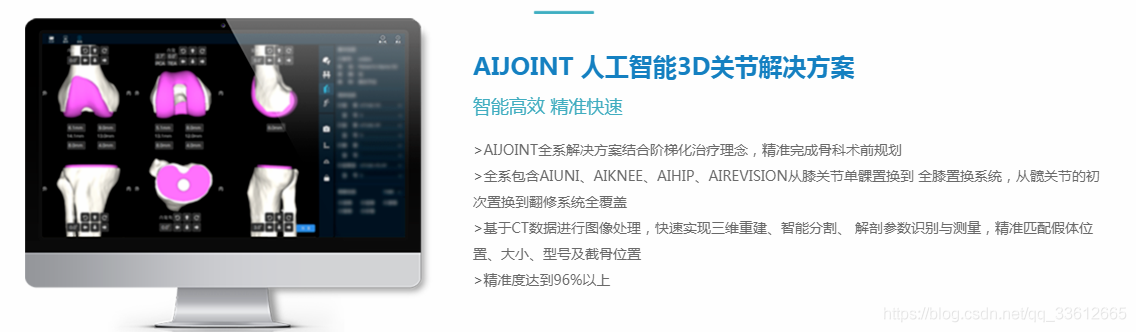
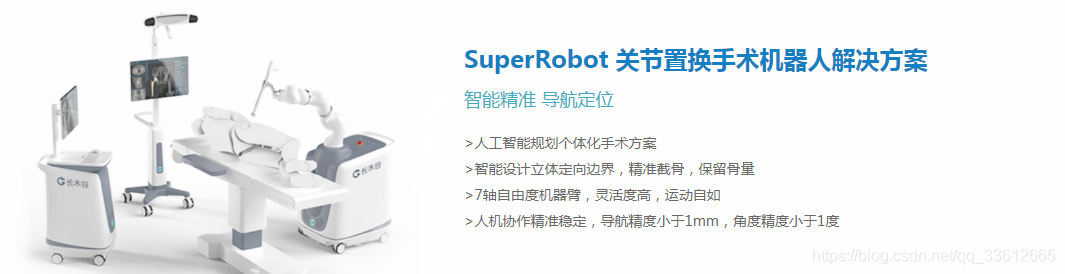
【4.2】公司背景及现状
北京长木谷医疗科技有限公司(长木谷)是一家专注于骨科人工智能与手术机器人解决方案的国家级高新技术企业, 面向医院骨科提供人工智能辅助诊断、个体化手术计划、手术机器人、术后评估等全流程解决方案。 公司拥有美国哈佛大学、斯坦福大学、清华大学、北京大学等世界一流院校背景的研发团队。 成立以来,长木谷被评为国家高新技术企业、中关村高新技术企业、中关村雏鹰人才企业、中关村金种子企业、 中关村科技型小微企业、中国医疗人工智能企业TOP50、环球时报最具投资价值十佳企业等。 长木谷现已拥有150余项国内外专利与软件著作权等科技成果。 长木谷获国内外顶级风投青睐,目前已经完成五轮融资(Pre-B轮),投资方包括元禾原点,元生创投,软银中国,联想创投,中关村发展集团,联想之星,峰瑞资本等。长木谷致力于打造中国智造、世界领先的骨科人工智能与手术机器人解决方案, 让众多的中国患者受益,让天下没有难做的手术。
公司网址:https://changmugu.com/index/index/index.html
【5】remebot
【5.1】产品介绍


【2.2】公司背景及现状
北京柏惠维康科技有限公司成立于2010年,是专业从事高端医疗器械研发、生产、运营的高科技公司,于2018年取得神经外科手术导航定位系统医疗器械注册证,2020年第二款产品顺利获批。公司同时担任中国医疗装备人工智能联盟理事单位,中关村前沿科技与产业服务联盟理事单位。
公司网址:https://www.remebot.com.cn/index.php/topic/index
【6】华科精准
【6.1】产品介绍
专注于神经外科
【6.2】公司背景及现状
华科精准一直在积极搭建国内神经外科神经外科学科发展交流平台。我们将邀请各位神经外科专家一起讨论神经外科的学科发展和医疗创新,分享神经外科临床的宝贵经验。华科精准自创立起就坚持扎根临床,以医疗需求核心,积极参与多方面临床科研,目前公司和20+顶尖医院开展临床科研活动,涉及到手术机器人、精准手术导航、医用电极等多方面,公司始终致力于与医生和患者一起相互协作,共同提高医疗效率和水平。
公司官网:http://www.sinovationmed.com/#
【7】附录
2020年,医疗机器人还有哪些机会?




 京公网安备 11010802041100号
京公网安备 11010802041100号